1
Изобретение относится к области геофизических исследований и может быть использовано в автоматических компенсаторах магнитных помех для магнитометра, установленного на подвижной платформе.
Известен компенсатор магнитных помех для магнитометра, установленного на подвижной платформе (самолет вертолет и т.п.) - Он со/ ержит вспомогательные компонентные магнитометры, схемы дифференцирования, распределительное устройство с органами настройки и устройство ввода поправ ки (например, компенсационные кольца) 1 .
Недостатком этого компенсатора является то, что он не обеспечивает автоматической настройки.
Известен также способ автоматической компенсации магнитных помех и устройство для его осуществления. Этот компенсатор содержит схему моделирования функции помех и схему автоматического формирования поправок 2} .
Недостатком этого устройства является то, что оно требует поочередной настройки компенсатора для компенсации различных составляющих помех, больших затрат летного времен и вследствие этого не обеспечивает высокой точности компенсации на произвольных курсах.
Наиболее близк;тм техническим решением к изобретению является автоматический компенсатор магнитных помех, содержащий помимо указанных выше блоков также схемы фильтрации
0 сигналов основного и вспомогательных компонентных магнитометров, сумматор, подключенный к выходу основного магнитометра, и автоматического формирования по5правок, первые входы которых соединены с выходом сумматора, вторые входы соединены через схемы масштабирования и через схемы дифференцирования с выходами схем фильтрации
0 сигналов компонентных вспомогательных магнитометрюв, а выходы схем автоматического формирования поправок соединены со входами сумматора.
5
Схемы автоматического формирования поправок выполнены в виде схем перемножения сигналов основного и вспомогательных магнитометров и потенциометра в цепи вво0да поправок с сервоприводом, цепь
управления которого подключена к в лходу схемы перемножения С31.
Настройку компенсатора выполняют в процессе периодических эволюции носителяопо углам крена: и тангажа. Сервопривод регулирует компенсирующий параметр до тех пор, пока корреляция сигналов основного и вспомогательного магнитометров станет равна нулю и сигнал на выходе сх-емы перемножения прекратится.
Устройство обеспечивает компенсацию на отдельном магнитном курсе, причём точность компенсации недостаточна, так как установившийся режим носит колебательный характер и остается нескомпенсированной часть помехи, коррелированная с эволюциями.
При изменение маршрута необходима новая автоматическая настройка компенсатора,. Принципиально возможно скомпенсировать помехи так, чтобы результат компенсации сохранялся на различных магнитных курсах, однако, для этого требуются дополнительные вычисления и ручные операции Ввиду невысокой точности компенсации помех на отдельном курсе требуются повторные операции и большие затраты летного времени.
Целью изобретения является повышение точности компенсации помех и сокращение времени измерения.
Поставленная цель достигается тем, что в автоматический компенсатор помех, содержащий основной и вспомогательные компонентные амагнитометры, схемы масштабирования и диффе ренцирования, распределительное устройство с исполнительными механизмами настройки, устройство вврда поправок, схемы фильтрации сигналов оеновного и вспомогательных компонентных магнитометров , сумматор, подключенный к выходу основного магнитометра, и схемы автоматического формирования поправок, первые входы которых соединены с выходом сумматора, вторые входы соединены через схемы масштабирования и схемы дифференцирования с выходами схем фильтрации сигналов компонентных магнитометров, а выходы соединены со входами сумматора, введены дополнительные схемы автоматического формирования поправок, схемы возведения в квадрат, схемы перемножения, блок памяти и блок вычисления коэффициентов, приче входы схем возведения в квадрат и первые входы схем Перемножения подключены к выходам схем фильтрации сигналов компонентных магнитометров, вторые входы схем перемножения подключены к выходам схем дифференцирования, подключенным к выходам схем фильтрации сигналов вспомогательных ма-гнитометров, а выходы схем возведения в квадрат и схем перемножения соединены со вторыми входами дополнительных схем автоматического формирования поправок, входы блока 1амяти подключены к выходам основного и вспомогательных компонентных магнитометров, а также к выходам схем автоматического формировь--ия поправок , .выходы блока памяти подключены ко входам блока-вычисления коэффициентов, а выходы блока вычисления коэффицентов соединены с цепями управления исполнительных механизмов настройки распределительного устройства.
