ных временных интервалов, относительно которых измеряются временные интервалы, соответствующие угловым интервалам между штрихами контролируемого лимба. Эталонные интервалы формир5пот путем одновременной фиксации всех штрихов контролируемого лимба при его вращении и регистрации центра полученных суммарных импульсов. Погрещность углового по
1
Изобретение относится к измерительной технике, а 1-гменно к измерению угловой погрешности положения штрихов лимба.
Цель изобретения - повьш1ение точ- ности измерения и расширение области применения способа путем увеличения точности формирования эталонных временных интервалов, относительно которых измеряются временные интервалы соответствующие угловым интервалам между штрихами контролируемого лимба
На чертеже изображена принципиальная схема устройства для осуществления предлагаемого способа.
Устройство для осуществления предлагаемого способа содержит фотоэлектрические датчики 1 и 2 сигналов о наличии штрихов контролируемого лимба 3, идентичный контролируемому лимб 4, источник 5 излучения, оптически связанный посредством конденсорных линз 6 и 7 и кольцевых отражателей 8 и 9 с датчиками 1 и 2, которые через формирователи 10 и 11 импульсов под- ключены к первым входам счетчиков 12 и 13„ Вторые входы счетчиков 12 и 13 подключены к генератору 14 импульсов стабильной частоты, а выходы подключены к блоку 15 деления, который сво- им выходом связан с первым входом блока 16 вычитания. Выход блока 16 вычитания и его второй вход соответственно последовательно связаны с блоком 17 умножения, блоком 18 сумми- рования, регистрирующим блоком 19, блоком 20 управления и кодонабирателем 21 .
Способ осуществляют следующим образом.
Контролируемый лимб 3 приводят во враще.ние под датчиками 1 и 2 сигналов
ложения штрихов лимба измеряется по U
формуле лЧ %1-(п. )7, где суммарная погрешность положения штрихов лимба; %,- - эталонные значения угловых интервалов между штрихами лимба, временные интервалы между импульсами от каждого штриха лимба, п, - эталонные временные интервалы} N - количество штрихов в Лимбе. 1 ил.
5
0 0 5
0
о наличии штрихов лимба. На кодонабирателе 21 устанавливают номинальную угловую цену импульса % с контролируемого лимба 3. Затем включают блок 20 управления, который вырабатывает управляющие командные импульсы.oi, ctg и оС , сдвинутые по времени, например, с помощью линий задержек. По командному импульсу oi приводятся в исходное положение (сбрасываются) счетчики 12 и 13 импульсов. Первый импульс, выработанный датчиком 1 и формирователем 11, открывает счет импульсов стабильной частоты с генератора 14. Второй и каждый последующий импульсы, приходяш;ие на вход этого счетчика, дают команды на передачу сосчитанного счетчиком числа импульсов п в блок 15 деления на сброс счетчика 12 и на начало счета вновь. Одновременно с датчика 2 и формирователя 10 вырабатывается импульс со всех штрихов контролируемого лимба. Для. этого излучение от источника 5 конденсорной линзой 6 направляется на кольцевой отражатель 8, с помощью которого равномерно освещают все штрихи контролируемого лимба 3. С целью обеспечения модуляции потока излучения используется лимб 4, который по своим конструктивным параметрам аналогичен контролируемому, т.е. это может быть лимб, который подпежит контролю, либо уже прокон-, тролированный. Промодулированный поток излучения собирается вторым кольцевым отражателем 9 и конденсорной линзой 7 и направляется на датчик 2, Второй и каждый последующий импульсы с него приходят на первый вход счетчика 13 и дaJoт команды на передачу сосчитанного счетчиком числа импульсов n, в блок 15 деления, на сброс счетчика 13 и на начало счета вновь.
В результате получают значения угловых интервалов между каждым .штрихом контролируемого лимба
К1 (( и их эталонных значений 4
si ,-
где D - скорость вращения контроли- лируемого лимба.
