Предлагаемое техническое решение относится к области электротехники и может быть использовано в качестве электропривода, в частности в системах автоматического управления положением и перемещением регулирующего органа (РО) ядерного реактора.
Известен электропривод для перемещения регулирующего органа ядерного реактора, содержащий синхронную машину (шаговый двигатель) с многофазной обмоткой на статоре и магнитоэлектрическим индуктором на роторе, механическое устройство, предназначенное для передачи вращающего момента от веса регулирующего органа на вал ротора (см. а.с. СССР №350104, опубликованное в реферативном журнале «Открытия. Изобретения». 1972, №26).
Это устройство способно воспринимать момент от веса регулирующего органа в вертикальном направлении, например, посредством блока, закрепленного на валу ротора и перекинутого через блок троса, прикрепленного к регулирующему органу, или зубчатой рейки и реечной шестерни и перемещать его в вертикальном направлении. При работе синхронной машины в двигательном режиме движение регулирующего органа осуществляется вверх, а вниз - в двигательном или в генераторном режимах работы. Для ограничения скорости опускания регулирующего органа в этом устройстве применено динамическое торможение на емкостную нагрузку, подключенную к выводам несмежных фаз обмотки статора синхронной машины.
Недостатком этого электропривода является невысокая надежность, так как в случае пробоя хотя бы одного конденсатора фазы обмотки статора синхронной машины оказываются замкнутыми между собой накоротко, и она теряет работоспособность.
Известен также электропривод, содержащий синхронную машину с многофазной обмоткой на статоре, снабженной выводами эквипотенциальных точек параллельных ветвей для подключения к источнику переменного напряжения или тока и зажимами для подключения конденсаторов в одной или нескольких фазах, и ротором, на валу которого установлены зубчатый магнитопровод и магнитоэлектрический индуктор (см. а.с. СССР №1454208, МПК7 H02K 37/00, 1999 г., бюл. №32).
Работа в генераторном режиме обеспечивается за счет взаимодействия постоянных магнитов на роторе с обмоткой статора и подключения конденсаторов к эквипотенциальным точкам параллельных ветвей в фазах обмотки. Эквипотенциальные точки параллельных ветвей в фазах образованы в результате подключения к источнику одной ветви - началом обмотки, а другой ветви - концом обмотки. Благодаря такому решению повышается надежность электропривода, поскольку выход из строя (пробой) конденсаторов не влечет за собой потерю работоспособности синхронной машины.
Недостатком известного устройства является наличие на роторе синхронной машины значительного объема постоянных магнитов, которые в двигательном режиме работы в создании вращающего электромагнитного момента участия не принимают. Это приводит к увеличению массогабаритных показателей.
Наиболее близким к предлагаемому техническому решению является электропривод для вертикального перемещения регулирующего органа, который содержит зубчатый статор с многофазной обмоткой, которая образует по две параллельные ветви в каждой фазе, снабженной выводами для подключения к источнику переменного напряжения или тока и эквипотенциальных точек параллельных ветвей, и зубчатый ротор (см. патент РФ №2412519, МПК7 H02K 19/24, H02K 19/22, H02K 1/06. 2011 г., бюл. №5).
Благодаря самовозбуждению в генераторном режиме, достигаемому при определенном соединении обмоток в параллельных ветвях и соотношении активного сопротивления и индуктивных параметров обмотки, а также подключению емкостной нагрузки, синхронная машина данного электропривода способна развивать тормозной электромагнитный момент, компенсирующий момент от веса регулирующего органа, приложенного к валу ротора, и ограничивающий скорость его перемещения вниз.
Однако применение этого электропривода ограничено низким диапазоном рабочих частот вращения, поскольку ротор его синхронной машины вращается со скоростью, в Z (Z - число зубцов на роторе) раз меньшей, чем частота вращения поля, созданного обмоткой статора. Это ограничивает быстродействие. Кроме того, при движении вверх синхронная машина должна иметь достаточно большую перегрузочную способность по развиваемому моменту, особенно при пуске на высокую частоту вращения, когда к моменту от веса регулирующего органа добавляется действие инерционных масс. При движении вниз эта перегрузочная способность является избыточной, поскольку электромагнитный момент машины и момент от веса регулирующего органа направлены в одну сторону. Избыточная перегрузочная способность провоцирует дополнительные колебания при движении регулирующего органа и приводит к снижению надежности работы электропривода, так же как и недостаточная перегрузочная способность машины при движении регулирующего органа вверх.