Кроме того, схема автоматического формирования поправок выполнена в виде последовательно включенных частотно-импульсного модулятора (ЧИМ), широтно-импульсного модулятора (ШИМ), реверсивного счетчика и преобразователя кода в проводимость (ПКП), причем вход ЧИМ (первый вход схемы формирования поправок) соединен с выходом сумматора,управляющий вход ШИМ и аналоговый вход ПКП ( второй вход схемы формирования лоправок) подключены к выходу фильтр сигнала компонентного вспомогательного магнитометра, выход ПКП соедине со входом сумматора, а выход реверсиного счетчика - со входом блока памя
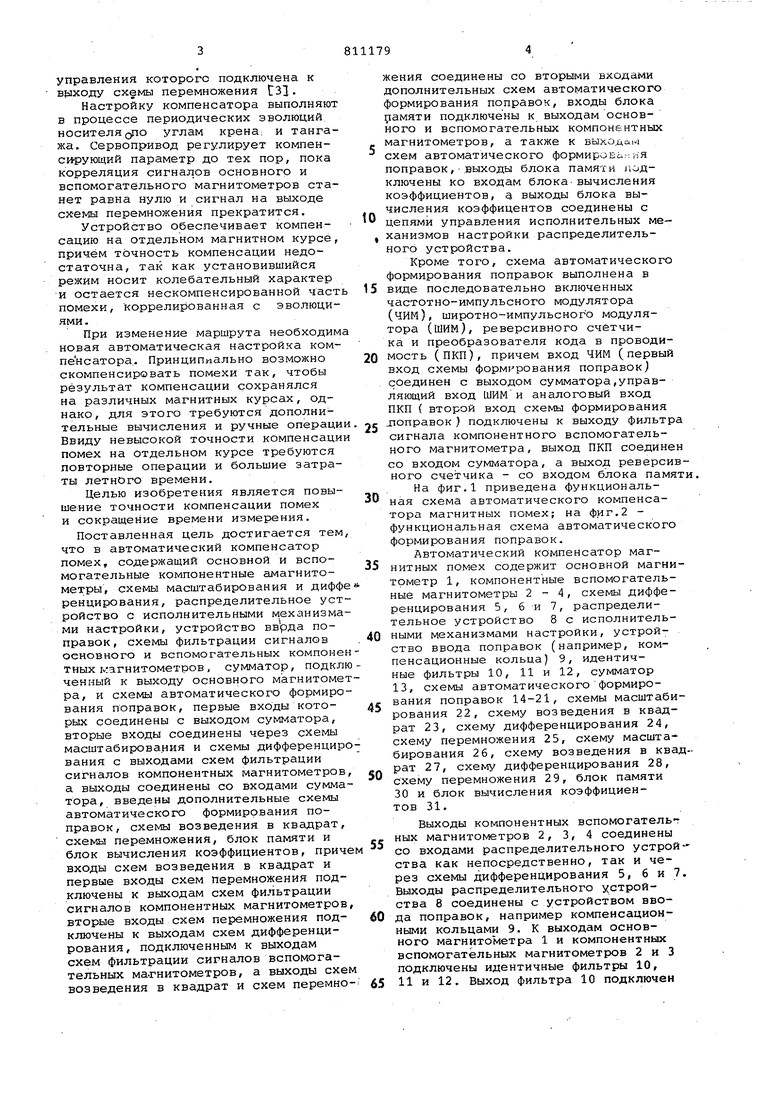
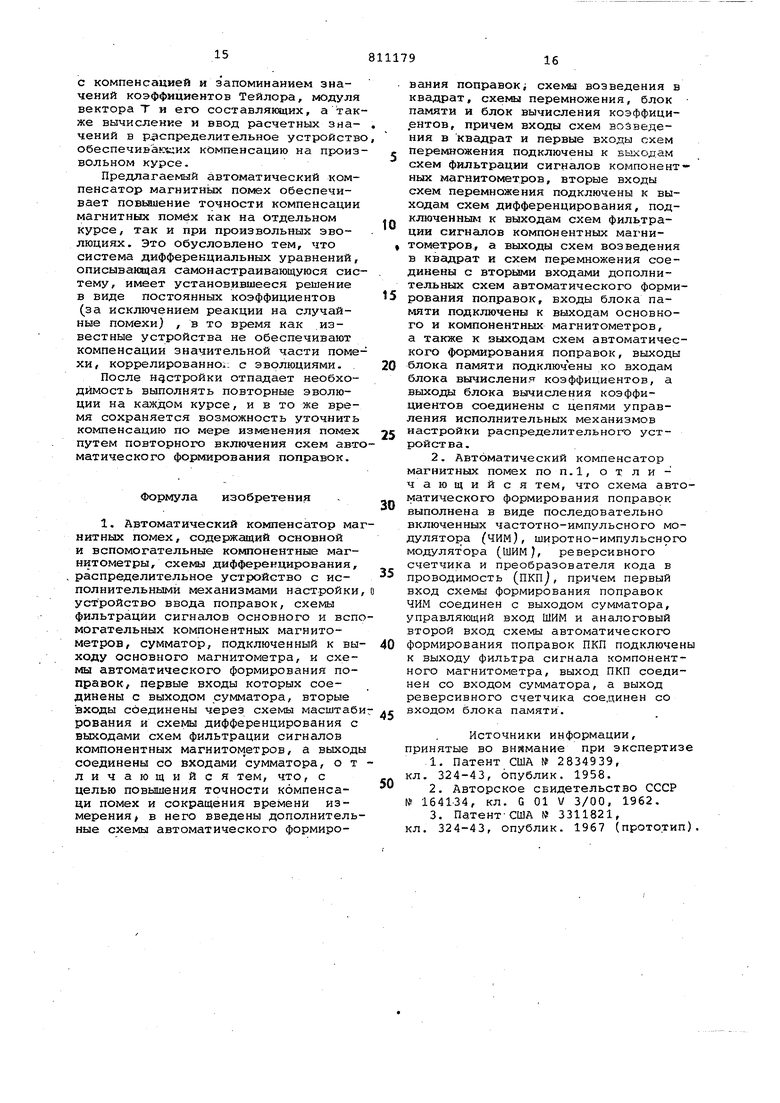
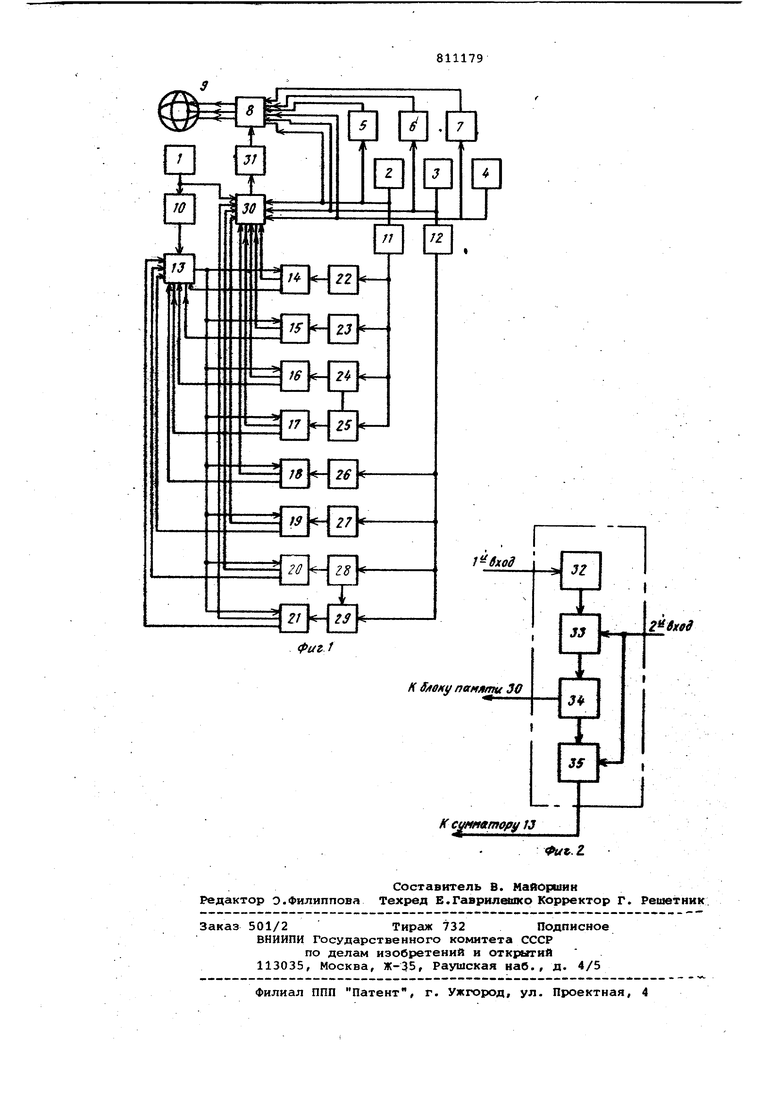
На фиг.1 приведена функциональная схема автоматического компенсатора магнитных помех; на фиг.2 функциональная схема автоматического формирования поправок.