В блоке 15 деления по команде блока 20 управления происходит деле ние числа импульсов п., сосчитанных счетчиком 12, на число импульсов п., сосчитанных счетчиком 13, т.е. выполняются Вычисления.по формуле
Ч к кПю ПЦ1
91
(О
4ti
Из формулы (1) легко получить
Пк.1
(2)
U) W . i. il
«v -n,.
в блоке 16 вычитания по команде происходит определение отношения числа импульсов пЩ- и Uj,- как дополнения до единицы, т.е. величина и nj вычисляется по выражению
ДП-(2Ь1 ,) Пэт
(3)
Как известно, погрешность положения штрихов контролируемого лимба определяется по формуле
( .
1
Подставим (2) в формулу (4), подучим
«H i: tx2iV-l)i(4.,.)
J 1 KI 1
.
(5)
в блоке 17 умножения происходит определение части выражения (5), стоящего под знаком суммы, т.е. производится умножение на номинальную угловую цену импульса контролируемого лимба, набранной на кодонабирателе 21.
Определяемые значения погрешностей контролируемого лимба в каждом цикле поступают в суммирующий блок 18, где по команде oij блока 20 уп
равления каждое значение погрешности суймируется с предыдущим, т.е. лЧ
(, + ...+k).
5 Результат суммирования в каждом цикле поступает в блок 19 регистрации (например, на печатающее устройство типа УВВПЧ-30-004), где они. фиксируются. Блок 19 после фиксации каждого
fO
f5
текущего значения погрешности положения штриха А тактирует блок 20 управления, который вырабатывает командные импульсы , , etj, и iCj для вычисления и регистрации следующего значения погрешности.
Повьш1ение точности измерения в предлагаемом способе обусловлено тем, что для измерения погрешности
положения штрихов лимба используется импульс, сформированный со всех штрихов, который, как известно, имеет погрешность при формировании по крайней мере в 3-4 раза меньшую по
сравнению с погрешностью формирования импульсов с помощью датчика перемещения. Колебания скорости вращения лимба в предлагаемом способе не сказываются на точности измере-
НИН, так как формирование измеренных и эталонных импульсов осуществляется практически синхронно с одного лимба, колебания скорости для каждого участка которого одинаковы, кроме
того, при определении погрешности положения по формуле (1) вычисляется отношение п„./Пд., компенсируя тем самым колебания скорости.
Расширение функциональных возможностей подтверждается тем,,что при осуществлении предлагаемого способа можно измерять погрешность положения штрихов любого лимба, имеющего растровую дорожку.
Формула изобретения