Технической задачей является увеличение перегрузочной способности, то есть предельного электромагнитного момента при вращении ротора на подъем регулирующего органа в двигательном режиме и при вращении ротора на опускание регулирующего органа под действием собственного веса в генераторном режиме.
Решение поставленной задачи позволяет повысить надежность работы электропривода и расширить функциональные возможности и область применения электропривода.
Поставленная задача решается за счет того, что в электроприводе для вертикального перемещения регулирующего органа, содержащем зубчатый статор с равномерно распределенными зубцами и многофазной обмоткой, включающей по две параллельные ветви в каждой фазе с выводами для подключения к источнику переменного напряжения или тока, расположенный внутри статора зубчатый ротор, на валу которого размещен магнитоэлектрический индуктор, имеющий зубчатый магнитопровод, образующий по окружности ротора полюса чередующейся полярности, количество зубцов которого равно числу зубцов ротора, магнитоэлектрический индуктор установлен на валу так, что зубцы его магнитопровода смещены относительно зубцов ротора на угол, не превышающий одной четвертой части полюсного деления в направлении действия момента от веса регулирующего органа.
Введение магнитной асимметрии обеспечивает разное значение максимального электромагнитного момента в одном направлении и в противоположном направлении, приводит к перераспределению всего рабочего магнитного патока, что позволяет создать отличный от нуля пусковой момент в каждой фазе, при этом рабочий магнитный поток - поток реакции статора, замыкающийся через зубчатый магнитопровод, и вспомогательный магнитный поток - поток магнитоэлектрического индуктора, остаются симметричными, каждый под своей частью ротора.