Автоматический компенсатор магнитных помех содержит основной магнитометр 1, компонентные вспомогательные магнитометры 2-4, схемы дифференцирования 5, 6 и 7, распределительное устройство 8 с исполнительными механизмами настройки, устройство ввода поправок (например, компенсационные кольца) 9, идентичные фильтры 10, 11 и 12, сумматор 13, схемы автоматического формирования поправок 14-21, схемы масштабирования 22, схему возведения в квадрат 23, схему дифференцирования 24, схему перемножения 25, схему масшта бирования 26, схему возведения в кварат 27, схему дифференцирования 28, схему перемножения 29, блок памяти 30 и блок вычисления коэффициентов 31.
Выходы компонентных вспомогательт ных магнитометров 2, 3, 4 соединены со входами распределительного устрой ства как непосредственно, так и через схемы дифференцирования 5, 6 и 7 Выходы распределительного устройства 8 соединены с устройством ввода поправок, например компенсационными кольцами 9. К выходам основного магнитометра 1 и компонентных вспомогательных магнитометров 2 и 3 подключены идентичные фильтры 10, 11 и 12, Выход фильтра 10 подключен ко входу сумматора 13, а выход сумматора - к первым входам схем автоматического формирования поправок 14-21. Ко вторым входам схем формирования поправок 14-17 подключены соответственно выходы схемы масшта-: Ьирования 22, схемы возведения в квадрат 23, схемы дифференцирования 24 и схемы перемножения 25, входы которых подключены к выходу схемы фильтрации 11. Второй вход схемы перемножения 25 подключен к выходу схемы диффе нцирования 24. Ко вто. рым входам схем автоматического фор мирования поправок 18-21 подключены соответственно выходы схемы масштабирования 26, схемы возведения в квадрат 27, схемы дифференцирования 28 и схемы перемножения 29, вхо ды которых подключены к выходу филь ра 12. Второй вход схемы перемножения 2-9 подключен к выходу схемы дифференцирования 28. Выходы схем автоматического форм рования поправок 14-21 подключены к входам сумматора 13 и ко входам бло ка памяти 30, к другим входам которого подключены также выход основного магнитометра 1 и выходы компонентных вспомогательных магнитометр ров 2-4. Выходы блока памяти 30 под ключены ко входам блока вычисления коэффициентов 31. Выходы блока вычисления коэффициентов соединены с цепями управления исполнительных механизмов настройки распределительного устройства 8. Схема автоматического формирован поправок (фиг.2) включает частотноимпульсный модулятор 32, широтно-им пульсный модулятор 33, реверсивный счетчик.34 и преобразователь кода в проводимость 35. Функциональные узлы 32-35 соединены последовательно. Вход ЧИМ 32, являющийся первым входом схемы авто тического формирования 1 правок, со динен с выходом сумматора 13. Управ ляющий вход ШИМ 33 и аналоговый вхо ПКП 35, являющиеся вторым входом схе мы автоматического формирования поправок, подключены к выходу одной из функциональных схем 22-29 на выходе фильтра компонентного вспомо гательного магнитометра.Выход реверсивного счетчика 34 подключен к одному из входов блока памяти 30. Автоматический компенсатор магнитных помех работает следующим образом. В процессе выполнения периодичес ких эволюции носителя по углу крена или по углу тангажа на каком-либо курсе сигнал с выхода магнитометра 1, отфильтрованный в полосе частот фильтром 10, поступает на вход сумматора 13. На другие входы сумматора 13 поступают сигналы с .выходов схем автоматического формирования поправок 14-21. С выхода сумматора 13 сигнал магнитометра за вычетом поправок поступает на первые входы схем автоматического формирования поправок 14-21. На вторые входы схеьш 14-21 поступают отфильтрованные фильтрами 11 или 12, аналогичными фильтру 10, и преобразованные схемами 22-29 сигналы компонентных вспомогательных магнитометров 2 и 3. Перечисленные блоки 13-29 образуют многократную самонастраивающуюся систему автоматического регулирования, в которой каждый из контуров служит для компенсации одной из помех, которая коррелнрована с функцией помехи, моделируемой сигналом навыходах функциональных узлов 22-29. В процессе периодических Эволюции сигналы, формируемые схемами 14-21, вычитаются в сумматоре 13 из фильтрованного сигнала магнитометра 1 (описание работы схем автоматического формирования поправок приведено ниже). После завершения 3-4 периодов эволюции по крену и по тангажу сигнал на выходе сумматора 13 снижается до уровня, который определяется только той частью выходного сигнала магнитометра, которая не коррелирована с функциями помехи. Каждая схема автоматического формирования поправок (14-21) работает следующим образом. Сигнал с выхода сумматора 13 поступает на вход ЧИМ 32 и преобразуется в последовательность импульсов, частота которых пропорциональна входному сигналу. Сигнал, поступающий на вход ШИМ 33 с выхода функциональной схекы (одной из 22-29}г преобразуется в пропорциональную ему ширину импульсов, заполненных импульсами с частотой выходного сигнала ЧИМ. В результате на выходе ШИМ 33 образуется последовательность импульсов, средняя частота следования которых пропорциональна произведению сигнала с выхода сумматора 13 и сигнала с выхода одной из функциональных схем 22-29. Эта последовательность импульсов поступает на вход реверсивного счетчика 34, на выхсце которого образуется код, пропорциональный интегралу от произведения входных сигналов. Код с выхода реверсивного счетчика 34 поступает на кодовый вход преобразо вателя кода в проводимость 35. В ре зультате с выхода преобразователя кода в -проводимость на один из входов сумматора 13 поступает сигнал, пропорциональный произведению кода
на выходной сигнал соответствующего функционального преобразователя 122-29) . который подключен к аналоговому входу преобразователя кода в проводимость 35.
