Настоящее изобретение относится к области электрифицированных машин-орудий и представляет собой дальнейшее развитие идей сращивания электрического двигателя с приводимым им механизмом.
В подобной электрифицированной машине рабочие или другие органы, частично или целиком, являются одновременно элементами электродвигателя.
Указанная идея в данном случае нашла выражение в том, что для приведения во вращение машин-орудий применен статор асинхронного двигателя, выполненный в виде кругового сегмента, снабженного преимущественно обмоткой с неявно выраженными полюсами, и устроенный приставным к приводимой части машины орудия, которая является ротором такого электрифицированного механизма.
Число оборотов ротора фактически может быть любым и зависит от длины дугового статора по отношению к окружности ротора.
Выполнение статора в виде открывающейся, приставляющейся или накладывающейся части полной окружности делает возможным установку такого статора в любом месте вокруг какого-либо цилиндрического рабочего органа производственной машины и превращение последнего тем самым в ротор электродвигателя. Кроме того и самый статор в новой своей форме может для многих производственных машин быть заодно выполнен как рабочий орган этих машин (например, частично или целиком в виде крышки, предохраняющей перерабатываемый полуфабрикат или сырье от разбрасывания; в виде открывающегося люка для осмотра некоторых элементов машины и т.д.). Подобному комбинированному выполнению машины и для производственных и для электродвигательных функций способствует также то обстоятельство в новом приводе, что он может быть исполнен на любую скорость с достаточно приемлемыми при этом рабочими характеристиками. Понятно, что указанное комбинированное исполнение машины избавляет ее от передач, от добавочного веса и объема двигателя, от некоторых гнезд трения и механических деталей, ибо двигатель в той форме, в которой он может быть спроектирован в машине на основе дугового статора, может не иметь ни своей станины, ни вала, ни крышек, ни подшипников, ни передач, ни даже своего ротора, ни наконец, статора в полном и обычном смысле этого слова, поскольку и этот статор при новой его форме может в некоторых случаях в той или иной мере нести те или другие производственные функции, обычные для какого-либо рабочего органа машины.
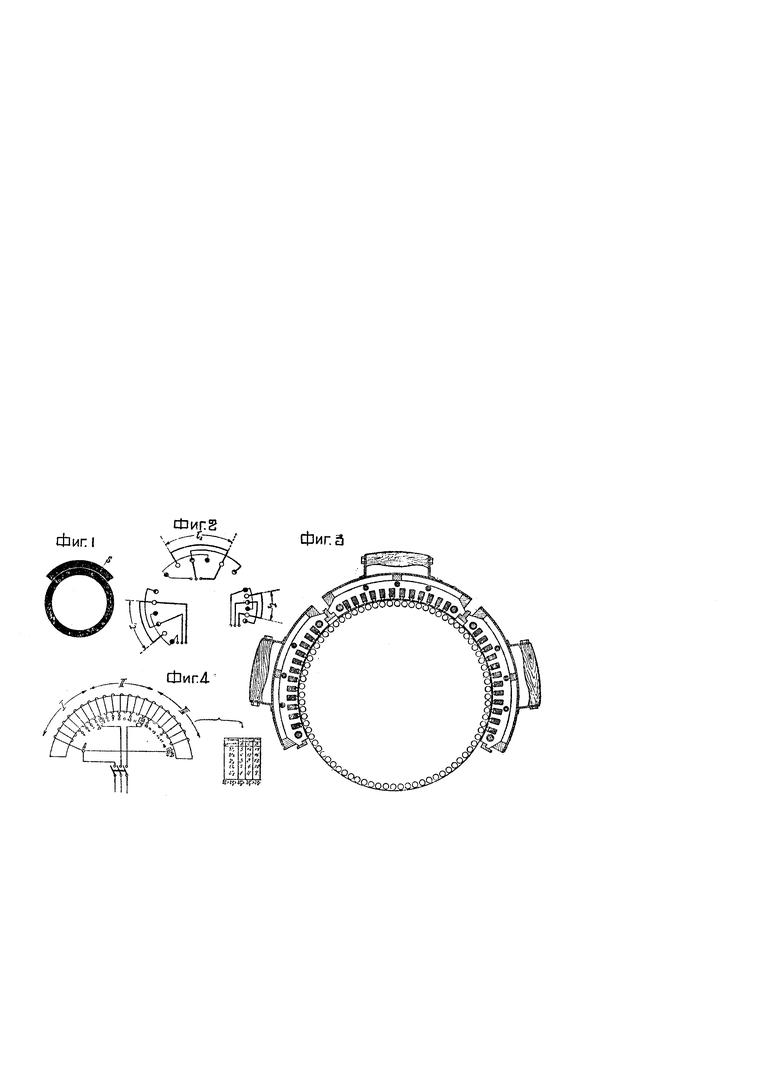
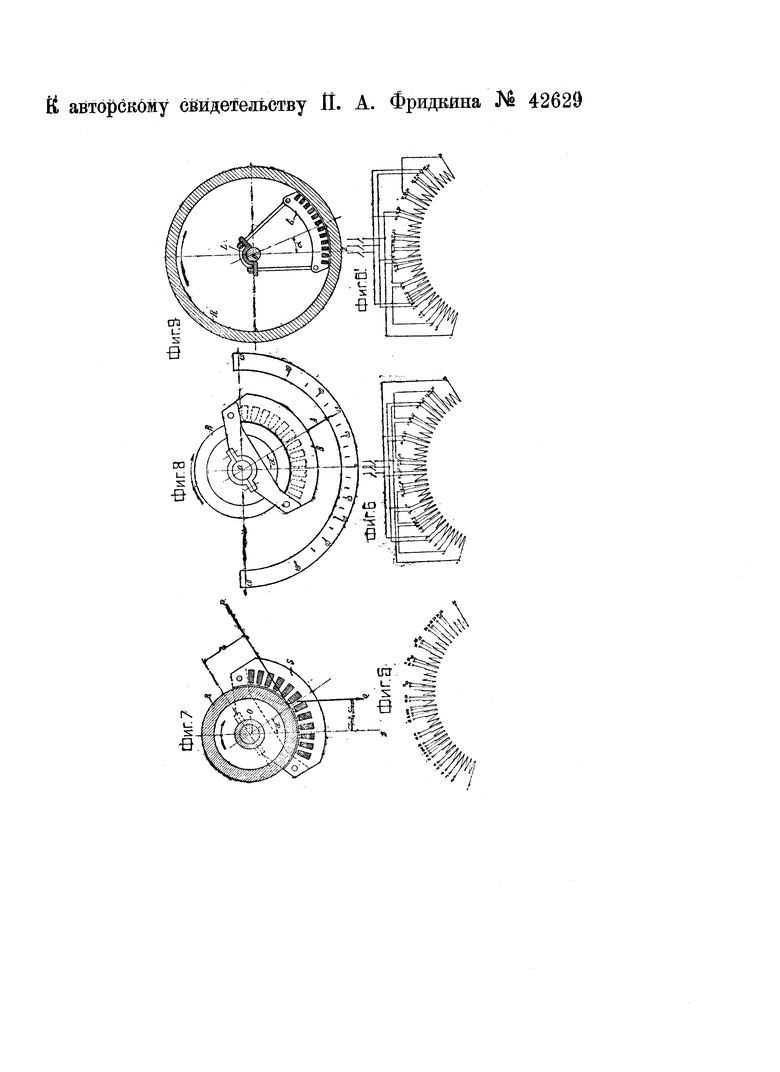
На чертеже фиг. 1 изображает схематически предлагаемое устройство; фиг. 2- электрическую схему нескольких дуговых статоров, расположенных по окружности одного ротора; фиг. 3 - конструктивное выполнение устройства с несколькими дуговыми статорами; фиг. 4, 5, 6 и 6′ - электрические схемы обмотки статора с регулированием числа оборотов приводимого устройства; фиг. 7, 8, 9 - динамометр для вращающихся агрегатов, выполненный по принципу предложенного устройства.
Как видно из изображенной на фиг. 1 схемы, статор S занимает лишь часть окружности ротора, причем длина дуги при заданном ее диаметре будет определяться требуемым числом оборотов привода, работающего по принципу асинхронного или синхронного двигателя.