Сущность технического решения поясняется чертежами, где:
на рис.1 показана механическая схема электропривода;
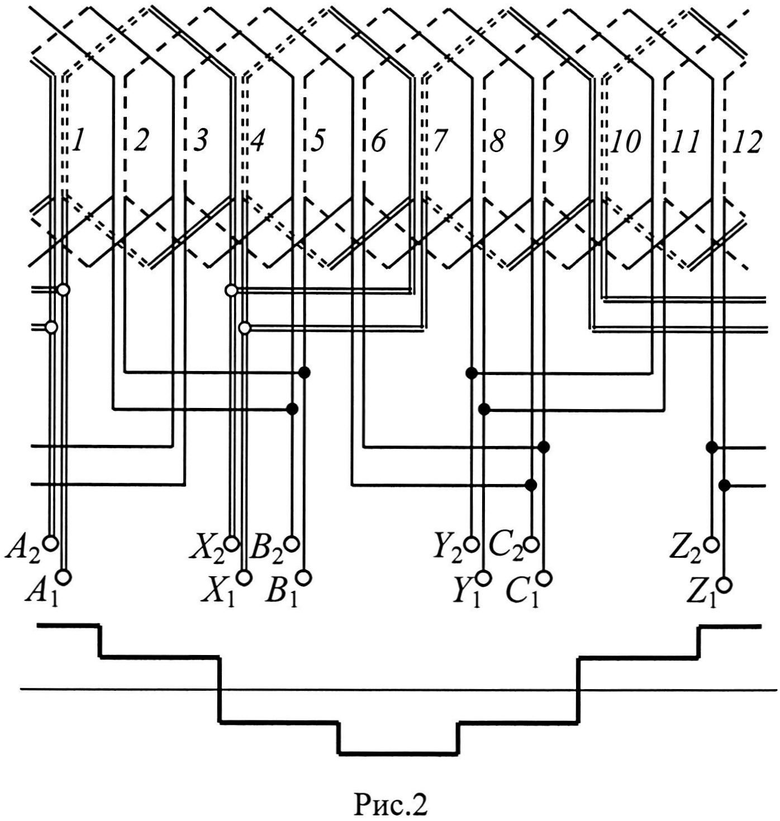
на рис.2 показана электрическая схема соединения многофазной обмотки статора электропривода и интегральная кривая создаваемой ею МДС;
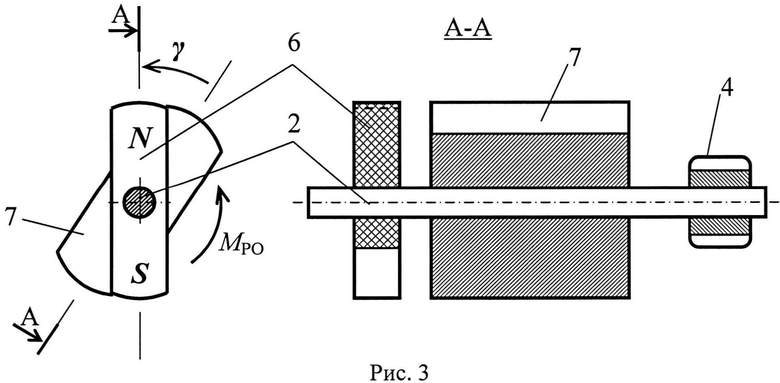
на рис.3 показан вид ротора электропривода со стороны магнитоэлектрического индуктора и в разрезе;
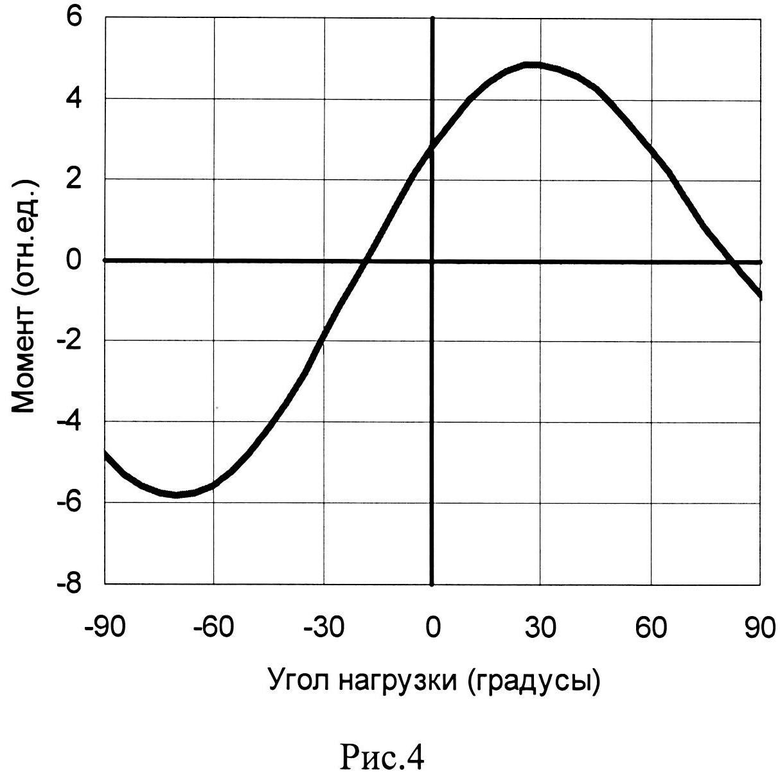
на рис.4 угловая характеристика при подключенном источнике переменного напряжения или тока;
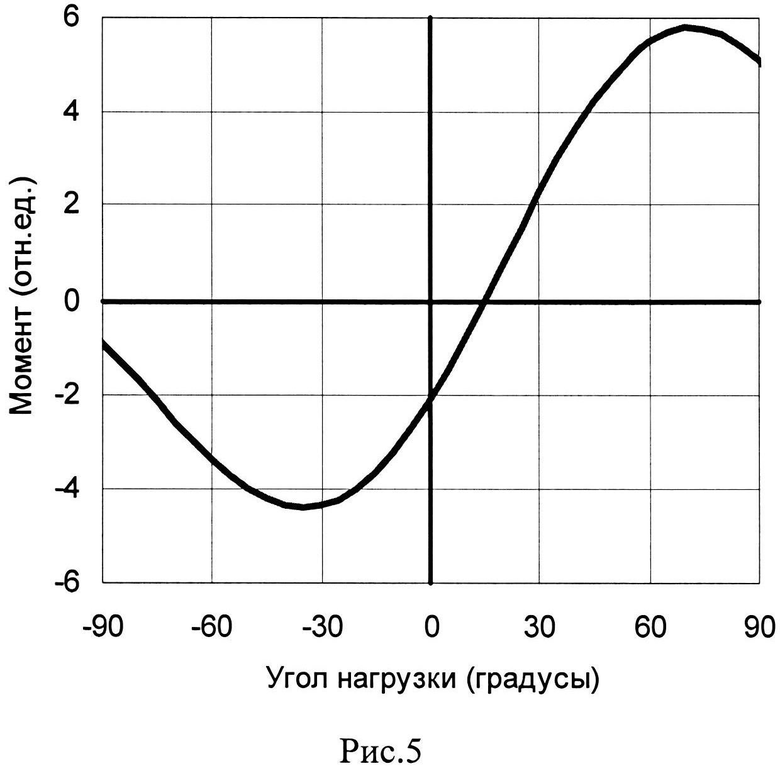
на рис.5 угловая характеристика при отключенном источнике переменного напряжения или тока и опускании регулирующего органа под собственным весом.
Электропривод регулирующего органа содержит синхронную машину 1, вал 2 ротора которой механически связан с регулирующим органом 3 посредством механического устройства 4, предназначенного для передачи вращающего момента от веса регулирующего органа 3 на вал 2 ротора и находящегося в зацеплении с зубчатой рейкой 5, присоединенной к регулирующему органу 3.
Синхронная машина 1 содержит на статоре многофазную обмотку, состоящую из двух параллельных ветвей в каждой фазе и имеющую по окружности статора два полюса чередующейся полярности.
Шаг витков обмотки статора по пазам составляет половину полюсного деления.
Выводы фаз обмотки через зажимы A1-X1, B1-Y1, C1-Z1 подключены к источнику переменного напряжения или тока (не показан). Фазы обмотки сопряжены между собой в звезду и подсоединены к зажимам A1, B1, C1 соответствующих фаз. Допускается также соединение в многоугольник или независимое включение фаз в разные электрические цепи.