Накопление кода на выходе реверсивного счетчика происходит до тех пор, пока произведение сигналов с выхода сумматора 13 и функционального преобразователя станет равно нулю, т.е. коррелированная с заданно функцией помеха будет скомпенсирована. Сортветствующее компенсации значение кода реверсивного счетчика поступает для запоминания в блок памяти 30.
Аналогичным образом на выход блока памяти поступают коды с выхода других схем формирования поправок 14-21 и запоминаются одновременно с соответсувукхцими им значениями модуля вектора и составляющих вектора индукции магнитного поля, поступающими на бяок памяти с выхода основного 1 и компонентных вспомогательных магнитометров 2, 3 и 4,
После автоматической настройки первые входы схем автоматического формирования поправки включают и компенсатор продолжает работать. в установившемся режиме.
Изменение курса (кроме небольших угловых колебаний по углу рыскания) будет сопровождаться нарушением компенсации, которое определяется соотношением различных составляющих помех, поэтому при смене курса компенсатор вновь включают в режим автоматической настройки.
Для обеспечения компенсации в установившемся режиме на произвольном курсе осуществляют автоматическую настройку компенсатора на различных курсах (например, на четырех главных магнитных курсах) с запоминанием каждого результата компенсации в блоке памяти 30.
После завершения автоматической компенсации на различных курсах результаты компенсации с выхода блока памяти 30 поступают на вход блока вычисления коэффициентов 31,
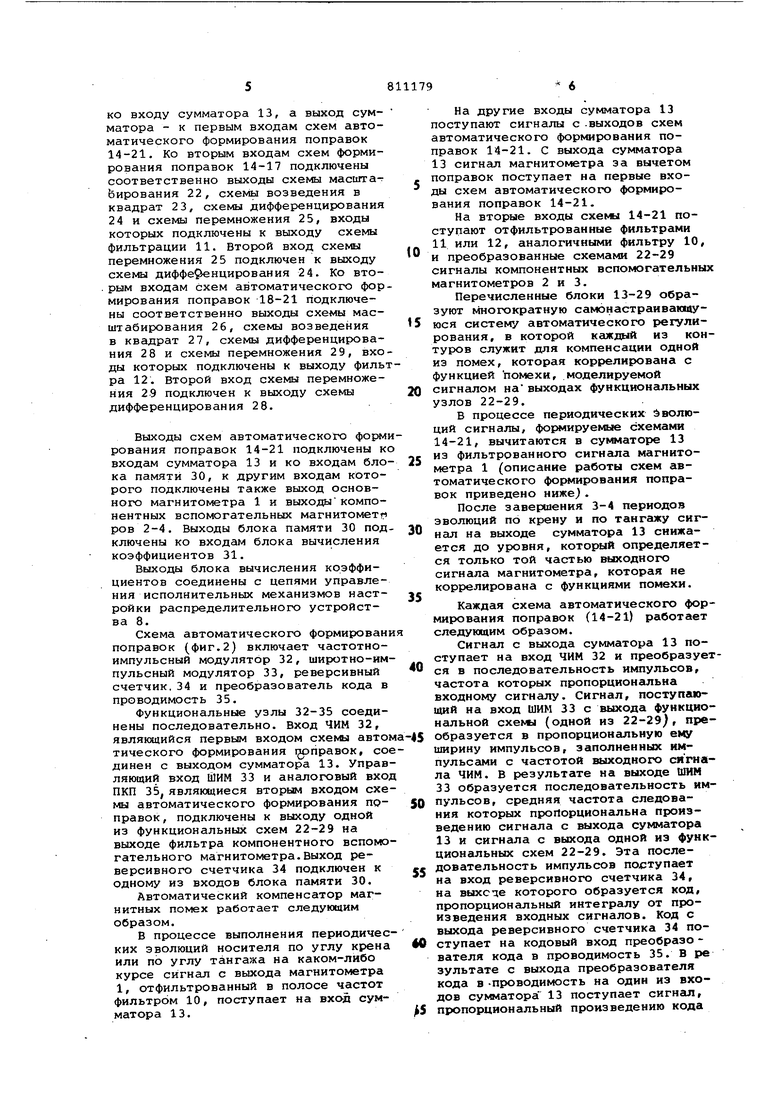
Составляющие вектора индукции магнитного поля ферромагнитных масс и вихревых токов носителя в объеме чувствительного элемента магнитометра
Составляющие
., .- iyy iz fxlr fylt -frjtкоторый вычисляет значения коэффи- диентов Пуассона, характеризующие магнитные помехи ферромагнитные-, масс, а также значения коэффициентов вихревых токов.
