Известны аппараты для автоматических геодезических съемок, выполненные в виде (юдвижнвй тележки, снабженной диференцнальным механизмом, сочлененным с незаиксимыми друг от друга колесами; не представляет НОВИЗНЫ применение в передаточных механизмах автоматических аппаратов для геодезической съемки расположенных один В другом независимых валов; неоднократно предлагалось перемещение карандаша в направляющих салазках этих аппаратов помощью фрикционных дисков; также известно воздейлтвие качающимся грузом на записывающее устройство таковых аппаратов с целью вычерчивания линии пропорционально их проекциям на горизонтальную плоскость.
Предлагаемый аппарат в основном предназначается для комбинированной (горизонтально-вертикальной) топографической съемки, с одновременным вычислением площадей снимаемых контуров. Кроме Тто, аппарат может быть использован для графического перенесения проекта в натуру, для рекогносцировки при построении тригонометрической сети.
Съемка производится путем объезда по границам снимаемого контура, а также проезда по характерным линиям местности для выявления рельефа.
В результате объезда на планшете, находящемся на аппарате, автоматически вычерчиваются границы контуров, отмечаются места пересечения этих границ, а также характерных линий рельефа, с горизонтальными, к надписываются (отпечатываются) отметки горизонталей. Особый счетчик указывает площади контуров.
Регистрирующий аппарат размещается на четырехколесной тележке, передвигающейся при помощи двигателя.. Аппарат обсдужи(287)
вается шофером к одним специалистом (топографом при съемке, землеустроителем-при перенесении проекта в натуру и пр.).
Аппарат представляет собою систему зубчатых колес и ДИСКОВ, передакодих движение карандашу на мензульной доске от ведугцих колес телеягки; система передач устроен, таким образом, что караидащ зачерчивает фигуры, подобные контурам местности.
На чертеже фиг. 1 изображает разрез по линии MNOP на фиг. 2; фиг. 2-вид аппарата сверху; фиг. 3, 3, в трех п;:оекциях приспособления д.тя учета горизонталей; фиг. 4. 4-ВИД В двух проекциях маятника к означенному приспособлению; фиг. 5-схему электромагнитного приспособления для нанесения горизонталей; фиг. 6-примерное устройство контакта по схеме фиг. 5.
Аппарат, вычерчивающий план (. 1 и 2)помещается на четырехколесной тслеяскеприводимой В движение от двигателя. Последний располагается на передней оси, на пружине так, чтобы сотрясения от работы .двигателя передавались исключительно на переднюю ось. Тянущими тележку колесами являются переяние, т. е. вал двигателя связан с передними ко.тесами.
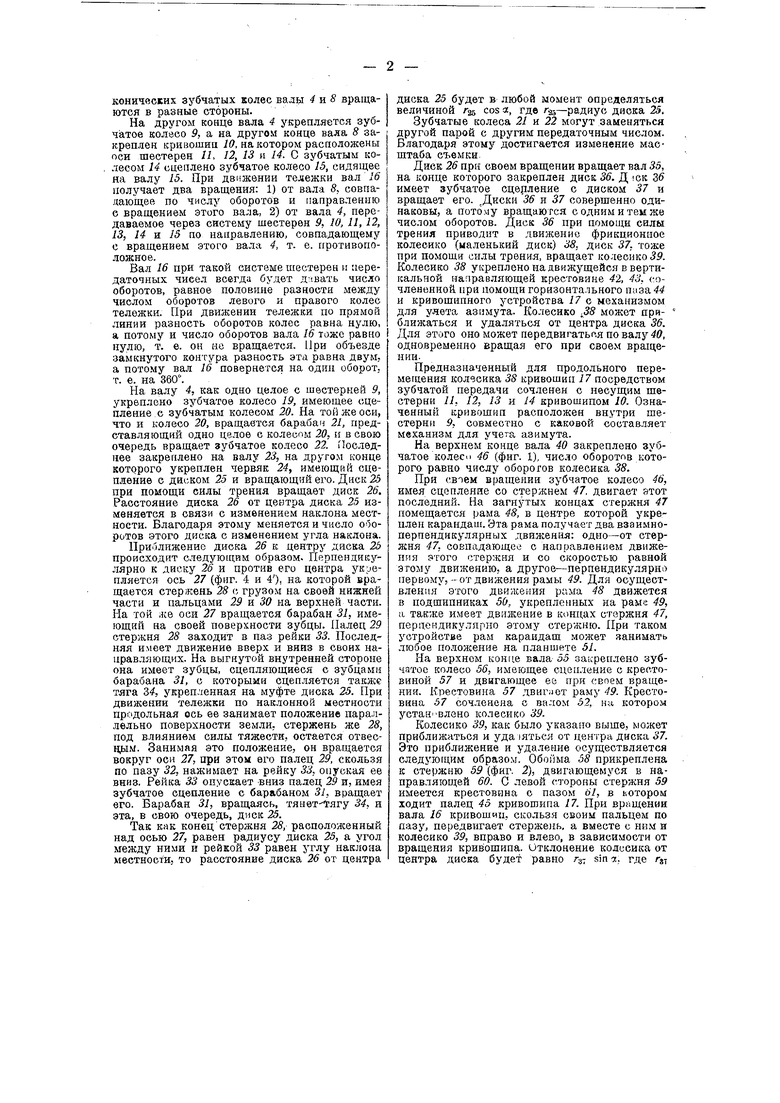
Регистрирующий аппарат приводится к дей ствие от задних колес. Правое заднее кoлec) укрепляется неподвижно на валу 1 (фиг. 2), на котором закреплено также коническое зубчатое колесо 2. Это последнее при помощи конического зубчатого колеса 3 вращает вал 4. Левое заднее колесо тележки, укреп.11енное на валу 5, при посредстве коничес.ких зубчатых колес б и 7 вращает вал 8. располагаемый внутри вала 4. Когда тележка движется, то при указанном на фиг. 1 и 2 размещении
