1
Изобретение относится к области весоизмерительной техники.
Известны весовые порционные дозаторы, содержащие грузоприемный бункер, установленный на датчиках, подключенных к измерительному блоку с усилителем и аналого-цифровым преобразователем, задатчик, узел сравнения, блок управления и блок автоматической коррекции с грузами известной величины, управляемыми электромагнитами, и двумя реверсивными счетчиками, входы которых соединены с аналого-цифровым преобразователем измерительного блока. Однако эти дозаторы не обеспечивают требуемую точность.
В предлагаемом дозаторе блок автоматической коррекции снабжен двумя регистрами памяти, вход первого из которых подключен к выходу измерительпого блока, а выход соединен с одним из реверсивных счетчиков, вход второто регистра подключен к блоку управления, а выход соединен с узлом сравнения, и множительным элементом, первый вход которого подключен к задатчику, второй вход соединен с блоком управления, а выход связан с узлом сравнения.
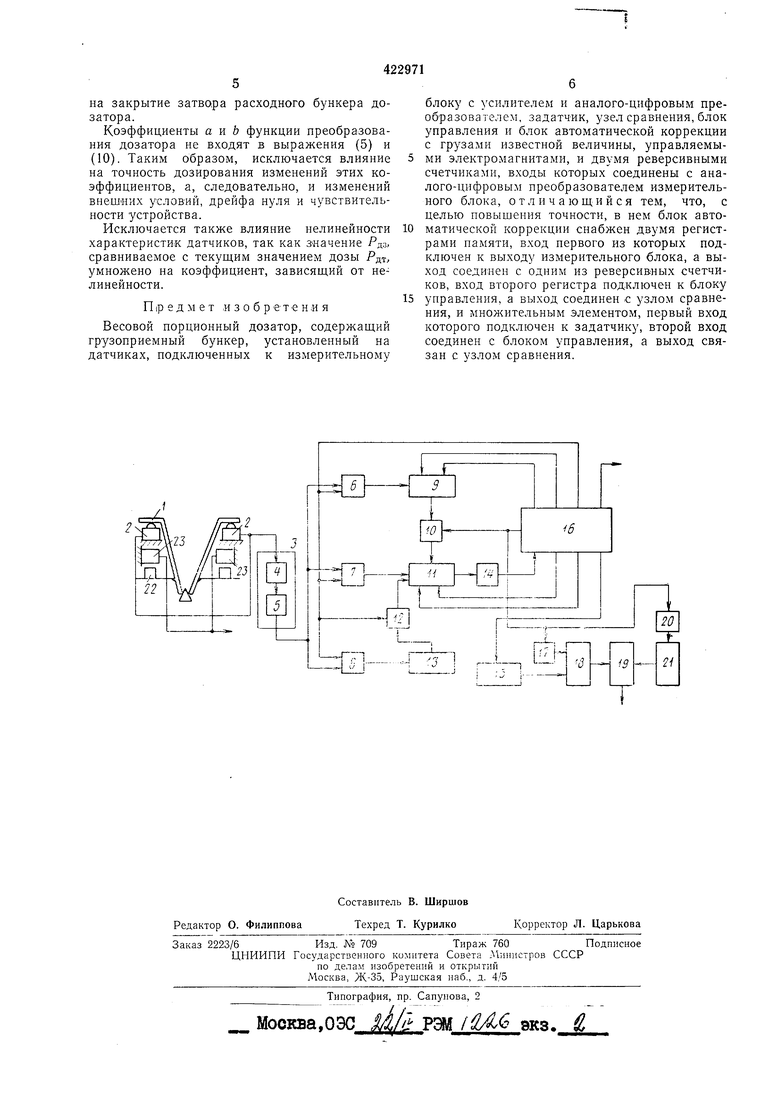
На чертеже показана блок-схема описываемого дозатора.
