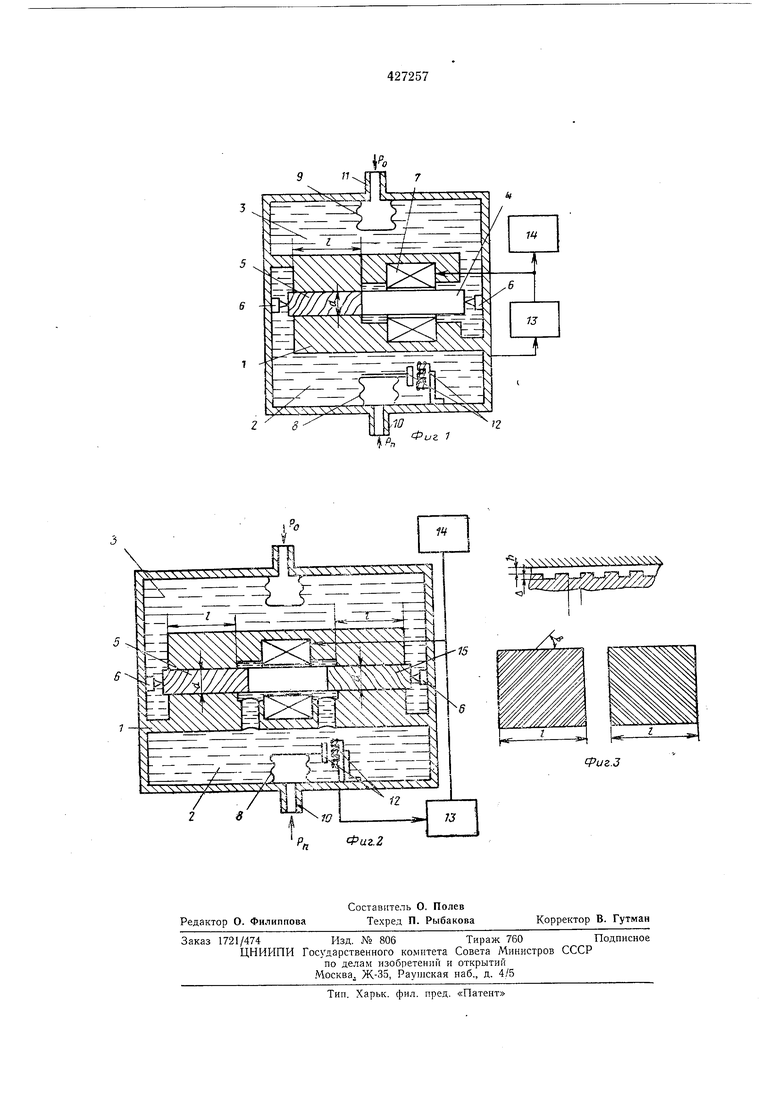
Изобретение относится к области контрольно-измерительной аппаратуры и предназначено для измерения давлений в системах нневмо- и гидроавтоматики, в частности судовой автоматики, в приборах для измерения уровня жидкости в различных судовых резервуарах, в навигационных приборах для измерения скорости и осадки судна - лагах и осадкомерах. Известные устройства аналогичного назначения обладают недостаточной точностью - результаты измерений с их помощью зависят от ориентанни прибора в пространстве. Пре,длагаемое устройство отличается тем, что герметнЧ|Ная камера разделена на две НОЛ01СТИ, заполненные нейтральной жидкостью, перегородкой, снабженной отверстием, в котором помещен цилиндрический стержень с нарезанной на нем винтовой поверхностью, являющийся ротором двигателя органа управления, причем измеряемое давление подведено к полостям герметичной камеры через унругие элементы (например, сильфон), с размещенным на одном из дих индикатором перемещения, электрически связанным с блоком управления, выход которого электрически соединен с блоком индикации и обмоткой статора двигателя. На . 1 изображена принципиальная схема нервого варианта предлагаемого устройства; на фнг. 2 - нри1щипиальная схема второго варнанта; на фиг. 3 - элементы вннтовой новерхностн (нрофнль винтовых канавок и развертка винтовых новерхностей). Устройство состоит из герметичного корнуса /, разделенного внутри па две полости 2 и 3, заполненные какой-либо нейтральней жидкостью (наприлгер, трансформаторным маслом). Полости 2 и 3 соедииены между собой отверстием со вставленным в него цилиндрическим стержнем 4, на котором нарезана винтовая поверх гость 5. Для предотвращения осевых перемещений стержня служат уноры 6. Стержень является ротором электродвигателя 7. Упругие элементы 8 п 9 (иапрнмер, сильфоны) нредназначены для нередачн внутрь полостей давлений, поступающих через входные щтуцера 10 и //. Перемещения одного из упругих элементов (например, 8) фиксируются нуль-индикатором 12, в качестве которото используется, например, индукционный следящий трансформатор. , снимаемые со следящего трансформатора, поступают в блок управления 13, где преобразуются и используются для управлепня работой электродвигателя 7. Блок индикации М предназначен для визуалыюй индикации измеряемых давлении и их дистаициоииой иередачи. На фиг. 2 представлен второй вариант предлагаемого устройства, которое отличается от первого только тем, что на стержле 4 нарезана пе одна винтовая поверхность, а две поверхности 5 и 15, соответствеино правого и левого шага, для разгрузки упоров 6 от осевых нагрузок, напри1мер, при измерении больших давлений. Принцип действия устройства основан на использовании насосного эффекта, возникаюшего в радиальном зазоре /г (с.м. фнг. 2 и 3) между винтовой поверхностью 5, образуе.мой канавками, нарезанными на стержне 4 и стенками отверстия. При этом величииа противодавления, возникаюшего при вращенин стержня, связана с УГЛОВОЙ скоростью этого вращения зависимостьюР..К, пе (О - угловая скорость вращения стержня - ротора двигателя -;; d - диаметр цилиндрического стержня I - активная длина стержня, часть его длины с нарезанными на ней канавнами, входящая в отверстие с зазором h (см); АР РП-РО - перепад давлений (кг1см }; l. - коэффициент динамической вязкости (кг сек/см }; К. - коэффициент пропорциоиальности, зависящий от |3 - угла подъема винтовой линии канавок; п - числа заходов винтовых линий и соотношения h - зазора и А - глубины канавок (см. фиг. 3) Устройство работает следующим образом. При равенстве давлений , поступающих через входные штуцера 10 и 11, давления в полостях 2 и 3 будут также равны. При этом перетекания жидкости в радиальном зазоре между стержием 4 и стенками отверстия в корпусе / происходить не будет, нуль-индикатор 12 будет находиться в согласованном положении, а напряжение, поступающее с него в блок управления, будет равно нулю. При появлении разности давлений сильфон 8 переместится (растянется или сожмется) из своего начального .