конических зубчатых колес валы 4 к 8 вращаются в разные стороны.
На другом конце вала 4 укрепляется зубчатое колесо 9, а на другом конце вала 8 закреплен кривошиа б, на котором расположены оси шестерен 11, 12, 13 н 14. С зубчатым колесом 14 сцеплено зубчатое колесо 15, сидящее на валу 15. При движении тедежки вал 16 получает два вращения: 1) от вала 8, совпадающее по числу оборотов и направлению с вращением этого вала, 2) от вала 4, передаваемое через систему шестерен 9, 10, 11,12, 13, 14 и 15 по направлению, совпадающему с вращением этого вала 4, т. с. противоположное.
Вал 16 при такой системе шестерен и передаточных чисел всегда будет давать число оборотов, равное половине разности между числом оборотов левого и правого колес тележки. При движении тележки по прямой линии разность оборотов колес равна нулю, а потому и число оборотов вала 16 тоже равно нулю, т. е. он не вращается. При объезде замкнутого контура разность эта равна двум, а потому вал 16 повернется на одрп оборот, т. е. на 360°.
На валу 4, как одно целое с шестерней 9, укреплено зубчатое колесо 19, имеющее сцепление.с зубчатым колесом 20. На той же оси, что и колесо 20, вращается барабан 21, представляющий одно целое с колесом 20, п в свою очередь вращает зубчатое колесо 22. Последнее закреплено на валу 23, на другом конце которого укреплен червяк 24, имеющий сцепление с диском 25 и вращающий его. Диск 25 при помощи силы трения вращает диск 26, Расстояние диска 26 от центра диска 25 изменяется в связи с изменением наклона местности. Благодаря этому меняется и число оборотов этого диска с изменением угла наклона.
Приближение диска 26 к центру диска 25 происходит следующим образом. Перпендикулярно к диску 26 и против его центра укрепляется ось 27 (фиг. -1 и 4), на которой вращается стержень 28 с грузом на своей нижней части и пальцами 29 и 30 на верхней частн. На той же оси 27 вращается барабан 31, имеющий на своей поверхности зубцы. Палец 29 стержня 28 заходит в паз рейки 33. Последняя имеет движение вверх и вниз в своих направляющих. На выгнутой внутренней стороне она имеет зубцы, сцепляющиеся с зубцами барабана 31, с которыми сцепляется также тяга 34, укрепленная на муфте диска 25. При движении тележки по наклонной местности продольная ось ее занимает положение параллельно поверхности земли, стержень же 28, под влиянием силы тяжести, остается отвесH JM. Занимая это положение, он вращается вокруг оси 27, при этом его палец 29, скользя по пазу 52, нажимает на рейку 33, опуская ее вниз. Рейка 33 опускает -вниз палец 29 и, имея зубчатое сцепление с барабаном 31, вращает его. Барабан 31, вращаясь, тянет--1ягу 34, и эта, в свою очередь, диск 25.
