Изобретение касается автоматического 1 прибора с гироскопической массой для I съемки плана и профиля пройденного j пути. В предлагаемом приборе примеиены два шара, из коих один вращающийся фрикционно сцеплен с роликами, служащими для разложения скорости движения в горизонтальной и вертикальной плоскостях, и второй получающий вращение от одного из этих роликов фрикционно сцеплен с двумя другими роликами, предназначенными для разложения горизонтальной составляющей скорости на составляющие по осям абсцисс и ординат.
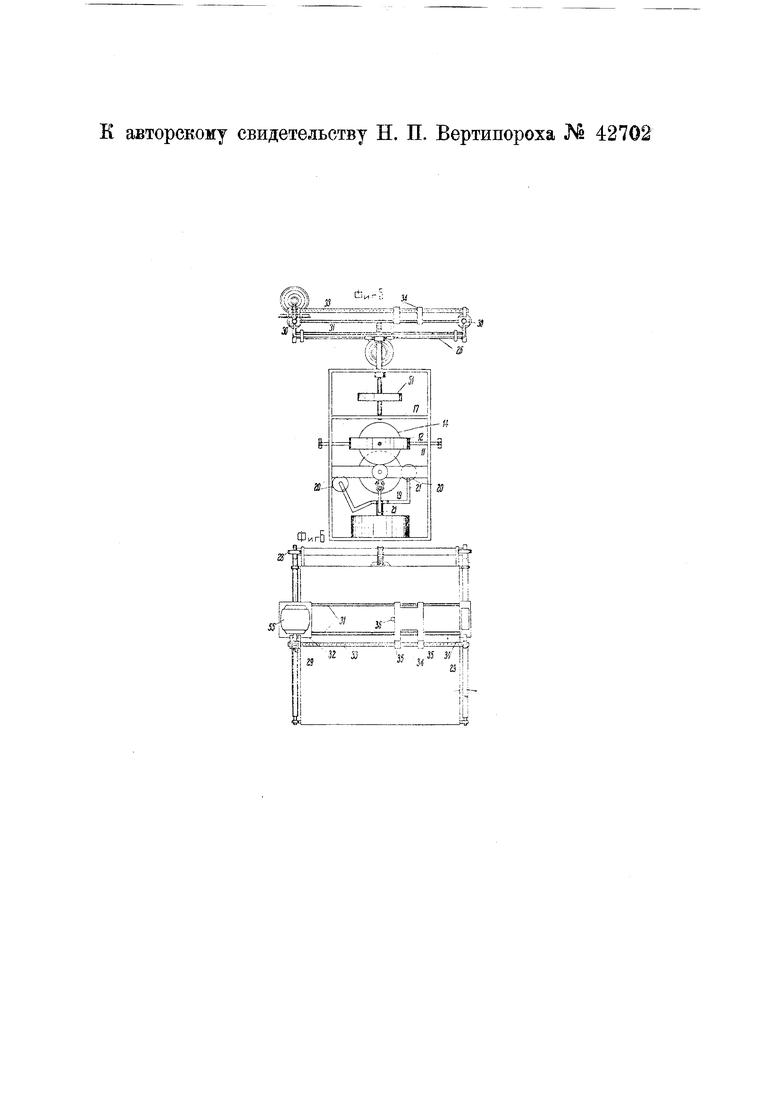
На схематическом чертеже фиг. 1 изображает общий вид прибора сбоку; фиг. 2-вид его сверху; фиг. 3 -продольный разрез механизма прибора; фиг. 4-- разрез по АВ на фиг. 3; фиг. 5 - вид механизма сбоку; фиг. б-вид механизма сверху; фиг. 7-продольный разрез автомата для печатания отметок высотных точек; фиг. 8-вид его сбоку, со стороны EF на фиг- 7; фиг. 9-вид стабилизатора сбоку; фиг. 10-вид его сзади.
Прибор установлен на повозке, состоящей из установленной на гусеницах 2 рамы / (фиг. 1) с трубами, в которых помещены пружины 8, поддерживающие раму 7 и предохраняющие ее от толчков; на этой раме неподвижно закреплен стабилизатор 57, предназначенный
для предохранения повозки от падения, и посредством карданова подвеса подвещен механизм 58 прибора.
