;СО IKD |СО ICO QO
Изобретение относится к весоизмери- те. 1ьиой технике.
Це. ь изобретенияпог ышеиие точности.
На чертеже представлена блок-схема до- зато)а.
Дозатор содержит силоиз.мерительные датчики I, на которых установлен грузо- нрие.мный бункер 2, измерительный блок 3 в составе усилителя 4 и аналою-цифрового нреобразователя 5, нервый, второй и третий з лементы И 6--8, первый реверсный счет ппч 9, четвертый элемент И 10, второй реверсивный счетчик II, пятый эле.мент И 12, третий регистр 13 памяти, п естой элемент И 14, первый регистор 15 памяти, нуль-индикатор 16, задатчик 7, второй узел 18 сравнения, блок 19 управления, седьмой элемент И 20, у.мпожитель 21, сумматор 22, первый узел 23 сравнения, восьмой и девятый элементы И 24 и 25, счетчик 26, второй регистр 27 памяти, грузы 28 известной величины и э.текчро- магниты 29.
Принцип действия дозатора .заключаскн в то.м, что нелинейная функция iipeo6)a:() валия аппроксимируется кусочно-линеЙ1)й функцией таким образом, что погрен1ност1 к) от нелинейности можно пренебречь с требч с- мой для из.мерепия точностью. В.1ияние нг стационарности функции преобразовании па гочност) и.з.1е|)епия уст |)аняет ся за сче 1 оперативной ее аппрокси.мации в каждом цик.те дозирования.
Функцию преобразования весоизмери- кмьного устройства можно разбить на участ- K:i. li пределах которых ее с любой точное ) можпс; считать линейной. Тогда (fiyiiK- кия преобразо.вания может быть представ.че- ч: i iiiMo
Г ../.Р,(1)
; .:. В1)1ходной сигна.|;
входное воздействие;
параметры функции преобразовапня весоизмерительного устройства;
номер участка.
11 ч ..д непне параметров о и 6 под влия- I HCvi 1,а|)иации впешних условий, а также от нромеппого дрейфа характеристик отдельных -J. 1C ментов яв.;1яется источником статических по| рен1постей весоизмерительного устройства. 1ри этом изменение параметра а обус- .тавливает аддитивную составляющую по- гренпюсти, а изменение параметра b му. 1ьтин;|икативную. Влияние параметров а н /; отдельных участков функции преобразования на точность измерения установлено в нред.пагаемом дозаторе за счет устройства автокоррекции, реализующего специальный алгоритм фупкцион 1рования дозатора.
Дозатор работает следуюп1им об)азом. В начальный момент два груза 28 из весгной ве,тичипы / D с по.мощью электро0
5
0
.машитов 29 фиксируются на бункере 1. В регистр 27 записывается величина / , счетчики 9, 11, 26 и регистры 13 и 15 памяти приводятся в исходное состояние, на задат- чике 17 выставляется задание на дозу материала Аи..
Датчик 1 воспринимают вес бункера 2Р(У и грузов 28 РО . Сигнал V через уси- .титель 4 и анало1 0-цифровой преобразователь 5 поступает с датчиков 1 на в.ход реве)сивного счетчика 9, который но сигна. П с блока 19 управления устанавливается в на 1равлении сложения. Одновременно в )е- версивный счетчик 1 I из регистра 27 ь амяти поступает значение Рц. Остальнь е э. 1еме(г;ы схемы на время нервого измерения з;1кпыт1 1.
По окончании первого измерения но сигналу с б.тока 19 управления отключаются электромагниты 29, бункер 2 опмк к ждаг тся от грузов 28. Ре1 ерси15ный счетчик 9 ycia- навливается и паправлепин вь; |ита;|.1я, от- к)ьи5ак)тся регистрь 13 и 15 памяти. Ч- .ультат I : вт орого измерения собственно d iicra пч пксра 2Гс нос i iiai-1 и |к-| истры : . 15 памя и. ч счегчик .. 1 аким образом, н счетчике 9 n(j (окончании второго измере- 1П1Я oкaзiJiвaeтcя записаиой ве.тичина I l :. а к рс1ист)ах 13 и 15 па.мяш .