Так как конец стержня 28, расположенный над осью 27, равен радиусу диска 25, а угол между ними и рейкой 33 равен углу наклона местности, то расстояние диска 26 от центра
диска 25 будет в любой момент определяться величиной /25 cos я, где /as-радиус диска 25.
Зубчатые колеса 21 и 22 могут заменяться другой парой с другим передаточным числом. Благодаря этому достигается изменение масштаба съемки
Диск 26 при своем вращении вращает вал 35, на конце которого закреплен диск 36. Д ск 36 имеет зубчатое сцерление с диском 37 и вращает его. ,Дкски 36 и 37 совершенно одинаковы, а потому вращаются с одним и тем же числом оборотов. Диск 36 при помощи силы трения приводит в движение фрикционное колесико (маленький диск) 38. диск 37. тоже при помоши силы трения, вращает колесико ЗР. Колесико 38 укреплено на движущейся в вертикальной направляющей крестовине 42, 43, сочлененной, при помощи горизонтального паза 44 и кривошипного устройства 17 с механизмом для улета азимута. Колесико 38 может приближаться и удаляться от центра диска 36. Для этого оно может передвигаться по валу 4(, одновременно вращая его при своем вращении.
Предназначенный для продольного перемещения колесика 38 кривошип 17 посредством зубчатой передачи сочленен с несущим шестерни 11, 12, 13 и 14 кривошипом 10. Означенный кривошип расположен внутри шестерни 9, совместно с каковой составляет механизм для учета азимута.
На верхнем конце вала 40 закреплено зубчатое колесч 46 (фиг. 1), число оборотов которого равно числу оборотов колесика 38.
При своем вращении зубчатое колесо 46, имея сцепление со стерл нем 47, двигает этот последний. На загнутых концах стержня 47 помещается рама 48, в центре которой укреплен карандаш. Эта рама получает два взаимноперпендикулярных движения: одно-от стержня 47, совпадающее с направлением движения этого стержня и со скоростью равной этому движению, а другое-перпендикулярно первому, - от движения рамы 49. Для осуществления этого движения рама 48 движется в подшипниках 5С, укрепленных на раме 49, л также имеет движение в концах стержня 47, перпендикулярно этому стержню. При таком устройстве рам карандаш может занимать любое положение на планшете 51.
На верхнем KOHrie вала 55 за1;реплено зубчатое колесо 56, имеющее сцепление с крестовиной 57 и двигающее ее при своем вращении. Крестовина 57 двиг:Jeт раму 49. Крестовина 57 сочленена с валом 52, на котором установлено колесико 39.
Колесико 39, как было указано выше, может приближаться и уда 1яться от центра диска «37. Это приближение и удаление осуществляется следуюгцим образом. Обойма 58 прикреплена к стержню 59 (фиг. 2), двигающемуся в направляющей 60. С левой стороны стержня 59 имеется крестовина с пазом 61, в котором ходит палец 45 кривошипа 17. При вращении вала 16 кривошип, сиользя своим пальцем по пазу, передвигает стерже)1ь, а вместе с ним и колесико 39, вправо и влево, в зависимости от вращения кривошипа. Отклонение колисика от центра диска будет равно /-37 sin 7.. где rj
радиус диска 37, равный радиусу диска 36, равный длине кривошипа, а а-угол поворота кривошина от начального положения, равный азимуту направления движения тележки.
Таким образом, рама 49 двигается со скоростью,, изменяющейся но закону синуса азимута. При своем движении эта рама двигает по параллели раму 48, на которой укреплен карандаш; в обшем карандаш имеет две скорости: одну-по меридиану, а другую-по иараллели. Скорость по меридиану равна скорости рамы 48, а по параллели-скорости рамы 49. Так как эти скорости изменяются по зак«ну cos а и since, то карандаш будет вычерчивать контур.