Карданный прибор состоит из кольца 9 (фиг. 2), укрепленного посредством цапф 10, расположенных по продольной оси прибора (по оси движения), и снабженного в направлении, перпендикулярном к направлению цапф fO, осью 7/, на которой свободно подвешен механизм прибора. Для приведения механизма в действие служит шестерня 3, сцепленная с гусеницею 2 и передающая через посредство гибкой передачи 5 вращение оси 7/, жестко связанной с кольцом 9 механизма. На оси 77 жестко закреплена вилка 72 (фиг. 3), плоскость которой совпадает с плоскостью кольца 9, в р&мке этой вилки помещен вал /3, одним концом связанный с гибкой передачей 5, а на другом конце несущий шар 74. Остальная часть механизма, подвешенная нагюдобие маятника к оси 77 кольца 9, состоит из гирокомпаса 53 с валом 22, на котором посредством кронштейнов 27 укреплены ролики 9 и 20. Шар 74 фрикционно связан с роликами 75 и 16, и коих ролик 75 сидит на валу 54, укрепленном на раме J7 и жесткр связанном с шаром 18, который в свою очередь фрикционно связан с роликами 19 и 20. При передвижении повозки по мест ности шестерня 3 через посредство п-. передачи 5 приводит во вращение шар 14, который вращает ролики /5 и 76. При движении повозки по горизонтальной местности ролик 7бне вращается, а- ролик 15 вращается с числом оборотов, равным числу оборотов шара 14, умноженному на отношение диаметров шара и ролика. При движении повозки по местности, наклоненной под углом а к горизонту, механизм поворачивается на реи 7/ и занимает вертикальное положение, в связи с чем плоскости роликов поворачиваются на угол а вокруг ОСИ//; при этом числа оборотов роликов равны: ролика /5 - п п cosa и ролика Тб - п п sina, т. е. пропорциональны проекциям скорости движения прибора на горизонтальную и вертикальную плоскости. Вследствие вращения ролика /5 вращается шар /, передавая при этом вращение роликам 19 и 20, которые делают числа «1 и «2 оборотов, равные числу Р оборотов шара /5, умноженному на отношение диаметра шара к диаметру соответствующего ролика.
Крепление роликов в механизме таково, что при показаниях 0° гирокомпаса ролик 7Р (синус-ролик) находится в вертикальной плоскости, совпадающей с осью вращения, и касается его в точке, лежащей на оси, а ролик 20 (косинус-ролик) находится в вертикальной плоскости, перпендикулярной к оси вращения шара.
При поворотах повозки, а следовательно и механизма вправо или влево на некоторый угол р вал 22 гирокомпаса сохраняет свое направление в пространстве и вследствие этого ролики 19 и 20, жестко с ним связанные, поворачиваются в отношении остальной части механизма на тот же угол вокруг отвесной оси, проходящей через центр шара 18. Этим поворотом достигается получение переменного числа оборотов роликов 19 и 20, которые в каждый данный момент равны /ii /licos Р и Wj Щ sin Р, а так как число оборотов шара J8 пропорционально горизонтальной составляющей скорости движения повозки по местности, то число оборотов ролика 20 будет пропорционально проекции этой составляющей на меридиан, а ролика 19-проекции на параллель, т. е.
«г cos р С . -0 и л,
sin С .V
где С-коэфициент пропорциональности, гор - проекция скорости прибора на горизонтальную плоскость, v - проекция скорости на меридиан, v проекция скорости f на параллель.
Ролики 19 и 20 (синус и косинусролики) снабжены изолированными контактными стерженьками 23, соединенными при помощи проводников с электромоторами 55 и 56 (синус и косинусмоторы). Вторые провода этих моторов через источник тока присоединены к шару. Когда стерженьки 23 касаются шара, цепи моторов замыкаются и моторы делают вполне определенное, наперед заданное число оборотов.
Косинус-мотор 56 при помощи червяка 24, червячного колеса 25, вала 26 и винтовых шестерен 27 и 28 вращает винты 29, расположенные по бокам планшета в меридиональном . направлении (в направлении, совпадающем с осью х-ов). На гайках 30 этих винтов закреплена каретка, состоящая из направляющих стержней 31 и площадки 32, на которой укреплен синус-мотор 55, вращающий при помощи червячной передачи винт 33, опоры которого вращаются в подшипниках, укрепленных на гайках 30. Винт 33 двигает каретку 34, прикрепленную к гайкам 35 и скользящую по направляющим стержням 3/. На ка ретке 34 укреплен карандаш 36 и уста-новлен автомат, отмечающий и надписывающий горизонтали.