положения, заставляя жидкость перетекать через радиальиый зазор из полости 2 в полость 5-(или наоборот). Перемеш,ение сильфона 8 приводит к появлению на нуль-индикаторе 12 сигнала рассогласования, который поступает в блок управления 13. Блок управления преобразует этот сигнал :в частоту или папряжейие питания исполнительного двигателя 7. При этом стержень т, играющий роль ротора двигателя 7, начнет вращаться с угловой скоростью, пропорцнональной частоте питающего .напряжения .(.в случае применения синхронного электродвигателя), ргли пронорциональной напряжению уиравления (в случае ири.менения асинхронного двигателя или двигателя постоянного тока), создавая с помощью ви гговых канавок, нарезанных на его поверхности, противодавление, величина которого онределяется в соответствии с формулой (1). Под действием этого противодавления жндкость начнет неретекать в обрат 1ом нанравлении, возвращая упругие элемеиты и 5 в исходное состояние и уменьшая сигнал рассогласования на нуль-индикаторе 12. При равенстве измеряемого и компенсирующего давлений неретекание жидкости прекратится и нуль-индикатор 12 вернется снова в согласовагнгое положение. При этом частота или напряжение питания, характеризующее скорость вращения двигателя, и соответственно создаваемое стержнем компенсирующее противодавление будут фиксироваться на шкалах блока индикации 14. Действие устройства в варианте, представленном на фиг. 2, будет аналогичным, за исключением того, что в связи с противоположным направлением осевых усилий, создаваемых частями стержня с канавками правого и левого щага, суммарное осевое усилие, действующее на стержень и прижимающее его к торцовым опорам, будет практически равно нулю, благодаря чему будут сняты вредные моменты трения на упорах 6. Предмет изобретения 1.Устройство для измерения давления, содержащее герметичную камеру с зпругими элемеитами, органы унравления и индикации, отличающееся тем, что, с целью увеличения точности и исключения влияния ориентации прибора в пространстве, в нем герметичная камера разделена на две полости, заполненные нейтральной жидкостью, перегородкой, снабженной отверстием, в котором помещен цилиндрический стержень с нарезанной на нем винтовой поверхностью, являющийся ротором двигателя органа управления, причем измеряемое давление подведено к полостям герметичной камеры через упругие элементы (например, сильфон) с размещенным на одном из них иидикатором перемещения, электрически связанным с блоком у1правления, выход KOTOiporo электрически соединен с блоком индикации И об-моткой статора двигателя. 2.Устройство по п. 1, отличающееся тем, что на цилиндрический стержень нанесены две винтовые поверхности с канавками левого и правого шага.
X
2
Фиг 1

| название | год | авторы | номер документа |
|---|---|---|---|
| Индикатор давления | 1980 |
|
SU991959A3 |
| Пневматический измерительный преобразователь теплотехнического параметра | 1973 |
|
SU508123A1 |
| Электродвигатель погружной установки для добычи пластовой жидкости и способ его изготовления и сборки | 2023 |
|
RU2815180C1 |
| Индикатор часового типа | 1988 |
|
SU1562665A1 |
| Пневмосъемное устройство для координатного измерителя параметров за рабочим колесом турбины | 1978 |
|
SU748153A1 |
| СПОСОБ КОНТРОЛЯ КРУТЯЩЕГО МОМЕНТА И ПНЕВМАТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2199099C2 |
| ГЕРМЕТИЧНЫЙ ЦЕНТРОБЕЖНЫЙ НАСОС | 1994 |
|
RU2114324C1 |
| УСТРОЙСТВО ДЛЯ РАСПРЕДЕЛЕНИЯ ЗАГРУЖАЕМЫХ СЫПУЧИХ МАТЕРИАЛОВ | 1999 |
|
RU2224799C2 |
| РОТОРНЫЙ ДВИГАТЕЛЬ КУРОЧКИНА | 1994 |
|
RU2099556C1 |
| ВЫВОДНОЕ УСТРОЙСТВО К ВЕСОВОМУ РАСХОДОМЕРУЖИДКОСТИ | 1970 |
|
SU287369A1 |