Для удобства ориентирования мензульной Доски последняя ножет вращаться вокруг оси 62. Для отсчета угла поворота мензульной доски по отношению к продольной оси тележки к подставке доски прикрвпЛяется азимутальное кольцо 63, а к станине тележки-указатель 64. Кольцо 63 прикрепляется к подставке таким образом, что когда меридиан доски совпадает с осью тележки, то против указателя иаходится нуль,,а деления идут по часовой стрелке. При таком устройстве, когда мензульная доска ориентирована, на кельце против указателя отсчитывается азимут направления, совпадаюицего с осью тележки. Для того, чтобы аппарат работал правильно, нужно поставить кривошип 17 так, чтобы он указывал тот же азимут, что и указатель при кольце 65 мензульной доски. Тогда при движении тележки по этому азимуту, карандаш будет иметь составляющие скорости, одна из которых будет 42 v cos aj, а другая г/48 . siu «1, и поэтому вычертит на планшете линию, азимут которой будет aiЕсли теперь тележка сделает поворот и будет двигаться по азимуту «а. то кривошип повернется, указатель его будет указывать азимут в соответствии с этим скорости карандаша изменятся и будут: «48 . ° з 4з гор а поэтому карандаш сделает поворот и будет чертить линий по азимуту ад и т. д. Таким образом, в начале работы, мензульная доска ориентируется, отсчитывается азимут направления оси тележки и по этому азимуту ставится кривошип. В дальнейшем карандаш следует за поворотами тележки.
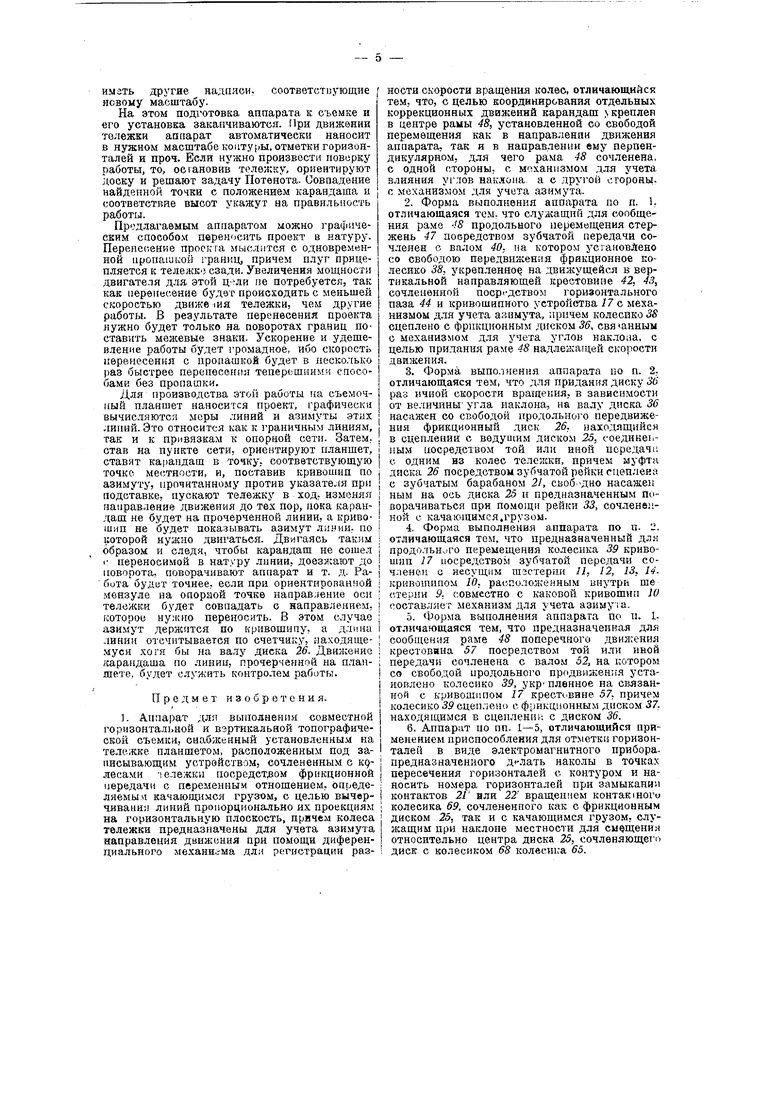
Диск 2р при помощи силы трения вращает колесико &5 (фиг. 1), которое, скользя по валу 66 н враш;ая его, может то приближаться, то удаляться от центра. Диска 25. На другом конце вала 66 закрепляется зубчатое колесо 67, вращающее зубчатое колесико 68. На одном валу с этим последним сидит колесико 69.