Так, при обычной для наших электрических сетей частоте ƒ=50 Hz диаметре дуги статора, например, в 20 см и требующемся синхронном числе об|мин 2000, необходимое полюсное деление получается равным

Такой статор должен будет иметь дугу длиной около 42 см, т.е. приблизительно  целой окружности. Для взятого частного случая число пар полюсных делений статора не может превышать одной, но в самом общем случае рассматриваемое здесь число или, что то же, число обмоточных катушек на фазу может выбираться при дуговом статоре для каждой данной машины в пределах
целой окружности. Для взятого частного случая число пар полюсных делений статора не может превышать одной, но в самом общем случае рассматриваемое здесь число или, что то же, число обмоточных катушек на фазу может выбираться при дуговом статоре для каждой данной машины в пределах
 ,
,
где n - синхронная скорость электродвигателя, а K - ближайшее меньшее целое число. Двигатель, например, на 350 синхронных об/мин может иметь при  т.е. восемь и менее (вплоть до единицы) пар полюсных делений.
т.е. восемь и менее (вплоть до единицы) пар полюсных делений.
Возможно осуществить ступенчатую регулировку скорости привода с дуговым статором, что пояснено на фиг. 2, где схематически показаны на одном дуговом статоре три смежных обмотки- каждая со своим полюсным делением. Включая в отдельности эти три обмотки, т.е. включая отдельные дуговые участки статора, можно получить от такого привода следующие три скорости (при одной и той же, конечно, частоте):
причем эти скорости могут быть совершенно произвольными (например, 1120; 1035; 880). Понятно, что рассматриваемые здесь ступени скорости являются добавочными в новом приводе к тем ступеням скорости, которые возможно от него еще получить несколькими обмотками в общих пазах статора.
Максимум указанных добавочных ступеней скорости, которые могут быть получены для данного привода, подчиняется условию:
т.е. общая длина всех m дуговых участков статора, на каждом из которых размещается по паре полюсных делений отдельных m обмоток, не может превышать длины πD полной окружности статора. Отсюда понятно, что число отдельных обмоток, оно же число добавочных ступеней скорости, может быть получено тем большим, чем больше диаметр статора и чем меньшие скорости заключены во всей шкале добавочных ступеней скорости, на которые проектируется привод. Понятно, что к последнему применимы также все те прочие методы регулирования скорости, которые являются обычными для существующих электродвигателей.
Путем различных комбинаций обмоток и дуговых статоров возможно также осуществить ступенчатую регулировку номинальной мощности привода с дуговым статором, что дает возможность получать наивыгоднейшие условия работы в отношении коэффициента мощности.
На фиг. 3 - представлена конструктивное выполнение привода с несколькими дуговыми статорами.
Регулирование скорости можно производить и более плавно, чем это указано выше, путем изменения полюсного деления. Для этого надлежит обмотку дугового статора выполнить по типу обмоток кольца Грамма и соединить ряд секций последней с пластинами коммутатора, на котором установлены щетки, приключенные к трехфазной сети.
Подобная обмотка на дуговом статоре дает возможность осуществлять временное полюсное деление, а вместе этим и переменную синхронную скорость как при соединении фаз статора треугольником (фиг. 4), так и при соединении их звездой (фиг. 5 и 6). В последнем случае необходимы другие, чем при треугольнике, соединения секций обмотки.
Как показано на фиг. 4, ответвления приключены к пластинам 1, 2, 3, 4, 5 … 19 коммутатора. По этим пластинам могут передвигаться три щетки В, С и D. Начало и конец обмотки электрически соединены между собой.
Провода сети подводятся: один - к началу обмотки в точке А (или что то же к концу обмотки), второй - к точке В, третий - к точке С, благодаря чему обмотка статора оказывается соединенной треугольником.
На чертеже подвижные щетки В, С, D показаны занимающими соответственно пластины 5, 12 и 19 на коммутаторе.
Если эти щетки передвинуть таким образом, что щетка В окажется на 4-й, С - на 10-й и D - на 16-й, то полюсное деление уменьшится, а вместе с этим уменьшится и синхронная скорость машины. Третья еще меньшая скорость может быть получена, например, от машины таким положением щеток на коммутаторе:
В-3, С-8, D-13.