Указанные значения в цифровой форме поступают на исполнительные механизма настройки распределительного устройства 8. в качестве исполнительных механизмов могут быть использованы преобразователи кода в проводимость цепей питания компенсационных колец 9. Благодаря этому в объеме, занимаемом магнитометром 1, с помощьюкомпенсационных колец 9 создаются составлякяцие магнитного поля, компенсирующие соответствующие составляющие магнитных помех подобно тому, как этоосуществляют при ручной настройке компенсатора.
При этом схегы автоматического формированияпоправок 14-21 отключают. Законы регулирования компенсационных токов соответствуют законам изменения магнитного поля помех, благодаря чему компенсация достигается на произвольном курсе, а также при изменении района магнитной съемки. Значения коэффициентов записывают -в блок пайяти 30
После завершения цикла ко№1ё«сации помех койпенсатор может быть вновь включен в режим автоматической настройки для дополнительной компенсации помех на отдельных курсах.
Результаты компенсации на ряде курсов могут быть вновь пересчи-. таны в значения коэффициентов Пуассона для корректировки ранее установленных значений..
Блок памяти должен сохранять информацию при отключении и повторном включении питания.
Теоретические основы работы автоматического компенсатора магнитных помех состоят в следующем.
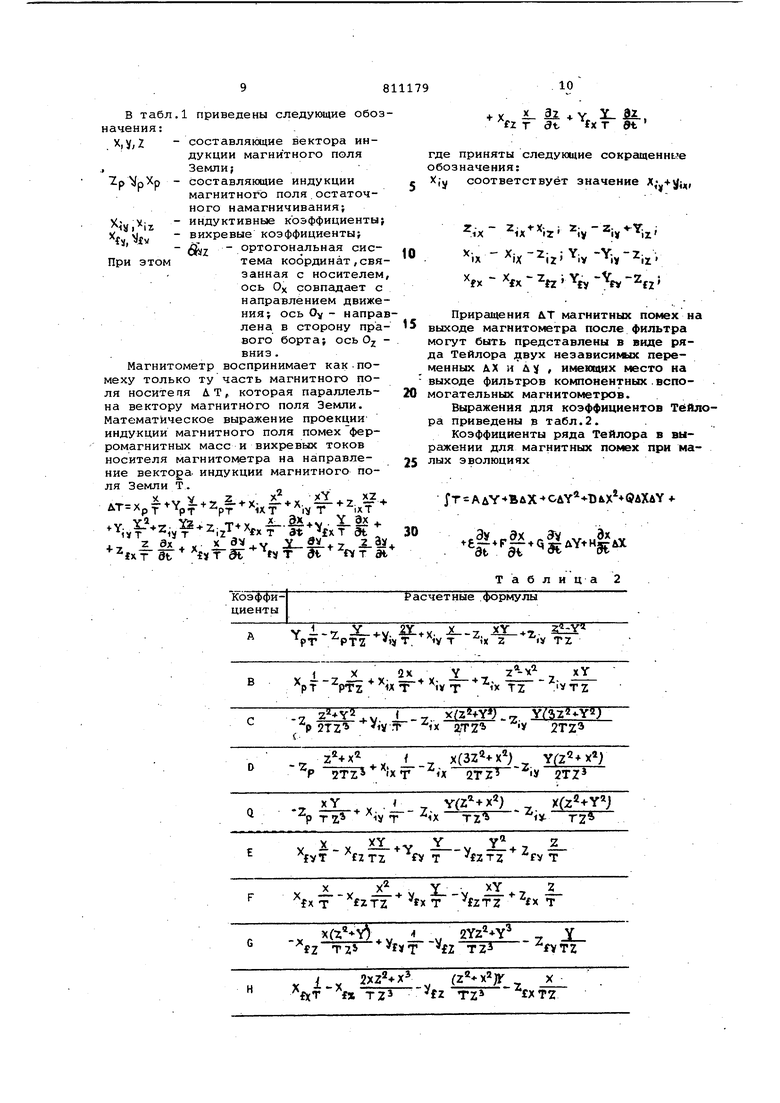
Магнитное поле носителя в объеме занимаемом магнитометром, характеризуется тремя составляющими вектора магнитной индукции, выражения дл которых приведены в табл.1.