Движение гколесика 65 в одну и другую сторону от центра диска 25 осуществляется следующим обравом (фиг. 3 и 4). Колесико помещается в обойме 70 н укрепляется на опрокинутом Т-образном стержне 71. Этот стержень на нижней своей части (перекладине) имеет выступ 72, которым он заходит в паз направляющей. В верхней части имеется паз, в который заходит палец 30 стержня с грузом. При появлении угла наклона местности стержень с грузом, занимая отвесное положение, вращается около свое оси 27. нажимает пальцем 30 на стержень 71 и отклоняет его в ту или другую сторону. Когда местность горизонтальна, то колесико 65 нроходит через центр диска 25. При угле наклона о расстояние его от центра будет равно г sin а, а число
35
оборотов (в минуту) /ZOB /735- -sin а. с таким
же числом оборотов будет вращаться зубчатое колесо 67, т. е. Лв7 «es- Число оборотов колеса 69, равное числу оборотов зубчатого колеса 68, будет равно:
d«i 67rfas
67
sin а
«60 - «С8 - П,, „ «So
Нанесем на окрулсности колесика деления и поставим указатель 74. Если затем, зная высоту местности, на которой стоит тележка; повернуть колесико 69 так, что против указателя окажется деление, соответствующее высоте местности, и пустить тележку в ход, то в любой точке местности можно на ободе колесика 69 отсчитать высоту этой точки. Зная отметки горизонталей, как числа, кратные сечению, например, 320, 330, 340 и т. д. при сечении в 10 метров, можно, следя за колесиком 69. отмечать на линии, прочерчиваемой карандашом на планшете, места пересечения горизонталей с этой линией.
Отмечать нужно в тот момент, когда против указателя будет отметка соответствующей горизонтали.
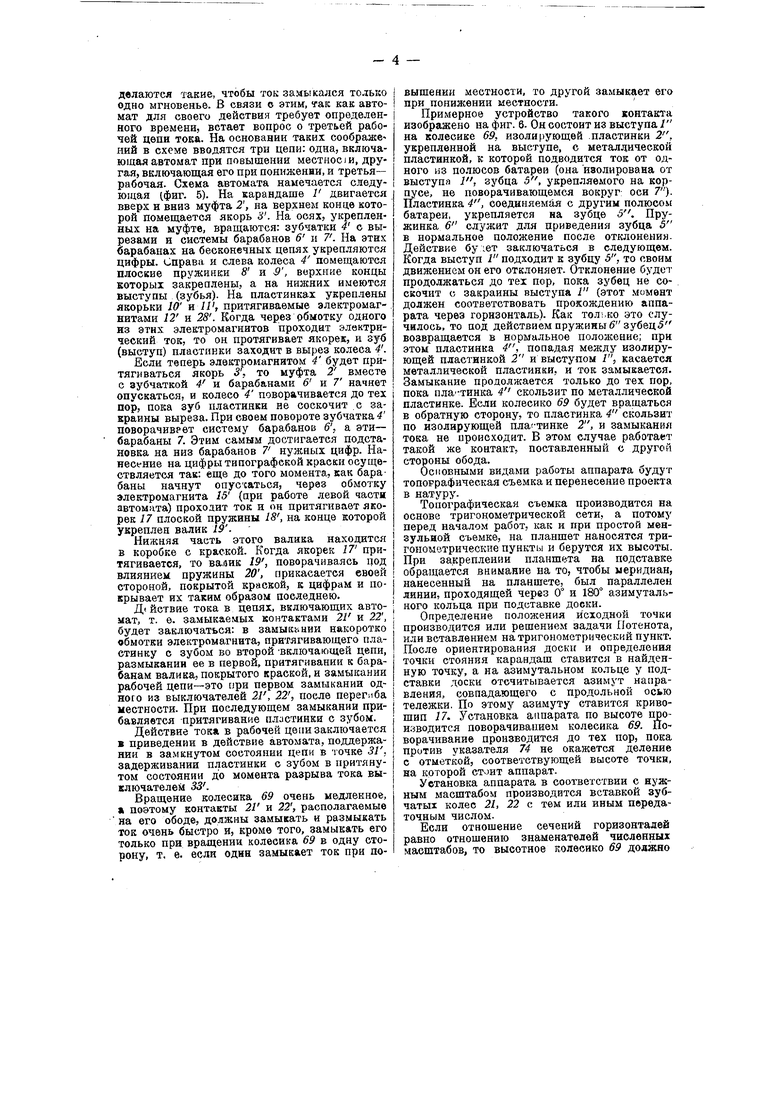
В предлагаемом аппарате эта работа выполняется электромагнитным прибором,задачи которого-делать накол в точке пересечения горизонтали с границей контура, а также отпечатывать четырехзначное число, показывающее отметку горизонтали. Печатание отметок можно представить, как опускание барабана с четырьмя рядами цифр. При увеличении отметок барабан должен вращаться в одну сторону, а при уменьшении-в другую сторону. Кроме того, перед точкой перегиба местности и за точкой перегиба горизонтали будут с одянакоьыми отметклмн, а потому в эти точки местности бараб;.н должен только опускаться, но не вращаться.