Обмотка снабжена также выводами точек, эквипотенциальных относительно напряжения сети, соединенными с зажимами A2-X2, B2-Y2, C2-Z2 в соответствующих фазах, предназначенными для подключения конденсаторов.
Магнитоэлектрический индуктор 6 установлен на валу 2 ротора синхронной машины 1 с угловым смещением осей полюсов относительно осей зубцов зубчатого магнитопровода 7 на угол γ, не превышающий одной четвертой части полюсного деления, в направлении действия момента (МPO) от веса регулирующего органа, приложенного к валу 2 синхронной машины.
Электропривод работает следующим образом.
При подключении обмотки статора синхронной машины к сети многофазного напряжения или тока на зажимы A1-X1, B1-Y1, C1-Z1 многофазной обмотки статора синхронной машины в ней возникает магнитное поле, приводящее вал 2 ротора во вращение в результате взаимодействия силовых линий этого поля с зубчатым магнитопроводом 7 и с магнитоэлектрическим индуктором 6. В результате вращения постоянными магнитами магнитоэлектрического индуктора в фазах обмотки статора будет наводиться ЭДС. В силу разного углового положения осей полюсов магнитоэлектрического индуктора 6 относительно осей зубцов зубчатого магнитопровода 7 фазовый угол ЭДС, наводимой при вращении ротора синхронной машины 1 в одном направлении, будет отличен от фазового угла ЭДС, наводимой при вращении его в противоположном направлении. Различие фазового угла ЭДС влечет за собой различие углов нагрузки тока статора, а значит мощности и момента синхронной машины при вращении в разных направлениях по угловым характеристикам.
Алгебраическое сложение угловых характеристик разных пакетов приводит к увеличению амплитуды электромагнитного момента синхронной машины при вращении ротора в одном направлении и к уменьшению амплитуды при вращении ротора в противоположном направлении.