Во всех этих положениях щетки осуществляют соединение обмотки треугольником, сохраняя этот треугольник равносторонним.
Для соединения на звезду схема выполняется как показано на фиг. 5 и 6, где представлена общая схема статора с его ответвлениями к пластинам 1, 2, 3, 4 … 36 переключателя, и на фиг. 6 - соединения отдельных секций статора для осуществления минимального полюсного деления, т.е. минимальной синхронной скорости ротора; фиг. 6′ дает схему для более высокой синхронной скорости.
Как на пример применения привода с дуговым статором можно указать на электровоз, в котором дуговой статор располагается в непосредственной близости к ободу колеса повозки, служащего короткозамкнутым ротором. Для усиления вращающего момента в ободе колеса могут быть заложены замкнутые по торцам медные стержни.
Всякий электровоз должен давать сцепление колес с рельсами, достаточное для каждой данной силы тяги. Это сцепление, характеризующееся при прочих равных условиях нагрузкой на ось, должно быть тем выше, чем мощнее электровоз. Нет однако смысла иметь эту нагрузку на оси у данного локомотива постоянно большой и из-за этого оказаться перед неизбежностью либо усиления мостов и рельсового полотна, либо ограничения района действия электровоза. Весьма существенна такая переменная нагрузка на ось, которая всегда соответствовала бы силе тяги. Такая регулируемая нагрузка на ось может быть создана несколькими развернутыми, т.е. прямолинейными статорами электровоза, установленными с необходимым зазором над рельсами.
Магнитный поток, возбужденный током обмотки такого статора, нависающего над рельсом, притянет рельс и электровоз друг к другу с определенной силой. Абсолютное значение этой силы магнитного притяжения, вызываемого таким статором, может легко регулироваться величиной магнитного потока статора и магнитной индукции в зазоре (изменением, например, числа включенных витков обмотки). Обмотка таких статоров может проектироваться либо исключительно для целей регулирования давления на ось (и в этом случае сечение такой обмотки будет сравнительно мало), либо также заодно и для создания прямолинейными статорами в необходимых случаях (подъемы, трогание с места) некоторой добавочной силы тяги в пределах, например, 5-15% силы тяги, даваемой дуговыми статорами над ободами скатов.
В последнем случае прямолинейные статоры (вернее первичные органы) должны проектироваться не только для функций магнитного тяжения, но также и для прерывистой работы в качестве маломощных добавочных асинхронных электродвигателей с рельсами в качестве массивных короткозамкнутых вторичных контуров.
Предлагаемое устройство может быть применено в качестве электродинамометра для измерения момента сопротивления машин-орудий.
В этом случае статор S приставляется к органу R производственной машины.
В данном случае статор делается подвижным относительно этого органа (статор может поворачиваться вокруг оси О, являющейся одновременно и осью вращения вращающегося органа R). Необходимый зазор между активными поверхностями статора и ротора достигается при этом опорными вкладышами, либо роликами, прикрепленными к телу статора, либо подвеской статора (фиг. 9), либо соответствующими другими способами.
Пока статор S не включен, он будет оставаться в отвесном положении, из которого, однако, выйдет, как только он будет включен в цепь многофазного тока. Пусть направление вращения рабочего органа происходит по часовой стрелке. Силой электродвигательной реакции активной поверхности ротора R на активную поверхность статора S он будет отклонен в сторону, обратную направлению движения ротора (фиг. 7 и 8). Рассматривая это состояние системы, как состояние равновесия, имеем для него уравнение:
Pr1-Qr2 sin α=0.
Здесь (фиг. 7):
Р - окружная сила реакции активной поверхности вращающегося органа на статор;
r1 - плечо этой силы, равное радиусу активной поверхности ротора;
Q - вес дугового статора;
r2 - расстояние центра тяжести дугового статора от оси вращения О;
α - угол, образуемый осью OZ с радиусом, проведенным через центр тяжести дугового статора, а произведение r2 sin α есть плечо силы Q.
Общий физический смысл написанного уравнения таков: момент, создаваемый силой реакции и действующий на статор в одном направлении (во взятом случае - против часовой стрелки), уравновешивается обратно действующим моментом силы тяжести статора, и этот момент пропорционален синусу угла отклонения статора от своего отвесного положения.