Эти два момента ложатся в основу при составлении схемы прибора. Так как пос.яв точки перегиба меняется направление вращения колесика, то этот момент и использован при составлении схемы, а именно на ободе колесика 69, на правой н левой его сторонах, против отметок горизонталей, помещаются электрические контакты. Эти контакты, подходя к указателю, замыкают цепь электрического тока, приводящего в действие автомат. При этом, при вращении колесика 69 в одну сторону-работают только контакты, расположенные, например, по правую сторону, и замыкают цепь электрического тока, действующегб таким образом, что барабан вращается тоже вправо; при вращении колесика бРв другую сторону-замыкается и вторая цепь, действующая на автомат таким образом, что барабан вращается в обратную, сторону. Таким образом намечаются две цепи влектрического тока. Теперь, так как колесико 69 вращается очень медленно, то замыкателн тока на ободе
делаются такие, чтобы ток замыкался тольгго одно мгновенье. В связи о этим, «гак как автомат для своего действия требует определенного времена, встает вопрос о третьей рабочей цепи тока. На основании таких соображений в схеме вводятся три цепи: одна, включающая автомат при повышении местное)и, другая, включающая его при понижении, н третьярабочая. Схема автомата намечается следующая (фиг. 5). На карандаше 1 двигается вверх и вниз муфта 2, на верхнем конце которой помещается якорь S. На осях, укрепленных на муфте, вращаются: зубчатки 4 с вырезами и системы барабанов 6 н 7. На этих барабанах на бесконечных цепях укрепляются цифры. Справа и слева колеса 4 помещаются плоские пружинки 8 и 9, верхние концы которых закреплены, а на нижних имеются выступы (зубья). На пластинках укреплены якорьки 10 к Ц, притягиваемые электромагнитами 12 и 28. Когда через обмотку одного из этих электромагнитов проходит электрический ток, то он протягивает якорек, и зуб (выступ) пластинки заходит в вырез колеса 4. Если теперь электромагнитом 4 будет притягиваться якорь 3, то муфта 2 вместе с зубчаткой 4 и барабанами б и 7 начнет опускаться, и колесо 4 поворачивается до тех пор, пока зуб пластинки не соскочит с закраины выреза. При своем повороте зубчатка 4 поворачиврет систему барабанов 6, а эти- барабаны 7. Этим самым достигается подстановка на низ барабанов 7 нужных цифр. Нанесение на цифры типографской краски осуществляется так: еще до того момента, как барабаны начнут опуссаться, через обмотку электромагнита /5 (при работе левой части автомата) проходит ток и он притягивает якорек 17 плоской пружины 18, на конце которой укреплен валик 19.
Нижняя часть этого валика находится в коробке с краской. Когда якорек 17 притягивается, то ва.11ик 19, поворачиваясь под влиянием пружины 20, прикасается еноей стороной, покрытой краской, к цифрам и покрывает их таким образом последнею.
Д( йствие тока в цепях, включающих автомат, т. е. замыкаемых контактами 21 и 22, будет заключаться: в замыкании накоротко обмотки электромагнита, притягивающего пластинку с зубом во второй Включающей цепи, размыкании ее в первой, притягивании к барабанам валика, покрытого краской, и замыкании рабочей цепи-это при первом замыкании одного из выключателей 21, 22, после перегиба местности. При последующем замыкании прибавляется притягивание пластинки с зубом, Действие тока в рабочей цени заключается в цриведении в действие автомата, поддержаНИИ в замкнутом состоянии цепи в точке ЗГ. задерживании пластинки с зубом в притянутом состоянии до момента разрыва тока выключателей 33.