ц
Т а б л и
Расчетные формулы в табл.1 приведены следукнцие обозначения:)У;2 - составляющие вектора индукции магнитного поля ., Земли; р - составляющие индукции магнитного поля остаточного намагничивания} -индуктивные коэффициенты -вихревые коэффициенты; ,fv . - ортогональная сисПри этом тема координат,связанная с носителем, ось Ох совпадает с направлением движения; ось Оу - направлена в сторону пра- 5 вого борта; ось О;, - . вниз. Магнитометр воспринимает как-помеху только ту часть магнитного поля носителя Л Т, которая параллельна вектору магнитного поля Земли. Математическое выражение проекции индукции магнитного поля помех ферромагнитных масс и вихревых токов носителя магнитометра на направление вектора- индукции магнитного поля Земли Т. AT Xp -Yp 2pf--X-,|-.X,.2,;f.Y. ..т4У. A-.M+V.. -7 -il., + v -s- il Т at at Т «|-f-«flr , где обо J Х,-у вых мо да мен вых 20 мог ра раж 25 лых ; tX, 2L |1 ФУ, i- |i., fz Т at- fX т 9t приняты следующие сокращенные значения: соответствует значение Х,,, 1Х- 2,,j.i Ziy-Zi - Y; ; NX iy V -V - fy fv f2 Приращения ЛТ магнитных помех на оде магнитометра после фильтра ут быть представлены в виде ряТейлора ;9вух независимых переных АХ и лу , имекхаих место на оде фильтров компонентных.вспоательных магнитометров. Выражения для коэффициентов TeiiUioприведены в табл.2. Коэффициенты ряда Тейлора в выении для магнитных помех при маэволюцияхT )fcX 9AX4Y €- aTK -sТаблица 2
| название | год | авторы | номер документа |
|---|---|---|---|
| Магнитометр с устройством компенсации магнитных помех от носителя | 1977 |
|
SU693319A1 |
| Устройство для компенсации магнитных помех носителя магнитометра | 1976 |
|
SU620920A1 |
| НАВИГАЦИОННЫЙ МАГНИТОМЕТР (ВАРИАНТЫ) | 2007 |
|
RU2352954C2 |
| Автоматический компенсатор магнитных помех | 1982 |
|
SU1103173A1 |
| НАВИГАЦИОННЫЙ МАГНИТОМЕТР (ВАРИАНТЫ) | 2020 |
|
RU2747015C1 |
| СПОСОБ РАЗДЕЛЕНИЯ МАГНИТНЫХ ПОМЕХ НОСИТЕЛЯ МАГНИТОМЕТРА | 1991 |
|
RU2047873C1 |
| НАВИГАЦИОННЫЙ ТРЁХКОМПОНЕНТНЫЙ ФЕРРОЗОНДОВЫЙ МАГНИТОМЕТР | 2020 |
|
RU2730097C1 |
| ФЕРРОЗОНДОВЫЙ АЭРОМАГНИТОМЕТР | 1991 |
|
RU2019860C1 |
| Устройство для магнитных измерений с компенсацией помех от ускорений | 1982 |
|
SU1056091A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАГНИТНОЙ ДЕВИАЦИИ НА ПОДВИЖНОМ ОБЪЕКТЕ | 2022 |
|
RU2796372C1 |
fxT Л TZ fZ TZ XTZ Автоматическаякомпенсация магни ных помех на каждом отдельном курсе осуществляется путем модулирования и ввода поправки в показания магни тометра в соответствии с выражением для ряда e lлopa. Эта поправка вводитЬя через сумматор 13 с помощью схем автоматичес кого формирования поправок 14-21, каждая из которых служит для компен сации одного из членов ряда ТейлоР 3Y Функции помехи ЛУ Д Y ; Л 9t ot и др.)формируются на выходе схем 22-29. Схемы автоматического формирования поправок формируют весовые коэффициенты (т.е. коэффициенты Тей лора) А, В и т.