Поскольку и.мерения V. и 1- огстоя: .1) or дру -а на относительно небо,1ыную 15е. 1ичину, то участок характеристики датчиков между ними .можно считать л иней- пьгм с (i точностью. Таким o6pa30N; сн|)анед,тивы соотнопюния
Р
.
ui-f/ i +РТ 1 при РТ Л|,
(2) 1,3) (41 (5)
5
0
5
где /- ,, значение .acci.. ло:-.;
|)уе МО го м а тер иа.та.
Из ()Н1ения (4) с.тедует, что I l I j пропорциона.чьна чувствительности весоиз.мерительного устройст1ш на д;:1п-о : участке функции преобразования.
По окончании второго измерения по сигналу с блока 19 уг1равле1тя начинается .имение содержи.мого реверсивного счетчика 1 1 (Р||) на содержимое счетчика 9 ll i Г. i. Деление ведется методо.м пос.чедова е.Пгного вычитания до прихода в блок 19 сигнала с нуль-индикатора 16 реверсивного счегчн- ка 11. Резу.тьтат деления Poll ; Г;;) черс- эле.мент И 20 поступает в множитс.тьныи э.чемент 21 и записывается в не.м в качест ве множителя.
Затем по сигналу с блока 19 управления открывается затвор расходного бункера (не показан) и начинается истечение доз:;- руемого материа.та в бункер 2.
Третье измерение l :j веса бункера 2 и дозируемого материа;1а /% через открытые э. Ц менты И 7 н 8 .ишоснтся в ревер- сиан)1Й счетчик М, станов.тенный в наппавлении сложения, и регистр 15 памяти. По окончании третьего измерения по команде с блока 19 управления счетчик И устанавливается в направлении вычитания, открывается элемент И 12 и в счетчик II из регистра 13 памяти поступает число 1/2.
1 аким число
образом
в счетчике 1 1 фиксируется
V
(6)
которое поступает в .множительный элемент 21 в качестве .множимого. В-результате умножения на выход множительного элемента 21 поступает число
РТ
(7)
которое в узле 23 сравнения сравнивается с содержимым регистра 27 па.мяти (Ро). Кроме того, значение Р через сумматор 22 поступает па вход узла 18 сравнения, где сравнивается с задаиие.м Рлз.
Если (i: , процесс из.мерения }5еса текуплей дозы материала повторяется.
В момент, когда Яр станет равным Р.Рп из узла 23 сравнения в блок 19 управления поступает сигнал об окончании первого линейного участка функции преобразования. По это. -гу сигь-алу начинается определение нового коэффициента чувствите.льности /}. Значение Pi с выхода множительного элемента 21 через элемент И 25 заносится в счетчик 26, а соответствующее ему V:, из регистра памяти 15 через элемент И 14 заносится в регистор 13 памяти в качестве измерения l ;д;lя нового линейного участка. В предварительно очищенный реверсив- н.ый счетчик 11 из регистра 27 памяти заносится значение Я.
Для определения коэффициента чувствительности на короткое время включаются :)лектрома|-ниты 29. Грузы 28 фиксирук тся на бункере 1 и результат измерения заносится в предвари e. ibno очищенный счетчик 9 в направ.. 1епии с.южепия. Затем электро.магпи- ты 29 отк; ючаются и результат нового и:5мерепия поступает в счетчик 9, устапов- .КМП1ЫЙ в напра.влении вычитапия. По окон- ча.;ии перечне,leiiiibix процессов в счетчике 9 ) с гся рачпость
Р .(«)
причем с ч; )ажейИЯ
i ij oi точностью справедливы
(Pf -
, I + PT
, А,
(9) (10)
Г1; .команде с блока 19 управления на- чипаегся деление содержимого счетчика 1 I (fo) на содержимое счетчика 9 (AV). .льтат де.ления заносится в множительный э, 21 в качестве множителя.