В частности, если угловой сдвиг осей полюсов магнитоэлектрического индуктора 6 относительно осей зубцов зубчатого магнитопровода 7 выполнен в направлении действия момента от веса регулирующего органа (МPO), то при работе в двигательном режиме синхронная машина развивает больший вращающий электромагнитный момент в направлении против приложенного внешнего момента, т.е. на подъем регулирующего органа (рис.4, нижняя полуволна характеристики). Тем самым обеспечивается увеличение ее перегрузочной способности (кратности максимального электромагнитного момента) при вращении ротора в направлении на подъем регулирующего органа. За счет этого обеспечивается более надежная работа электропривода при перемещении регулирующего органа вверх в случаях кратковременного увеличения нагрузки на валу двигателя по каким-либо причинам.
При принудительном опускании регулирующего органа (обмотка статора синхронной машины остается подключенной к источнику) момент синхронной машины при работе ее в двигательном режиме снижается, однако это снижение компенсируется моментом от веса регулирующего органа, направленным в сторону электромагнитного момента двигателя.
Максимальное значение угла смещения осей полюсов активного пакета относительно осей зубцов зубчатого магнитопровода, при котором обеспечивается наибольшая разница электромагнитного момента двигателя при движении вверх и вниз, составляет 1/4 часть полюсного деления активного пакета (или 1/2 часть зубцового деления зубчатого магнитопровода, что одно и то же).
При обесточивании обмотки статора синхронная машина переходит в генераторный режим, направление фазового угла меняется на противоположное, в результате чего изменяется и распределение электромагнитного момента по квадрантам угловой характеристики: в квадранте угловой характеристики, соответствующем генераторному режиму, - в направлении перемещения регулирующего органа вниз, кратность максимального момента возрастает (рис.5, верхняя полуволна характеристики). Это обеспечивает более эффективное ограничение скорости опускания регулирующего органа до установившегося значения.
Шаг катушек обмотки якоря по пазам рассмотренной синхронной машины (рис.2) составляет половину полюсного деления, но может быть использована обмотка с четным числом пазов на полюс и фазу q с любым шагом, меньшим диаметрального. Чем меньше укорочение шага, тем более эффективно, с большим моментом синхронная машина будет работать в двигательном режиме и менее эффективно - в генераторном режиме при обесточивании сети.
Выбирая обмотку якоря с соответствующим шагом, можно получить дополнительный эффект за счет оптимального сочетания уровней максимального момента синхронной машины, развиваемого ею в двигательном и генераторном режимах ее работы, приведения в соответствие заданной скорости опускания регулирующего органа и его массы.
В отличие от прототипа синхронная машина предложенного электропривода может быть выполнена с любым числом пазов на полюс и фазу, начиная с q=0,5, как с электромагнитной редукцией скорости вращения ротора, так и без нее.
Например, машина с четырехфазной (m=4) двухполюсной, 2p1=2, обмоткой статора при q=0,5 так же как и прототип содержит 8 зубцов на статоре и может быть укомплектована как двухполюсным индуктором, в этом случае ротор вращается со скоростью поля, так и шестиполюсным. В последнем случае, так же как и прототип, ротор вращается со скоростью, в Z раз меньшей, чем частота вращения поля, обеспечивая электромагнитную редукцию.
По сравнению с прототипом (он же базовый образец) предложенный электропривод обладает более широкой областью применения и большей надежностью, так как обеспечивает дополнительный запас электромагнитного момента синхронной машины на перемещение и торможение при движении регулирующего органа в нужных направлениях.
Предполагается использование предлагаемого электропривода в исполнительном механизме системы управления и защиты ядерного реактора, совмещающего функции перемещения и аварийного опускания регулирующего органа. Изготовлен и испытан опытный образец. Результаты испытаний полностью подтвердили заявленные технические качества и преимущество по сравнению с прототипом и базовым изделием. Проводится подготовка к мелкосерийному производству.