д. , с которыми поправки поступают на входы сумматора 13. Численные значения коэффициентов Тейлора, при которых достигается ком пенсация помех на определенном курсе с выхода реверсивного счетчика 34, поступают на входы блока памяти 30. Если для компенсации на каком-либо курсе достаточно воспроизвести влияние помехи на магнит-ометр в виде ряда Тейлора, то для компенсации помех на произвольном курсе необходимо воспроизвести влияние помех в соотве ствии с вырс жением (1) . Это осуществляется с помощью блоков 2-9. Задача настройки компенсатора состоит в том, чтобы определить составляющие магнитных помех (значения) постоянного намагничения, коэффициенты, характеризующие индуктивное намагничение и поля вихревых токов и уста новить значения составляющих с помощью исполнительных органов настро ки распределительного устройства 8.
/д Ю А270ч 11. /н90 д270.Гет13
( . 4cosiJ ее- с ; „,
V
.00 -JTOpT inM , (Л ornaVl (« ; глеап
/ дО вО i 4 f. V I
( 2oos3 I b J 2cosa
Таблица .
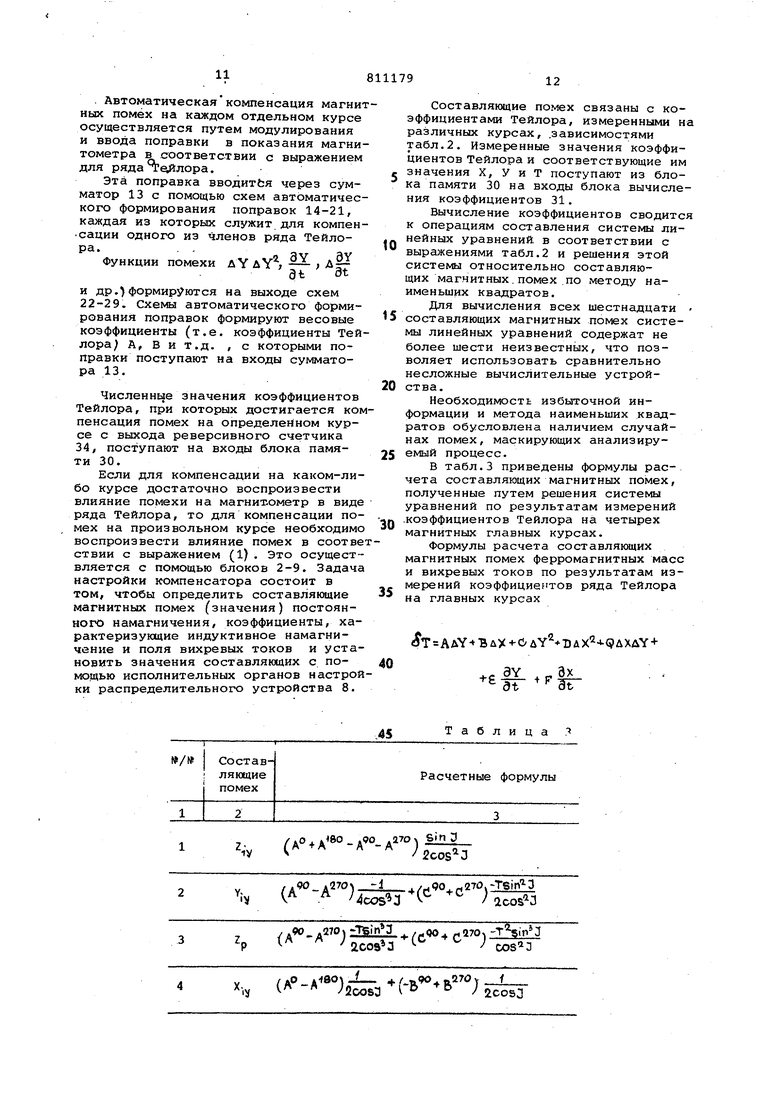
90 B270v f Составляющие помех связаны с коэффициентами Тейлора, измеренными на различных курсах, .зависимостями табл.2. Измеренные значения коэффициентов Тейлора и соответствующие им значения X, У и Т поступают из блока памяти 30 на входы блока вычисления коэффициентов 31, Вычисление коэффициентов сводится к операциям составления системы линейных уравнений в соответствии с выражениями табл.2 и решения этой системы относительно составляющих магнитных, помех .по методу наименьших квадратов. Для вычисления всех шестнадцати составляющих магнитных помех системы линейных уравнений содержат не более шести неизвестных, что позволяет использовать сравнительно несложные вычислительные устройства. Необходимость избыточной информации и метода наименьших квадратов обусловлена наличием случайнах помех, маскирующих анализируемый процесс. В табл.3 приведены формулы расчета составляющих магнитных помех, полученные путем решения системы уравнений по результатам измерений .коэффициентов Тейлора на четырех магнитных главных курсах. Формулы расчета составляющих магнитных помех ферромагнитных масс и вихревых токов по результатам измерений коэффициентов ряда Тейлора на главных курсах ВйХ -СuY DAX -(9AXAY +
13
(Ъ° « ) Si ll3 4/B9o B)
.,,
бz-x
40053 P2Tsin3
7 - X
1Х
/ до f д90 д2ТО) Л ( 2oos
....() -г
РСТ&йЗ
ix, %- сиО-лво .J
-20. соаЗ
P2Tein3
(
Z
(
()
(.).
13
Чзг
14 Y Ce° e«°-e -e-) (),
(-D D)
16 X
fx
о
17 X (D°-D)
18 x, (-D°-D -D D)
A - значение коэффициента на
магнитном курсе
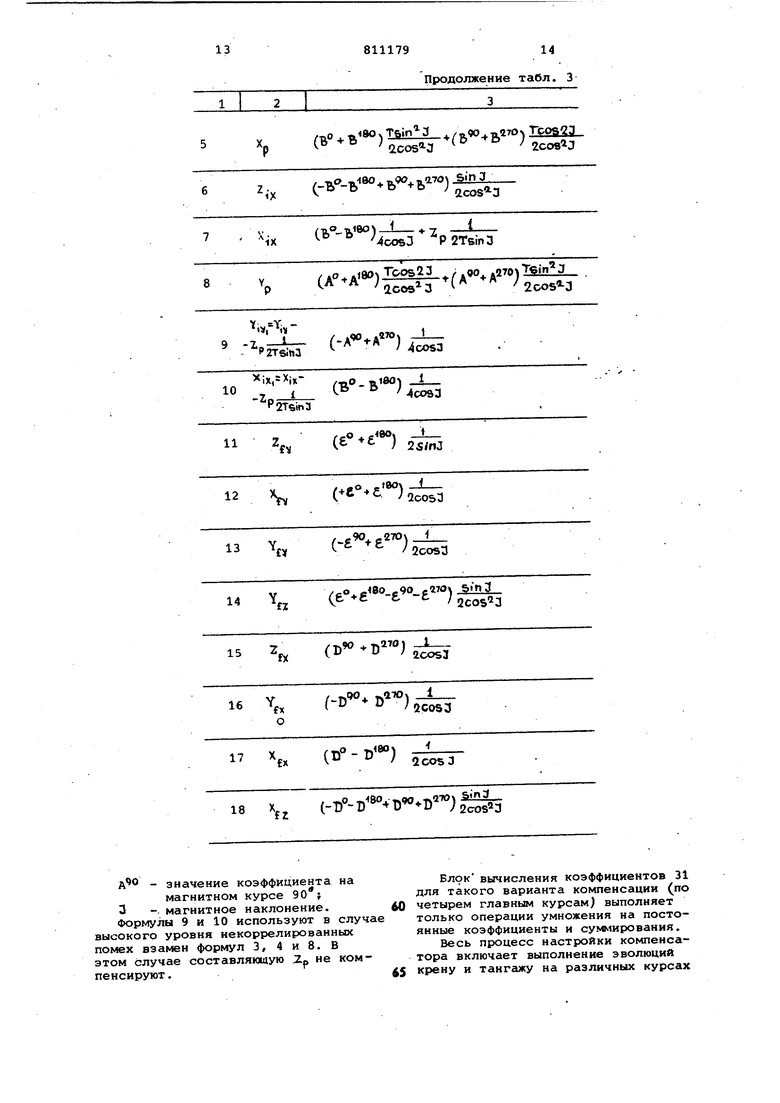
3 -, магнитное наклонение. Формулы 9 и 10 используют в случае высокого уровня некоррелированных помех взамен формул 3, 4 и 8. В этом случае составляющую 2.а не компенсируют.
81117914
Продолжение табл. 3
4cos3
о -чво. L
2s/nJ
/20083
2COS3
T,eo) ±
2cos3
,in3
Блок вычисления коэффициентов 31 лля такого варианта компенсации (по четырем главным курсам) выполняет только операции умножения на постоянные коэффициенты и су « 1ирования.