При таком расположении каретки 34 при вращении мотора 56 карандаш получает заданное перемещение по меридиану, а при вращении мотора 55 - такое же перемещение по параллели. При движении прибора по местности карандаш чертит в известном масштабе на планшете линию, совпадающую по направлению с направлением движения прибора.
Переключение моторов на прямой и обратный ход производится автоматически, в момент перемены тригонометрической функцией знака, а именно, для синус-мотора, когда синус-ролик поворачивается на 180° по отношению к начальному положению, а для косинус-мотора, когда косинус-ролик поворачивается на 90°. Переключение производится разрезанными кольцами, закрепленными на крышке гирокомпаса и контактными роликами-щетками, закрепленными на валу гирокомпаса. Так как поворачиванию синус и косинус-роликов вокруг оси вала гирокомпаса мешает вал шара 18, то ролики установлены в количестве четырех штук, из которых в каждый момент работают только два ролика, а остальные, путем соответствуюших напраБляюш,их, отводятся от соприкосновения с шаром и в этот момент проходят под валом шара 18.
Высотный ролик 16 связан с автоматом для печатания отметок высотных точек. Ролик вращается со скоростью, пропорциональной вертикальной составляющей скорости прибора по местности; в связи с этим, за какой-нибудь промежуток времени число оборотов ролика 16 пропорционально проекции пройденного прибором пути на вертикаль, т. е. одному обороту ролика соответствует вполне определенное поднятие или опускание прибора. Ролик 16 превышений снабжен контактным стержнем 37, который при соприкосновении с иларом 14 включает мотор, вращающий автомат для печатания отметок.
Вал мотора вращает кривошип 38 (фиг. 7 и 8} с двумя цапфа ми 55 и 40. Цапфа 4Q заходит в вырез мальтийского креста J/ и поворачивает на определенную долю окружности вал 42, на котором он сидит. На этом же валу закреплено печатающее колесо 43 (с цифрами и иголками против цифр для накалывания отметок рядом с карандашом) и свободно сидят печатающие колесики 44 и 45 (без иголок). Эти колесики соединены между собой и с колесом 43 при посредстве шестеренок 46. Поворот колеса 43 на один оборот вызывает поворот колеса на io оборота и т. д. При вращении мотора цапфа 39 упирается в стойку 47 и опускает вниз систему колесиков с цифрами. Система колесиков 43, 44, 45, 46 скреплена соответствующей рамкой,имеющей хомутики 48, которыми она скользит по направляющей стойке 49, укрепленной на каретке 34 автомата-мотора. Под печатающими колесиками проходит лента (на чертеже не показанная) от пишущей машинки, а потому, когда колесики 43, 44, 45 касаются плана, они
отпечатывают соответствующее число. Обратно рамка возвращается натяжными пружинами 50. При поднимании рамки также происходит передвижение ленты собачкой, сидящей на рамке и сцепленной храповым колесом катушки-ленты. Таким образом, за каждый оборот вала мотора происходит поворачивание колесиков с цифрами и опускание этих колесиков вниз. При переходе прибора через точку перегиба местности должна печататься та же отметка, что была до перегиба; это требование выполняется, так как мотор начинает вращаться в обратную сторону.
Съемку производят от опорных пунктов в плане и по высоте, для чего перед началом работы карандаш ставят в точку планшета, соответствующую точке местности, а валик 42 вращают и на нем ставят соответствующую высоту.
На вертикальной оси проходящей через точку пересечения осей карданов подвеса, установлен маховик, вращаемый электромотором, на чертеже не показанным. Присутствие маховика превращает систему, качающуюся на осях карданова подвеса, в гироскопический маятник
2-Ап.
с периодом колеоании t , где л-
полярный момент инерции маховика, п- угловая скорость вращения маховика и / /о-статический момент системы относительно оси подвеса.
При периоде колебаний в 30 секунд действия толчков и вращательных колебаний прибора вокруг продольной и поперечной осей должны практически сводиться к нулю, так как периоды этих колебаний меньше одной секунды. Действие сил инерции при разгоне и остановке, а также центробежной силы на поворотах, при скоростях прибора до 20 км в час, при периоде в 30 секунд, тоже незначительно и величина погрешности от них не должна влиять на точность работы.
