1
Изобретение относится к области автоматизации нроцессов в нромышленности и сельском хозяйстве и нризвано обеспечить автоматическое управление конвейерами, например навозоуборочнылш продольными и нонеречными, совершающими круговое илн возвратиопостуиательное движение.
Кроме того, изобретение может быть использовано там, где с помощью конвейерных механизмов производят унорядоченный сбор какого-либо материала из удаленных технологических участков (зон), нерегрузку и нодачу его в зону наконления (емкость, бурт, склад), в частности может быть иснользова.но иа крупных животноводческих комплексах, где находят применение подобные конвейерные установки, например навозоуборочные транспортеры типа ТС-1 или ТСК-2.
Известны устройства, автоматически управляющие работой одного или двух конвейеров, например навозоуборочных продольных и поперечных, содержащие программные реле времени, переключатели режима работы, контакторы и конечные выключатели.
Однако известные устройства предназначены для управления одиночными конвейерными установками, в то время как технологическая схема транспортировки материала (например, навоз на свинооткормочных комнлексах) может иметь в своем составе группу
11родоль; ых новозоуборошых конвейеров, располо хенных попарпо в кaждo } отделении cвинoкo iплeкca блочного типа, и поперечный конвейер, с помощью которого ма/ориал подают в хранплище. Иоэтому известные устройства не могут бьггь нснользовапы для управления группой копвейеров. осущоствляюгднх сбор, перегрузку и иодачу мате|Л а,1а пз удаленных зон в зону пакоплеш я.
Целью изобретения является разработка ус ipojiCTBa для ;;В1Ч);ат чес;;о;о управления копвсйе|) (пипрп :ер, навозоуборочнымп продольными и поперечнымп), обеспечивающего общс-с увслпчеппс надежности и улучшепие условп работы пуско-защитно аппаратуры па питающей трансфор иаторпой подстанции.
Это достигается введением централпзовапifCTO автоматичеекого управления с сохранеiii-ieM управлепия по мосту сгаповк мехаппзмов. но при взан-iiiOii блокировании органов управления, кнопок, ту: бл:ров. пропзьодством ступенчатого запуска конвейеров в работу малызп; rpyiniaMH п только с движеппя «Назад. Прп этом г.опечпыо вьп ;по-1ателп в цепях катукчек магиптпых пускателей об)атпого хода продольных копвеГюров соедипепы чергз переключатели режп.ма работы с замыкающимися с выло 1ЖкоГ1 вромспи конпактами размнож ггеля сигналов, включаемого от реле времени с суточной программон, причем магнитный пускатель обратного хода поперечного конвейера задействован от второй программы реле времени с суточной программой.
