1
Изобретение относится к магнитным измерениям, в частности к магнитометрам, установленным на подвижных платформах.
Известно устройство для автоматической настройки компенсатора магнитных помех, содержандее источник компенсирующего напряжения, к выходу которого через регулятор подключена катушка компенсации, узел моделирования функции помехи и схему корреляции функции помехи с выходным сигналом магнитометра, к выходу которой подключен исполнительный механизм настройки. В качестве узла моделирования функции помехи используют навигационные приборы и датчики производных их выходных сигналов.
Такие устройства имеют высокий уровень нескомпенсированной помехи и низкую производительность работ по компенсации.
Цель изобретения - снижение уровня нескомпенсированной помехи и уменьшение времени настройки.
Для этого в предлагаемом устройстве узел моделирования функции помехи выполнен в виде преобразователя компенсирующего напряжения в сигнал переменного тока и детектора модулированного сигнала, цепь опорного сигнала которого подключена к преобразователю, вход - к выходу магнитометра, а выход - к входу схемы корреляции, причем вход преобразователя компенсирующего напряжения в сигнал переменного тока подключен к выходу источника компенсирующего напряжения, а выход - к катущке компенсации.
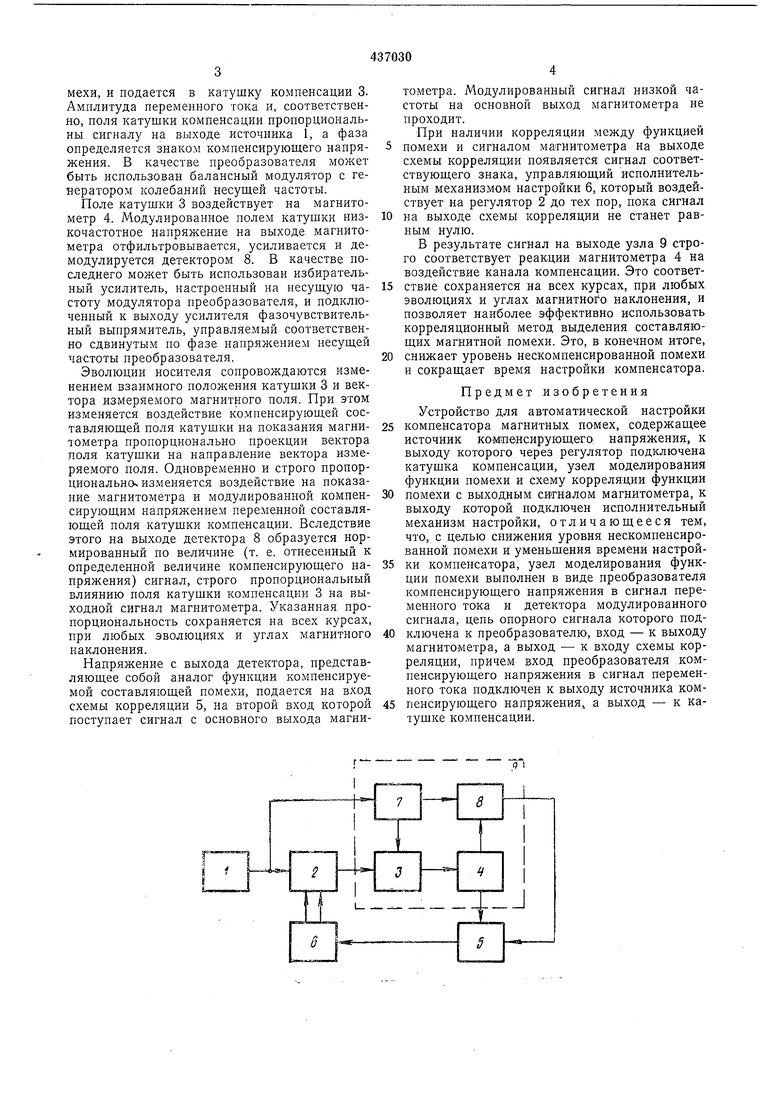
На чертеже изображена блок-схема предлагаемого устройства.
Устройство содержит источник компенсирующего напряжения 1, выход которого через регулятор 2 соединен с катушкой компенсации 3, действующей своим магнитным полем
на магнитометр 4. Выход последнего соединен с одним из входов схемы корреляции 5, выход которой подключен к исполнительному механизму настройки 6 регулятора 2. Вход преобразователя 7 соединен с выходом источника 1.
Выход преобразователя 7 подключен к катущке компенсации 3. Выход магнитометра 4 соединен с детектором 8, цепь опорного сигнала которого подключена к преобразователю 7, а выход - к второму входу схемы корреляции
5. Блоки 3, 4, 7 и 8, обведенные на чертеже пунктирной линией, образуют узел 9 моделирования функции помехи. Устройство работает следующим образом. Сигнал с выхода источника 1 поступает на
вход регулятора 2 и одновременно на вход преобразователя 7. С выхода последнего снимается низкочастотный переменный ток, частота которого (несущая частота) лежит в полосе пропускания магнитометра, но за пределами полосы частот полезного сигнала и по
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический компенсатор магнит-НыХ пОМЕХ | 1979 |
|
SU811179A1 |
| Способ измерения переменной магнит-НОй иНдуКции и уСТРОйСТВО для ЕгООСущЕСТВлЕНия | 1979 |
|
SU822093A1 |
| Магнитометр с устройством компенсации магнитных помех от носителя | 1977 |
|
SU693319A1 |
| Магнитометр | 1979 |
|
SU866519A1 |
| СПОСОБ КОМПЕНСАЦИИ ВНЕШНИХ МАГНИТНЫХ ПОЛЕЙ ПОМЕХ ПРИ СОЗДАНИИ МАГНИТО-РЕЗОНАНСНОГО ИЗОБРАЖЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2074401C1 |
| ФЕРРОЗОНДОВЫЙ МАГНИТОМЕТР И СПОСОБ ИЗМЕРЕНИЯ КОМПОНЕНТ ИНДУКЦИИ МАГНИТНОГО ПОЛЯ ПРИ ПОМОЩИ ВЕКТОРНОЙ КОМПЕНСАЦИИ | 2013 |
|
RU2539726C1 |
| СПОСОБ НАСТРОЙКИ КОМПЕНСАТОРА МАГНИТНЫХ ПОМЕХ | 1964 |
|
SU164134A1 |
| ВИБРАЦИОННЫЙ МАГНИТОМЕТР | 2004 |
|
RU2279689C2 |
| Устройство для измерения параметровпЕРЕМЕННОгО МАгНиТНОгО пОля | 1979 |
|
SU834630A1 |
| Феррометр для тонких магнитных пленок | 2022 |
|
RU2795378C1 |