0
5
0
Затем в реверсивный счетчик 11 поступает измерение (Ю), из которого вычи- гается содержимое регистра 13 памяти V-2 (9). Полученная разность поступает на вход множительного элемента 21, па выходе которого после умножения фиксируется чис.чо
(V-, -, Р.(II)
Значение Р сравнивается в узле 23 сравнения с РО, а также поступает на сум.ма- тор 22, где суммируется с Р, поступающим на второй вход сумматора 22 из счет чика 26. Таки.м образом, на выходе сумматора 22 фиксируется вес текущей дозы материала Р Р, -г РГ , который сравппвается с заданием.
В случае, когда / P|i и Р з измерение веса текущей дозы повторяется.
В момент равенства / и Л) повторяется процесс определения параметров следующего участка функции преобразования весоизмерительного устройства.
В момент равенства f и P.w подается команда на закрытие затвора расходного бункера.
0
5
0
5
0
5
5
Формула изобретения
Весовой порционный дозатор, содержащий силоизмерительные датчики, на которые установлен грузоприемный бункер и которые подключены через усилитель к входу анало- гоцифрового преобразователя, задатчик, умножитель, выход которого подключен к первому входу первого узла сравнения, nepBijiii и второй реверсивные счетчики, первый и второй регистры памяти, блок управления п электромагниты для поднятия грузов известной величины, подключенные к блоку управления, отличающийся тем, что, с целью повышения точности, в него введены девять элементов И, третий регистр па.мяти, второй узел сравнения, сумматор, счетчик и нуль-индикатор, причем выход аналого-циф рового преобразовате,-|я подключен к первым входам первого, второго и третьего э,1ементов I. вторые входы всех элементов П соединены с одними выходами блока управле.чия, другие 1 1 1ход| 1 к()тор(лч} соед.ипепы соответственно с уп)ав. 1Я1ощи.мп входами первого п второго реверспвь ых счетчиков и первого регистра па.мятп, выход первого э,пемента П подключеп к счетному входу первого реверсивного счетчика, выход которого подключен к первому входу четвертого элемента И, соединенного своим выходом с упраи ляющим входом второго реверсивного счетчика, счетный вход которого соединен с выходом второго элемента М, а выход - с вхп дом . 1Ь-ипд11катора и вт();)ым входом умножителя, первый вход которого соединен с выходом )о э.кпзоьпа И, а выход с нервыми входа- :.и счмматора п девятого элемента ii. B.,.I которого 4ejie:i счетчик
5 1432339