Но момент Pr1 силы реакции равен по абсолютной своей величине и по знаку моменту сопротивления рабочей машины, преодолеваемому дуговым статором, что и позволяет определить необходимый рабочий момент для данной производственной машины.
Фиг. 8 схематически изображает такой динамометр. Стрелка А укрепляется на дуговом статоре S таким образом, что ось этой стрелки находится в плоскости, перпендикулярной к дуге статора и проходящей через его центр тяжести. Неподвижная шкала прибора, как понятно из приведенной выше формулы, - синусоидальна. В каждом данном случае шкала может быть также дана для непосредственных отсчетов момента. В этом случае значения sin α должны быть увеличены в Qr раз, и эта величина будет постоянной для каждого данного прибора.
Измеряя одновременно с моментом сопротивления рабочей машины и скорость ее приводного вала, можно определить мощность на валу этой машины.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПРИВЕДЕНИЯ ВО ВРАЩЕНИЕ МАШИН-ОРУДИЙ | 1935 |
|
SU48766A1 |
| Трехфазная коллекторная машина | 1932 |
|
SU37186A1 |
| Электрическое устройство для вращения машин-орудий | 1935 |
|
SU48765A1 |
| МНОГОФАЗНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА | 1992 |
|
RU2065243C1 |
| Асинхронное мотор-колесо с повышенным магнитным сцеплением | 2018 |
|
RU2706669C1 |
| СИНХРОННЫЙ ДВИГАТЕЛЬ С ЭЛЕКТРОМАГНИТНОЙ РЕДУКЦИЕЙ | 1995 |
|
RU2076433C1 |
| Однофазный асинхронный двигатель с фазным ротором | 2024 |
|
RU2840896C1 |
| ТОРЦОВЫЙ ЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА ИНДУКТОРНОГО ТИПА | 2003 |
|
RU2286643C2 |
| Устройство для приведения во вращение машин-орудий | 1936 |
|
SU48767A1 |
| ЭЛЕКТРОПРИВОД ДЛЯ ВЕРТИКАЛЬНОГО ПЕРЕМЕЩЕНИЯ РЕГУЛИРУЮЩЕГО ОРГАНА | 2013 |
|
RU2533177C1 |
1. Устройство для приведения во вращение машин-орудий, отличающееся тем, что оно представляет собою статор асинхронного двигателя, выполненный в виде кругового сегмента, снабженного преимущественно обмоткой с неявно выраженными полюсами, и устроенный приставным к приводимой части машины орудия.
2. В устройстве по п. 1 применение статора, отличающегося тем, что на нем размещено несколько смежных обмоток указанного типа, но с различной величины полюсными делениями, с целью получения различных скоростей.
3. При устройстве по пп. 1 и 2 применение в качестве ротора вращающегося рабочего или трансмиссионного цилиндрического органа машины.
4. В устройстве по пп. 1 и 2 применение нескольких статорных обмоток указанного типа, или статоров с подобными обмотками, с целью допустить возможность, используя лишь часть обмоток, вести работу не на полной мощности двигателя.
5. В устройстве по п. 1 применение, с целью изменения полюсного деления, секционированной обмотки статора, выполненной по типу обмотки Грамма и соединенной с пластинами коммутатора, на котором установлены щетки, приключенные к трехфазной сети и соединяющие отдельные фазы обмотки а треугольник или в звезду.
6. Применение устройства по п. 1 в качестве двигателя для электровоза, для чего круговой сегмент расположен в непосредственной близости к ободу колеса повозки, служащего короткозамкнутым ротором.
7. Применение устройства по п. 1 в электровозе, с целью увеличения сцепления с рельсами, для чего указанное устройство, развернутое на плоскость, расположено над рельсами, служащими вторичной системой двигателя.
8. Форма выполнения устройства по п. 1, в случае использования в качестве динамометра для вращающихся агрегатов, отличающаяся тем, что круговой сегмент S устройства поворотно подвешен к оси О используемого агрегата в непосредственной близости к его вращающейся части R и снабжен указателем для отсчета определяемой мощности по углам отклонения сегмента от его положения, принятого за исходное.