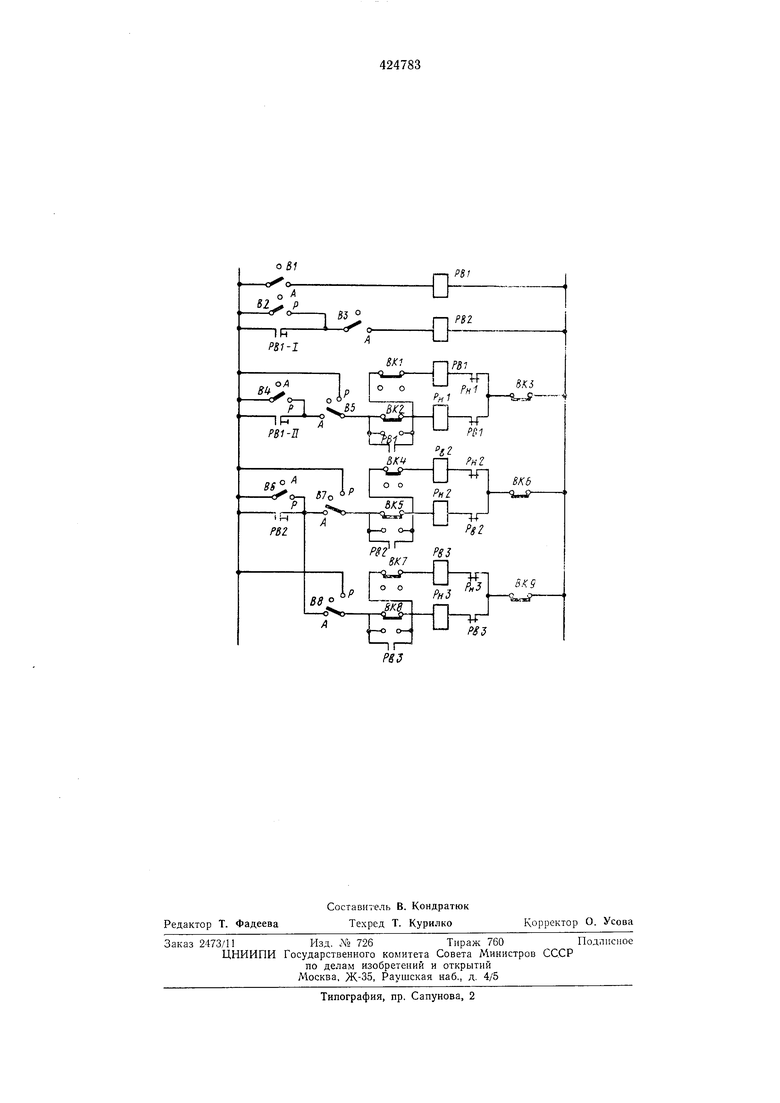
На чертеже изображена принципиальная электрическая схема автоматического управления конвейерами, в частности двумя продольными и одним поперечным.
Электрическая схема управления устройства содерн :ит программное реле времени РВ1, например тина 2 РВМ, размножитель сигналов РВ2, например типа ВС-10, выключатели ноложепия В1-В8, реверсивные магнитные пускатели Рв1-Р,,, Рв2-Рп2; РвЗ-Р„3 и копечные выключатели ВК1-ВК9.
Электрическая схема работает следующим образом. В заданное программой время срабатывает реле времени РВ1, которое замыкающими контактами РВ1 - II подает напряжение на обмотку магнитного пускателя хода «Назад поперечного конвейера. Включение его осуществляется по второй программе. Первая программа реле РВ1 через установленное время включает размножитель сигналов РВ2. Реле РВ2 последовательпо с выдержкой времени осуществляет пуск продольных конвейеров посредством подачи напряжения в цели магнитных пускателей Рп2, РцЗ и т. д. По истечении времени, определяемого скоростью перемещения рабочих органов конвейеров и величипой установленного рабочего хода, при нажатии на коицевые вь1ключатели ВК5 и ВК8 происходит реверсирование приводов конвейеров.
Таким образом, продольные и поперечные конвейеры будут соверщать возвратно-поступательное движение до тех пор, пока реле времени РВ1 не разомкнет евои контакты в цепи питания реле РВ2. При этом одновременно останавливаются все продольные конвейеры. Так как приводом поперечного конвейера управляет отдельная программа, он еще некоторое время будет работать. Когда реле времени РВ1 разомкиет свои контакты РВ1-П в цепи реверсивного магнитного пускания (Рв1-РП) для управления приводом иоперечного конвейера, произойдет его остановка.
г-г
Предмет изооретения
Устройство для автоматического управления конвейерами, например навозоуборочными продольными и поперечными, содержащее
программное реле времени, переключатели режима работы, контакторы и конечные выключатели, отличающееся тем, что, с целью повыщения надежности и улучщения условий работы пуско-защитной аппаратуры
на питающей трансформаторной подстанции, конечные выключатели в цепях катущек магнитных пускателей обратного хода продольных копвейеров соединены через переключатели режима работы с замыкающимися с выдержкой времени контактами размножителя сигналов, включаемого от реле времени с суточной программой, причем магнитный пускатель обратного хода поперечного конвейера задействован от второй программы реле времени с суточной программой.