Вращение колесика 69 очень медленное, я поэтому контакты 21 н 22, располагаемые на его ободе, должны замыкать и размыкать ток очень быстро и, кроме того, замыкать его только при вращении колесика 69 в одну сторону, т, е. если один замыкает ток при поI вышении местности, то другой замыкает его I при понижении местности. I Примерное устройство такого контакта изображено на фиг. 6. Он состоит нз выступа / на колесике 69, изолирующей .пластинки 2, укрепленной на выступе, с металлической пластинкой, к которой подводится ток от одного из полюсов батареи (она изолирована от выступа , зубца 5, укрепляемого на корпусе, не поворачивающемся вокруг: оси 7). Пластинка 4, соединяемая с другим полюсом батареи, укрепляется на зубце 5, Пружинка 6 служит для приведения зубца 6 в нормальное положение после отклонения. Действие булет заключаться в следующем. Когда выступ 1 подходит к зубцу 6, то своим движением он его отклоняет. Отклонение будет продолжаться до тех пор, пока зубец не соскочит с закраины выступа 1 (этот момент должен соответствовать прохождению аппарата через горизонталь). Как только это случилось, то под действием пружины б зубец5 возвращается в нормальное положение; при этом пластинка 4, попадая между изолирующей пластинкой 2 н выступом /, касается металлической пластинки, н ток замыкается. Замыкание продолжается только до тех пор, пока плагтинка 4 скользит по металлической пластинке. Если колесико 69 будет вращаться в обратную сторону, то пластинка 4 скользит по изолирующей пластинке 2, и замыкания тока не происходит. В этом случае работает такой же контакт, поставленный с другой стороны обода.
Основными видами работы аппарата будут топографическая съемка и перенесение проекта в натуру.
Топографическая съемка производится на основе тригонометрической сети, а потому перед началом работ, как и при простой мензульной съемке, на планшет наносятся тригонометрические пункты и берутся их высоты. При закреплении планшета на подставке обращается внимание на то, чтобы меридиан, нанесенный на планшете, был параллелен линии, проходящей через 0° и 180° азимутального кольца при подставке доски.
Определение положения исходной точки производится или решением задачи Потенота, или вставлением на тригонометрический пункт. После ориентирования доски и определения точки стояния карандаш ставится в найденную точку, а на азимутальном кольце у подставки доски отсчитывается азимут направления, совпадающего с продольной осью тележки. По этому азимуту ставится кривошип 17. Установка аппарата по высоте производится поворачиванием колесика 69. Поворачивание производится до тех пор, пока против указателя 74 не окажется деление с отметкой, соответствующей высоте точки, на которой стоит аппарат.
Установка аппарата в соответствии с нужным масштабом производится вставкой зубчатых колес 21, 22 с тем или иным передаточным числом.
Если отношение сечений горизонталей равно отношению знаменателей численных масштабов, то высотное колесико 69 должно
имгть другие надпяои. соответстиующие новому масштабу.
На этом подготовка аппарата к съемке и его установка заканчиваются. При движении тележки аппарат автоматически наиосит в иужном масштабе контуры, отметки горизонталей и проч. Если нужно произвести поверку работы, то, ос1ановив гелел:ку, ориеитируют JtocKy и решают задачу Потенота. Совпадение найденной точки с положением карандаша и соответствие высот укажут на правильность работы.
Предлагаемым аппаратом можно rpaqjii4eским способом переносить проект в натуру. Перенесение проекта мыслится с одновременной iiponaiuKoiJ границ, причем плуг прицепляется к тележк сзади. Увеличения мощности двигателя для. этой ие потребуется, так как перенесение будет происходить с меньшей скоростью движения тележки, чем другие работы. В результате перенесения проекта нужно будет только на поворотах границ поставить межевые знаки. Ускорение и удешевление работы будет громадное, ибо скорость иеренесенкя с пропашкой будет в несколько раз быстрее перенесения теперешними способами без пропашки.
Для производства этой работы на съемочный планшет наносится проект, графически вычисляются меры линий и азимуты этих линий. Это относится как к граничным линиям, так и к привязкам к опорной сети. ЗатеМ: став на пункте сети, ориентируют планшет, ставят карандаш в точку,, соответствующую точке местности, и, поставив кривошип по азимуту, прочитанному против указателя при подставке, пускают тележку в ход, изменяя направление движения до тех пор, пока карандаш не будет на прочерченной линии, а кривошип не будет показывать азимут линии, по которой нужно двигаться. Двигаясь таким образом и следя, чтобы карандаш не сошел с переносимой в натуру линии, доезясают до поворота, поворачивают аппарат и т. д. Работа будет точнее, если при ориентированной мензуле на опорной точке направление оси тележки будет совпадать с направлением, которое нулсно переносить. В этом случае азимут держится по кривошипу, а дли.на линии отсчитывается по счетчику, находяшемуся хотя бы на валу диска 26. Двилсение карандаша по линии, прочерченной на планшете, будет служить контролем работы.