Весь процесс настройки компенсатора включает выполнение эволюции крену и тангажу на различных курсах с компенсацией и запоминанием значений коэффициентов Тейлора, модуля вектора Т и его составляющих, а так же вычисление и ввод расчетных значений в распределительное устройств обеспечивакких компенсацию на произ вольном курсе. Предлагае ий автоматический компенсатор магнитных помех обеспечивает повьшзение точности компенсации магнитных помех как на отдельном курсе, так и при произвольных эволюциях. Это обусловлено тем, что система дифференциальных уравнений, описывающая самонастраивающуюся сис тему, имеет установившееся решение в виде постоянных коэффициентов (за исключением реакции на случайные помехи) , в то время как известные устройства не обеспечивают компенсации значительной части поме хи, коррелированно;: с эволюциями. После настройки отпадает необходимость выполнять повторные эволюции на каждом курсе, и в то же время сохраняется возможность уточнить компенсацию по мере изменения помех путем повторного включения схем авт матического формирования поправок. Формула изобретения 1. Автоматический компенсатор ма нитных помех, содержащий основной и вспомогательные компонентные нитометры, схемы дифференцирования, распределительное устройство с исполнительными механизмами настройки устройство ввода поправок, схемы фильтрации сигналов основного и всп могательных компонентных магнитометров, сумматор, подключенный к вы ходу основного магнитометра, и схемы автоматического формирования поправок, первые входы которых соединены с выходом сумматора, вторые входы соединены через схемы масштаб рования и схемы дифференцирования с выходами схем фильтрации сигналов компонентных магнитоги1етров, а выход соединены со входами сумматора, от личающийся тем, что, с целью повышения точности компенсаци помех и сокращения времени измерения в него введены дополнитель ные схемы автоматического формирования поправокi cxeivaa возведения в квадрат, схемы перемножения, блок и блок вычисления коэффициентов, причем входы схем возведения в квадрат и первые входы схем Перемножения подключены к выходам схем фильтрации сигналов компонентных магнитометров, вторые входы схем перемножения подключены к выходам схем дифференцирования, подключеннь к выходам схем фильтрации сигналов компонентных магнитометров, а выходы схем возведения в квадрат и схем перемножения соединены с вторыми входами дополнительных схем автоматического формирования поправок, входы блока памяти подключены к выходам основного и компонентных магнитометров, а также к выходам схем автоматического формирования поправок, выходы блока памяти подключены ко входам блока вычисления коэффициентов, а выходы блока вычисления коэффициентов соединены с цепями управления исполнительных механизмов настройки распределительного устройства. 2. Автоматический компенсатор магнитных помех поп.1, отличающийся тем, что схема автоматического формирования поправок выполнена в виде последовательно включенных частотно-импульсного модулятора (ЧИМ), широтно-импульсного модулятора (ШИМ, реверсивного счетчика и преобразователя кода в проводимость (ПКПj, причем первый вход схемы формирования поправок ЧИМ соединен с выходом сумматора, управляющий вход ШИМ и аналоговый второй вход схемы автоматического формирования поправок ПКП подключены к выходу фильтра сигнала компонентного магнитометра, выход ПКП соединен со входом сумматора, а выход реверсивного счетчика соединен со входом блока памяти. Источники информации, принятые во внимание при экспертизе 1.Патент США № 2834939, кл. 324-43, опублик. 1958. 2.Авторское свидетельство СССР № 164134, кл. G 01 V 3/00, 1962. 3.ПатентСША 3311821, кл. 324-43, опублик. 1967 (прототип).
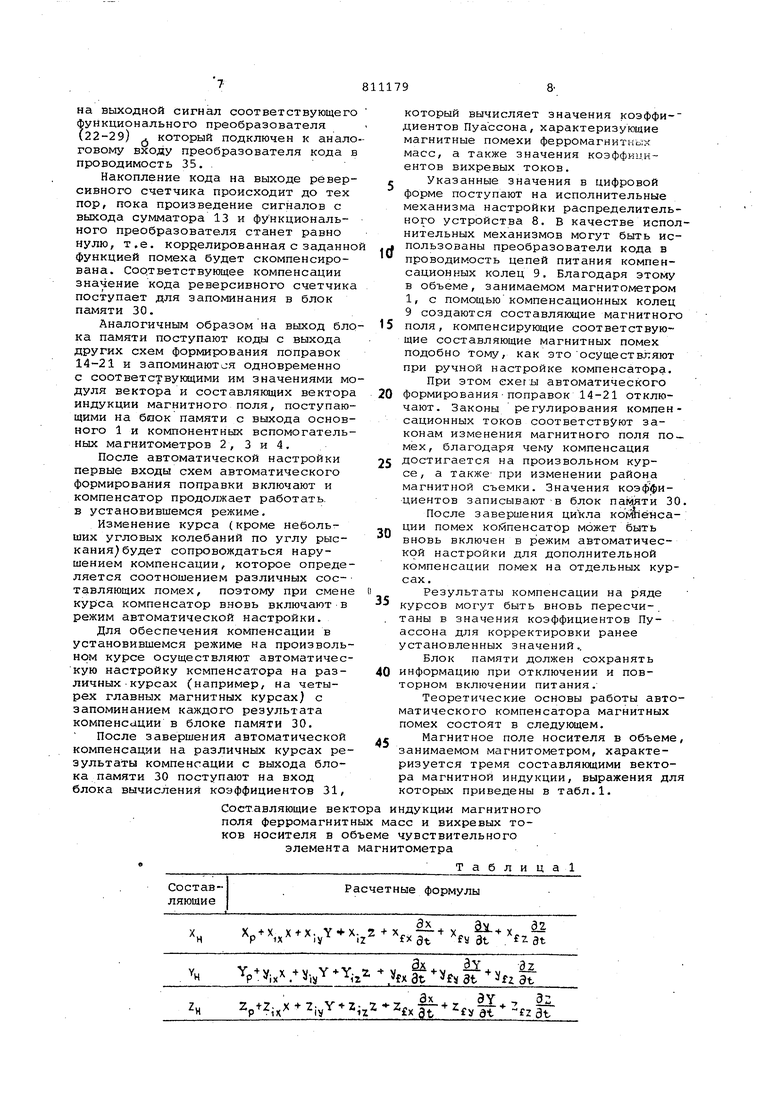
(puzf
У1
К SAOMy памяти 30
J