Бункер 1 установлен на датчиках 2, подключенных к измерительному блоку 3 с усилите лем 4 и аналого-цифровым преобразователем
5, к выходу которого подсоединены логические элементы «И 6, 7 и 8. Реверсивный счетчик 9 через элемент «И 10 связан с реверсивным счетчиком 11, который через элемент «И 12 соединен с регистром памяти 13. Счетчик 11 снабжен нуль-индикатором 14. Задатчик 15 связан с блоком управления 16, к которому через элемент «И 17 подключен множительный элемент 18. Выход элемента 18 соединен
с узлом сравнения 19. Через элемент «И 20 регистр памяти 21 связан с блоком управления 16. Регистр памяти 21 подключен также к узлу сравнения 19. Грузы 22 известной величины РО фиксируются на бункере 1 электромагнитами 23.
Принцип действия дозатора заключается в проведении дополнительных измерений, позволяющих получить информацию не только об измеряемом весе дозируемого материала, но и о погрешностях, возникающих в результате измерения.
Функция преобразования дозирующей системы с достаточной степенью точности может быть представлена в виде
Y--,-aP-T-b + kP,(1)
где У - выходной сигнал;
Р - входное воздействие; а и 6 - параметры функции преобразования дозирующей системы; /г--коэффициент ыелинешюсти весоизмерительных датчиков; Изменение параметров а и b под влиянием вариаций внешних условий, а также от временного дрейфа характеристик отдельных элементов является источником статических погрешностей дозируюш.ей системы. При этом изменение параметра а обуславливает мультипликативную составляющую (погрешность чувствительности), а изменение параметра b - аддитивную составляющую (погрешность «нуля). Влияние параметров а и b на точность дозирования устранено в описываемом дозаторе за счет устройства автокоррекции, реализующего специальный алгоритм функционировапия дозатора. Дозатор работает следующим образом. В начальном состоянии два груза 22 известной величины РО с помощью электромагнитов 23 фиксируются на бункере 1. В реверспвном счетчике 11 записано значение заданной дозы, умноженное на коэффициент нелинейности датчиков /%Рдз, в множительном э.тементе 18 в качестве множимого записано ЧИСЛО Рдз, а в качестве множителя . Датчики 2 воспринимают вес бупкера 1 и грузов 22: PQ + PQ. Сигнал FI через усилитель 4 и аналого-цифровой преобразователь 5 поступает с датчиков 2 на вход счетчика 9, который по сигналу с блока 16 устанавливается в направлении сложения. Счетчик 11 и регистр памяти 13 па время первого измерения закрыты. По окончании первого измерения по сигналу с блока управлеппя 16 отключаются электромагниты 23, и бункер 1 освобождается от грузов 22. Реверсивный счетчик 9 устанавливается в направлении вычитания, открывается регистр памяти 13. Результат 2 второго измерения собственного веса бункера 1 PQ поступает в регистр памяти 13 и в счетчик 9. Таким образом, в счетчике 9 по окопчанпи второго измерения оказывается записапной величина FI-Уг, а в регистре памяти Первые два измерения, производимые при закрытом затворе расходпого бупкера, занимают небольшой отрезок пачальпого участка характеристики датчиков. Этот участок с любой требуемой для практики степенью точности считать линейным. Таким обарзом, справедливы соотношения У.:.:а(Рб + Я„) + у, : aPf, + b у, -: аР, Из выражения (4) следует, что разность пропорциональна чувствительности дозирующей системы. По окончании второго измерения по сигналу с блока унравлепия 16 начинается деление содерлчимого реверсивного счетчика 11 (/fe-Рдз) на содержимое счетчика 9 : ч- Деление ведется методом последовательного вычитания до прихода в блок 16 сигнала с нуль-индикатора 14 реверсивного счетчика 11. По этому сигналу процесс деления прекращается, а реkPзультат-- - через элемент «И 17 поступает в множительный элемент 18, где суммируется с числом , записанным в нем в качестве