На раме 7 укреплен стабилизатор, назначение которого-держать продольную плоскость прибора в вертикальном положении. Для этого на наружной раме 7 укреплены гнезда для цапф рамы 52 (фиг. 9 и 10) с маховиком 53, получающим вращение от мотора, на чертеже не показанного; ось вращения маховика
находится в продольной плоскости прибора, а ось цапф рамы 52 перпендикулярна к этой плоскости. Центр тяжести подвешенного на раме 52 устройства находится на оси цапф этой рамы. Рама 52 соединена с мотором, вращающим раму вместе с маховиком |в продольной плоскости прибора (вокруг оси цапф). Мотор укреплен неподвижно на корпусе, связанном с 7, и питающий его ток проходит через переключатель, расположенный на раме 7 и кольце Я
Когда продольная плоскость прибора наклоняется вправо или влево, этим самым плоскости рамы 7 и кольца Р образуют некоторый угол, так как прибормаятник висит отвесно, благодаря чему включается мотор-стабилизатор, вращающий раму 52 с маховиком в таком направлении, что возникающий гироскопический момент, действуя через цапфы этой рамы не раму 7, возвращает плоскость в вертикальное положение.
Предмет изоб ре тения.
1. Автоматический прибор для съемки плана и профиля пройденного пути с гироскопической массой, отличающийся применением вращающегося шара J4, жестко сидящего на укрепленном в положении неизменном в отношении раны повозки валу /5 и фрикционно сцепленного- с роликами 75, /б, соответственно укрепленными на подвижной раме /7, несущей мехггнизм приборз, и слукчащими для разложения скорости
движения в горизонтальной и вертикальной плоскостях.
2.Прибор по п. 1, отличающийся
применением второго шара 18, жестко укрепленного на валу 54, получающем вращение от ролика /5, и фрикционно сцепленного с роликами 19, 2G, установленными посредством кронштейнов 2/ по вертикальной оси гирокомпаса и предназначенными для разложения горизонтальной составляющей скорости на составляющие по оси абсцисс и ординат, для чего эти ролики посредством контактных стерженьков 23 синхронно связаны с электромоторами 55 и 56, предназначенными для перемещения пишущего устройства по оси абсцисс и ординат.
3.В прибора по пп. 1 и 2 применение автомата для печатания отметок высотных точек, синхронно связанного с высотным роликом 16.
4.В приборе по пп. 1 и 2 применение расположенных одна за другой в одну линию гусениц 2, предназначенных дня предохранения прибора от толчков при прохождении мелких препятствий на местности и устранения записи этих преП71ТСТЗИЙ на плане.
5.В приборе по пг. 1, 2, 3, 4 приманзние стабилизатора 57, предназначенного для придания устойчивости повозке.
6.В приборе по пп. 1-5 применение пру:кин 8, служащих длк устранения толчков при перемещении приборз по мзстности.
Фиг
а е
& /--г л;:: -
вЪ :гЛ:/ , .;.; /VjX ;. 1-1ДА I
i Л
а о, I гг
uL-IL
.
tv./
---3 я авторскому свидетедьству М. П. Вертипороха № 42702
| название | год | авторы | номер документа |
|---|---|---|---|
| Аппарат для автоматического выполнения совместной горизонтальной и вертикальной топографической съемки | 1932 |
|
SU37857A1 |
| Аппарат для измерения площадей на местности | 1932 |
|
SU40591A1 |
| Автоматический прибор для съемки плана местности | 1930 |
|
SU26448A1 |
| Прибор для автоматического нивеллирования с присоединением прибора для записи плава местности | 1929 |
|
SU17762A1 |
| АВТОМАТИЧЕСКИЙ ПРИБОР ДЛЯ НИВЕЛЛИРОВАНИЯ | 1925 |
|
SU4638A1 |
| Устройство для испытания манометров и иных приборов переменным давлением | 1928 |
|
SU10720A1 |
| УСТРОЙСТВО ДЛЯ РАЗБОРКИ СТЕН ЗДАНИЙ | 1937 |
|
SU51998A1 |
| Автоматический прибор для измерения длины проекции пройденного пути | 1934 |
|
SU43167A1 |
| Прибор для производства городских и дорожных съемок | 1930 |
|
SU19801A1 |
| Устройство для автоматического вычерчивания профиля пути | 1935 |
|
SU45423A1 |


Фип7
,|
;-1;-N:i г Г1;
йИи
4/« rmTTTTS;.
и il i-;j n,jy : i
.,,,r,
./irHL.- L
ПИ
Ь II ---|- - .