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕАКТИВНАЯ МАШИНА | 2010 |
|
RU2412519C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ ДЛЯ ЭЛЕКТРОПРИВОДА ВЕРТИКАЛЬНОГО ПЕРЕМЕЩЕНИЯ РЕГУЛИРУЮЩЕГО ОРГАНА | 2018 |
|
RU2693935C1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С МНОГОПАКЕТНЫМ ИНДУКТОРОМ | 2009 |
|
RU2382475C1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С ЯВНОПОЛЮСНЫМ ЯКОРЕМ | 2010 |
|
RU2416860C1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА | 2009 |
|
RU2407135C2 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С ПОЛЮСНЫМ ЗУБЧАТЫМ ИНДУКТОРОМ | 2009 |
|
RU2392723C1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С АКСИАЛЬНЫМ ВОЗБУЖДЕНИЕМ | 2010 |
|
RU2437203C1 |
| ИНДУКТОРНАЯ МАШИНА | 2010 |
|
RU2422971C1 |
| РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С ПОЛЮСНЫМ ЗУБЧАТЫМ ИНДУКТОРОМ | 2011 |
|
RU2478250C1 |
| ЭЛЕКТРИЧЕСКАЯ РЕДУКТОРНАЯ МАШИНА С ЭЛЕКТРОМАГНИТНЫМ ВОЗБУЖДЕНИЕМ | 2009 |
|
RU2401499C1 |
Изобретение относится к электротехнике и может быть использовано в качестве электропривода, в частности в системах автоматического управления положением и перемещением регулирующего органа (РО) ядерного реактора. Технический результат состоит в повышении надежности и расширении функциональных возможностей и области за счет увеличения перегрузочной способности, то есть предельного электромагнитного момента при вращении ротора на подъем регулирующего органа в двигательном режиме и при вращении ротора на опускание регулирующего органа под действием собственного веса в генераторном режиме. Электропривод содержит зубчатый статор с равномерно распределенными зубцами и многофазной обмоткой, включающей по две параллельные ветви в каждой фазе с выводами для подключения к источнику переменного напряжения или тока. На валу зубчатого ротора, расположенного внутри статора, размещен магнитоэлектрический индуктор, имеющий зубчатый магнитопровод, образующий по окружности ротора полюса чередующейся полярности, количество зубцов которого равно числу зубцов ротора. Индуктор установлен на валу так, что зубцы его магнитопровода смещены относительно зубцов ротора на угол, не превышающий одной четвертой части полюсного деления в направлении действия момента от веса регулирующего органа. 5 ил.
Электропривод для вертикального перемещения регулирующего органа, содержащий зубчатый статор с равномерно распределенными зубцами и многофазной обмоткой, включающей по две параллельные ветви в каждой фазе с выводами для подключения к источнику переменного напряжения или тока, установленный внутри статора зубчатый ротор, на валу которого размещен магнитоэлектрический индуктор, имеющий зубчатый магнитопровод, образующий по окружности ротора полюса чередующейся полярности, количество зубцов которого равно числу зубцов ротора, отличающийся тем, что магнитоэлектрический индуктор установлен на валу так, что зубцы магнитопровода смещены относительно зубцов ротора на угол, не превышающий одной четвертой части полюсного деления в направлении действия момента от веса регулирующего органа.
| РЕАКТИВНАЯ МАШИНА | 2010 |
|
RU2412519C1 |
| УСТРОЙСТВО ДЛЯ ВЕРТИКАЛЬНОГО ПЕРЕМЕЩЕНИЯ РЕГУЛИРУЮЩЕГО ОРГАНА ЯДЕРНОГО РЕАКТОРА | 1991 |
|
RU2030798C1 |
| УСТРОЙСТВО ДЛЯ ВЕРТИКАЛЬНОГО ПЕРЕМЕЩЕНИЯ РЕГУЛИРУЮЩЕГО ОРГАНА ЯДЕРНОГО РЕАКТОРА | 1989 |
|
SU1632237A1 |
| УСТРОЙСТВО ДЛЯ ВЕРТИКАЛЬНОГО ПЕРЕМЕЩЕНИЯ РЕГУЛИРУЮЩЕГО ОРГАНА | 1989 |
|
SU1692270A1 |
| EP 0256372 A2, 14.08.1986 | |||