Предмет изобретения.
. Аппарат для выполнения совместной горизонтальной и вэртикальной топографической съемки, снабженный установленным на тележке планшетом, расположенным под записывающим устройством, сочлененным с щлесами 1ележки посредством фрикционной передачи с переменным отношением, определяемым качающи.мся грузом, с целью вычерчивани линий пропорционально их проекциям на горизонтальную плоскость, причем колеса тележки предназначены для учета азимута направления движения при помош,и диференциального механнама дли регистрации разности скорости вращения колес, отличающийся тем, что, с целью координирования отдельных коррекциоиных движений карандаш укреплен в центре рамы 48, установленной со свободой перемещения как в направлении движения аппарата, так и в направлении ему перпендикулярном, Д.7Я чего рама 48 сочленена, с одной стороны, с механизмом для учета влияния углов наклона а с другой сторонь. с механизмом для учета азимута.
2. Форма выполнения аппарата по п. 1, отличающаяся тем. что служащий для сообщения раме .5 продольного перемещения стержень 47 посредством зубчатой передачи сочленен с валом 40; на котором установлено со свободою передвижения фрикционное колесико 38, укрепленное на движущейся в вертикальной направляющей крестовине 42, 43, сочлененной посредством горизонтального паза 44 и кривошипного устройства 17 с механизмом для учета азимута, причем колесико 38 сцеплено с фрикционным диском 36, свяанныы с механизмом для учета углов наклона, с целью придания раме 48 надлежатцей ско1:)ости движения.
8. Форма выполнения аппарата по п. 2, отличающаяся тем, что для придания диску 36 раз ичной скорости вращения, в зависнмос.ти от величины угла наклона, на ва.лу диска 36 насажен со свободой продольноо передвижения фрикционный диск 26. находящийся в сцеплении с ведущим диском 25, еоединеьиым посредством той или иной передаче, с одним из колес тележки, причем муфта диска 26 посредством зубчатой рейки сцеплена с зубчатым барабаном 2J, свободно насажен ным на ось диска 25 п предназначенным поворачиваться при ПОМ01ЦИ рейки 33, сочлене; ной с качающимся.грузом.
4.Форма выполнения аппарата по п. 1, отличающаяся тем. что предназначенный д.п.ч продольного перемещения колесика 39 кривошип 77 посредством зубчатой передачи сочленен с несущим шэстерни 11. 12, 13, 14. кривошипом 10. расположенным внутри ше «терни Я совместно с каковой кривоши 10 (оставляет механизм д.та учета азимута.
5.Форма выполнения аппарата по п. 1. отличающаяся тем, что предназначенная для сообщения раме 48 поперечного движения креотовнна 57 посредством той или иной передачи сочленена с валом 62, на котором со свободой продольного продвижения установлено колесико 39, укр пленное на связанной с кривошипом 17 крест,|ВИне 57, причем колесико 39 сцеплено с фрикционным диском 37. находящимся в сцепление; с диском 36.
6.Аппарат по пп. 1-5, отличающийся применением приспособ.чения для отметки горизонталей в виде электромагнитного прибора, предназначенного делать наколы в точках пересечения горизонталей с контуром и наносить номера горизонталей при замыкании контактов 21 или 22 вращением контак1ного колесика 69. сочлененного как с фрикционным диском 25, так и с качающимся грузом, служащим при наклоне местности для смещения относительно центра диска 25, сочленяющетт) диск с колесиком 68 колесика 65.

| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический прибор для съемки плана и профиля пройденного пути | 1933 |
|
SU42702A1 |
| Аппарат для измерения площадей на местности | 1932 |
|
SU40591A1 |
| Прибор для съемки плана и профиля маршрута | 1923 |
|
SU1706A1 |
| Прибор для мензульной съемки | 1925 |
|
SU31626A1 |
| Автоматический прибор для геодезических съемок | 1933 |
|
SU40593A1 |
| Прибор для производства городских и дорожных съемок | 1930 |
|
SU19801A1 |
| Интегратор | 1938 |
|
SU56663A2 |
| Приспособление для ориентации машиниста в пути и подачи свистков | 1922 |
|
SU1236A1 |
| Автоматический прибор для вычерчивания плана и профиля пройденного пути | 1933 |
|
SU34162A1 |
| Прибор для прокладывания на карте пройденного пути | 1932 |
|
SU49853A1 |