Способ измерения угловой погреш- ности положения штрихов лимба, заключающийся в том, что формируют временные интервалы, соответствуницие угловым интервалам между штрихами контролируемого лимба, формируют эталон- ные временные интервалы, фиксируют контролируемые и эталонные временные интервалы, сравнивают их, отличающийся тем, что, с целью повышения точности изме5 13268846 .
рения и расширения области применения, гдеА суммарная погрешность поэталонные временные интервалы форми-ложения штрихов лимба;
руют путем одновременной фиксацииM j-- эталонные значения угловых
всех штрихов измеряемого лимба и ре-интервалов между штрихами
гистрации центров, полученных от них 5лимба;
суммарных-импульсов, а погрешностьп - - временные интервалы между
углового положения штрихов контролиру-импульсами от каждого штриемого лимба вычисляется по формуле. ха контролируемого лимба;
- эталонные временные интерл 2i;k(2-«i- -1)1, Овалы;
ч L з JN - количество штрихов в лимбе.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения погрешностей деления лимбов | 1986 |
|
SU1411583A1 |
| Устройство для контроля погрешностей лимбов | 1986 |
|
SU1384951A1 |
| СПОСОБ И УСТРОЙСТВО ИЗМЕРЕНИЯ УГЛОВ И ФОРМИРОВАНИЯ УГЛОВЫХ МЕТОК | 1995 |
|
RU2115885C1 |
| Устройство для контроля кинематической погрешности передач | 1985 |
|
SU1270550A1 |
| Устройство для контроля кинематической погрешности передач | 1985 |
|
SU1362912A1 |
| СПОСОБ ИЗМЕРЕНИЯ ТОЧНОСТИ ИЗГОТОВЛЕНИЯ УГЛОИЗМЕРИТЕЛЬНЫХ СТРУКТУР, НАНОСИМЫХ НА ПРОЗРАЧНЫЙ НОСИТЕЛЬ | 2003 |
|
RU2242715C1 |
| Устройство для измерения колебаний скорости перемещения | 1985 |
|
SU1303944A1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВОЙ ПОГРЕШНОСТИ! п м; ПОЛОЖЕНИЯ ШТРИХОВ ЛИМБАI ' 1^1 | 1970 |
|
SU422949A1 |
| Устройство для контроля дорожек лимбов угломерных приборов | 1981 |
|
SU1049736A1 |
| Способ измерения длин и углов и устройство для его осуществления | 1990 |
|
SU1820207A1 |
Изобретение относится к измерительной технике, а именно к измерению угловой погрешности положения штрихов лимба. Целью изобретения является повьш1ение точности способа измерения и расширение его функциональных возможностей путем увеличения точности способа формирования эталон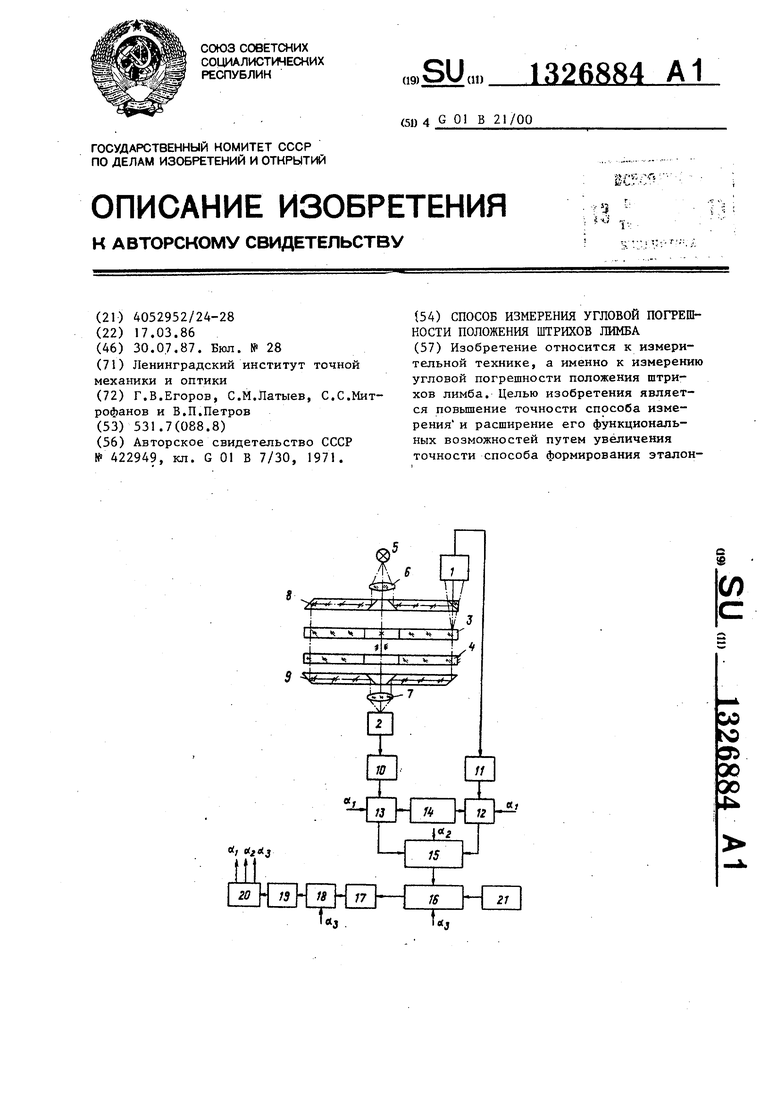
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВОЙ ПОГРЕШНОСТИ! п м; ПОЛОЖЕНИЯ ШТРИХОВ ЛИМБАI ' 1^1 | 1970 |
|
SU422949A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