множителя. Полученная сумма перемножается с множимым, а результат поступает на первый вход узла сравнения 19. По окончании перечисленных процессов по сигналу с блока управления 16 открьшается затвор расходного бункера (на чертеже не показан) и начинается истечение дозируемого материала в бункер 1. Элементы «И 6, 8 и 17 закрываются, а элементы 7, 10, 12 и 20 открываются. Третье измерение УЗ веса бункера 1 и дозируемого материала: Рб + Рдт записывается в направлении сложения в реверсивный счетчик 11. Так как при нарастании веса дозы начинает сказываться нелинейность характеристик датчиков, имеем y,(P, + P,) + b + kPl, или П-аРд.+ У. + ЙР По окончании третьего измерения по команде с блока управления 16 счетчик 11 устанавливается в направлении вычитания. Через элемент «И 12 из регистра памяти 13 в него поступает чпсло Таким образом, в счетчике 11 фиксируется число УЗ - У, аРд, + kPi, По сигналу с блока управления начинается деление содержимого счетчика 11 на содержание счетчика 9. В результате получают .( + )(8) 1 / Так как из выражения (4) выражение (8) равно 3 Z П ДТ I п у Y / V г, Иог I - г J Полученное число через элемент «И 20 поступает в регистр памяти 21 и на второй вход зла сравнения 19, где сравнивается с сигнаом (5), поступающим на его первый вход с множительного элемента 18. В случае неравенства этих сигналов процесс измерения веса грузоприемпого устройства и екущей дозы материала повторяется вновь. В момепт равенства сигналов (выражения 5 и 10) узлом сравнения 19 подается команда
на закрытие затвора расходного бункера дозатора.
Коэффициенты а и b функции преобразования дозатора не входят в выражения (5) и (10). Таким образом, исключается влияние на точность дозирования изменений этих коэффициентов, а, следовательно, и изменений внешних условий, дрейфа нуля и чувствительности устройства.
Исключается также влияние нелинейности характеристик датчиков, так как значение Ядз, сравниваемое с текущим значением дозы Рдт, умножено на коэффициент, зависящий от нелинейности.
Предмет изобретения
Весовой порционный дозатор, содержащий грузоприемный бункер, установленный на датчиках, подключенных к измерительному
блоку с усилителем и аналого-цифровым преобразователем, задатчик, узел сравнения, блок управления и блок автоматической коррекции с грузами известной величины, унравляемыми электромагнитами, и двумя реверсивными счетчиками, входы которых соединены с аналого-цифровым преобразователем измерительного блока, отличающийся тем, что, с целью повышения точности, в нем блок автоматической коррекции снабжен двумя регистрами памяти, вход первого из которых подключен к выходу измерительного блока, а выход соеди нен с одним из реверсивиых счетчиков, вход второго регистра подключен к блоку
управления, а выход соединен с узлом сравнения, и множительным элементом, первый вход которого подключен к задатчику, второй вход соединен с блоком управления, а выход связан с узлом сравнения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Весовой порционный дозатор | 1987 |
|
SU1432339A1 |
| Автоматический весовой порционный дозатор с цифровым управлением | 1984 |
|
SU1224596A1 |
| Цифровое устройство управления весовым порционным дозатором | 1980 |
|
SU892226A1 |
| Устройство для дозирования расплава | 1985 |
|
SU1308427A1 |
| Устройство для автоматическойпОгРузКи СыпучиХ гРузОВ ВдВижущиЕСя ТРАНСпОРТНыЕ СРЕдСТВА | 1978 |
|
SU806579A1 |
| Устройство автоматического управления установкой для загрузки дозированными порциями сыпучего груза в транспортные средства | 1989 |
|
SU1765089A1 |
| Дозатор сыпучих материалов | 1990 |
|
SU1765713A1 |
| СКБ ЦМА | 1973 |
|
SU387223A1 |
| Автоматический цифровой измеритель коэффициента гармоник | 1980 |
|
SU911363A1 |
| Цифровое устройство управления весовым дозированием | 1984 |
|
SU1167440A1 |
(