соединен с вторым входом сумматора, выходседьмого элемента И соединены с соответкоторого и выход задатчика подключены кствующими управляющими входами второго
входам второго узла сравнения, выход тре-реверсивного счетчика, выход второго регисттьего элемента И подключен к счетному вхо-ра памяти подключен к первому входу восьду первого регистра памяти, выход которого5 мого элемента И второму входу первого
подключен к первому входу шестого эле-узла сравнения, выход которого подключен к
мента И, выход которого через третий ре-одному входу блока управления, другой вход
гистр памяти соединен с первым входом ни-которого соединен с выходом нуль-индикатотого элемента И, выход которого и выходра.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЕСОВОЙ ПОРЦИОННЫЙ ДОЗАТОР | 1971 |
|
SU422971A1 |
| Устройство для воспроизведения переменных во времени коэффициентов | 1981 |
|
SU1005087A1 |
| Устройство для автоматическойпОгРузКи СыпучиХ гРузОВ ВдВижущиЕСя ТРАНСпОРТНыЕ СРЕдСТВА | 1978 |
|
SU806579A1 |
| Устройство для воспроизведения переменных во времени коэффициентов | 1980 |
|
SU894737A1 |
| Устройство управления весовым порционным дозированием сыпучих материалов | 1982 |
|
SU1064152A1 |
| Дискретный умножитель частоты | 1978 |
|
SU782140A1 |
| Цифровое устройство управление весовым дозированием | 1980 |
|
SU866418A1 |
| Вычислительное устройство | 1982 |
|
SU1040493A1 |
| Множительное устройство | 1978 |
|
SU752335A1 |
| Устройство для динамического взвешивания | 1983 |
|
SU1137330A1 |
изобретение относится к весоизмерительной технике и позволяет повысипь точность дозатора. Грузоподъемный бупкер 2 установлен на силоизмерительные датчики 1, которые подключены через усилитель 4 и аналого-цифровой преобразователь 5 к схеме измерения и управления. Последний содержит девять логических элементов и, реверсивные счетчики 9 и 11. три регистра памяти 13, 15 и 27, счетчик 26. умножитель 21, задатчик 17, узлы сравнения 18 и 23, блок управления 19. С помощью э,ек- тромагнитов 29 перед набором дозы и в процессе ее набора производится нрисоединешн- грузов 28 к бункеру 2 для уточнения 1-;змо- рительной характеристики системы и внесения соответствующей коррекцин. I и.-i.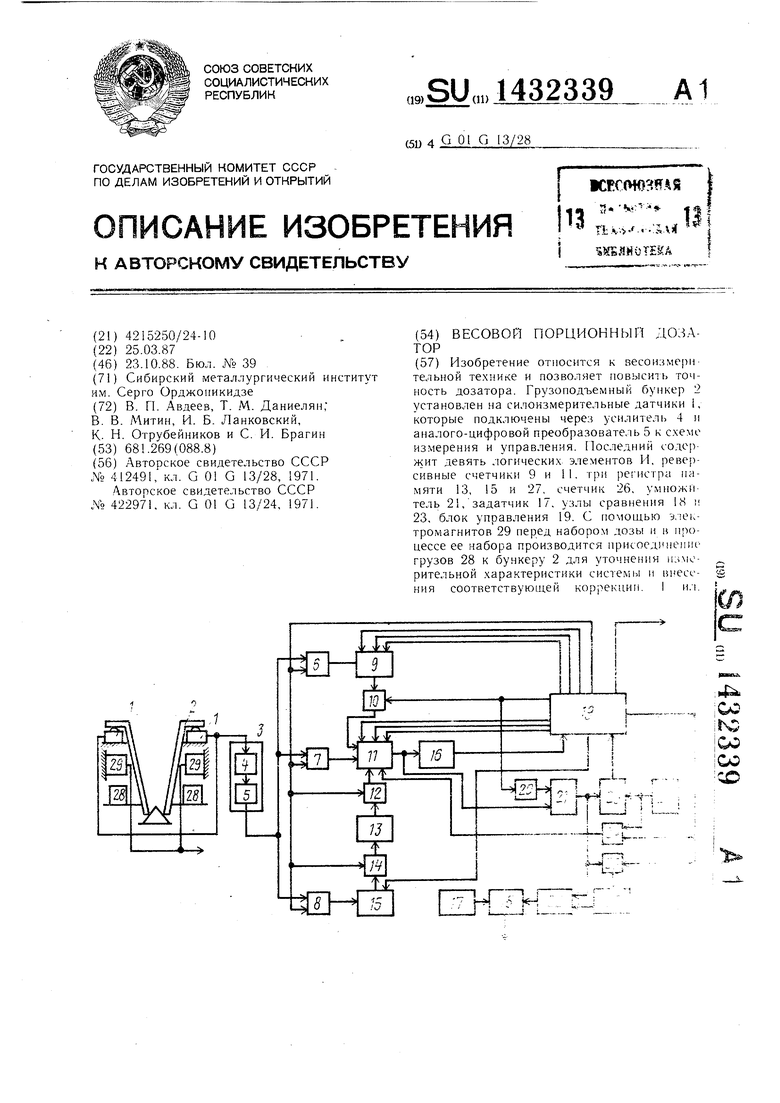

| Счетная машина | 1934 |
|
SU41249A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| ВЕСОВОЙ ПОРЦИОННЫЙ ДОЗАТОР | 1971 |
|
SU422971A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
