(54) СПОСОБ ВИЗУАЛИЗАЦИИ СИГНАЛОВ ДЕФЕКТОСКОПОВ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для отображения дефектов исследуемого объекта на экране электронно-лучевой трубки /ЭЛТ/ | 1981 |
|
SU1008779A1 |
| Способ визуализации стыка и шва при сварке электронным пучком и устройство для его осуществления | 1987 |
|
SU1496960A1 |
| Осциллографический регистратор одиночных электрических импульсов | 1982 |
|
SU1108880A1 |
| Телевизионное устройство контроля наблюдаемых объектов | 1979 |
|
SU860347A1 |
| УСТРОЙСТВО ВВОДА ГРАФИЧЕСКОЙ ИНФОРМАЦИИ | 1973 |
|
SU368629A1 |
| Акустический микроскоп для оперативного просмотра объекта | 1990 |
|
SU1777071A1 |
| Устройство автоматической коррекции координатных искажений телевизионного изображения | 1981 |
|
SU1012456A1 |
| Магнитографический дефектоскоп | 1979 |
|
SU855480A1 |
| Устройство для ввода и вывода цветной графической информации | 1986 |
|
SU1348873A1 |
| Прецизионное сканирующее устройство | 1989 |
|
SU1714564A1 |
1
Изобретение относится к области неразрушающего контроля материалов и изделий и может быть использовано при радиационной дефектоскопии.
Известен способ визуализации сигналов дефектоскопов с построчным сканированием зоны дефектоскопии, заключающийся в том, что сигналы преобразовывают в последовательность импульсов, запоминают многоадресным регистратором и воспроизводят на экране электронно-лучевого индикатора со строчной и кадровой разверткой луча.
Однако надежность и точность визуализации известным способом при дефектоскопии движущихся предметов недостаточны, так как он не предусматривает синхронизацию процесса запоминания и воспроизведения сигналов с параметрами движения предмета.
Целью изобретения является повышение надежности и точности визуализации при дефектоскопии движущихся предметов.
Для этого фиксируют дискретно датчиком изменение координат предмета, каждую последующую и предыдущую строки запоминают и воспроизводят по очередному сигналу датчика, а кадровая развертка запускается по сигналу адреса последней строки.
Способ поясняется чертежом.
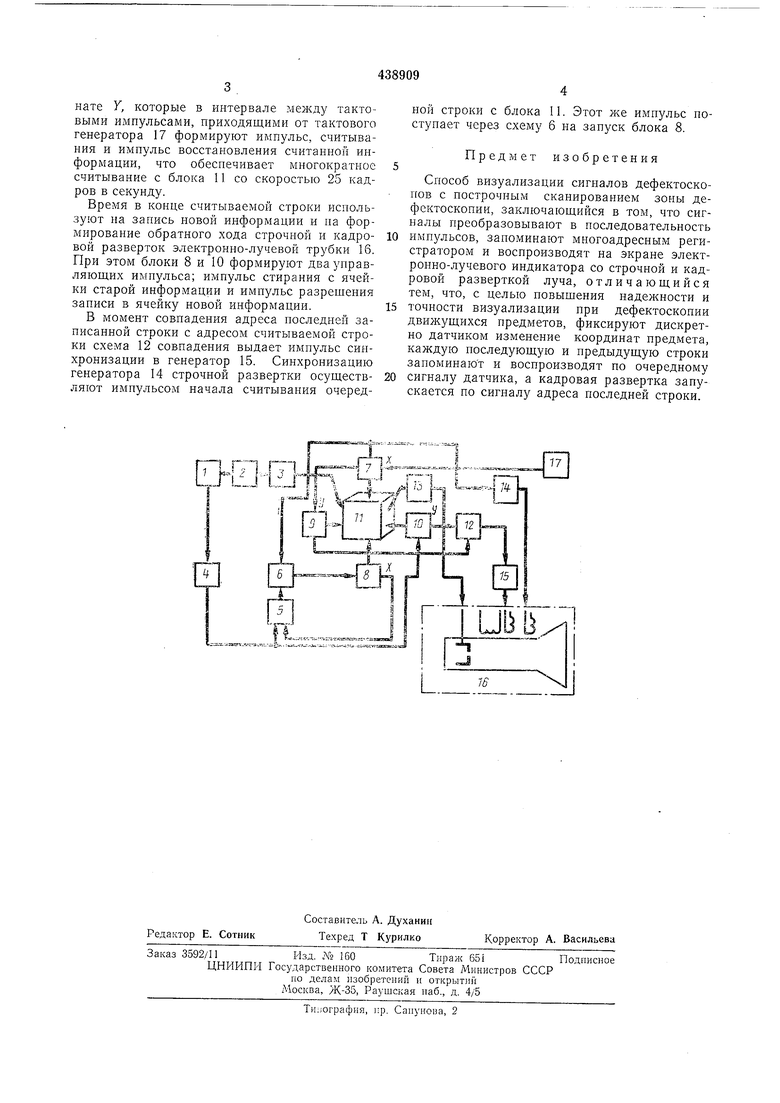
Интроскоп, реализующий предлагаемый способ, содержит источник 1 излучения, приемник 2, согласующее устройство 3, датчик 4 изменения координат предмета, триггер 5, схему 6 совпадения, блок 7 формирования адреса считывания по координате X, блок 8
формирования адреса записи по координате , блок 9 формирования адреса считывания по координате Y, блок 10 формирования адреса записи по координате Y, блок 11 памяти, схему 12 совпадения, модулятор 13, генетор 14 строчной развертки, генератор 15 кадровой развертки, электронно-лучевую трубку 16 и тактовый генератор 17.
Сигнал от приемника 2 излучения через согласующее устройство 3, в котором аналоговый сигнал преобразуют в цифровой код, записывают построчно в блок i 1 памяти синхронно со сканированием источника 1 излучения, расположенного в блоке сканирования движущего изделия. Датчик 4 изменения координат регистрирует перемещение детали и выдает в блок 10 формирования адреса записи по координате Y импульсы разрешения записи в следующую строку блока 11, а через триггер 5 и схему 6 совпадения разрешает
запуск блока 8 формирования адреса записи по координате X.
Построчным считыванием информации с блока 11 управляют блок 7 формирования адреса считывания по коордииате X и блок 9
формирования адреса считывания по координате 7, которые в интервале между тактовыми импульсами, приходящими от тактового генератора 17 формируют импульс, считывания и импульс восстановления считанной информации, что обеспечивает многократное считывание с блока 11 со скоростью 25 кадров в секунду.
Время в конце считываемой строки используют на запись новой информации и па формирование обратного хода строчной и кадровой разверток электронно-лучевой трубки 16. При этом блоки 8 и 10 формируют два управляющих импульса; импульс стирания с ячейки старой информации и импульс разрешения записи в ячейку новой информации.
В момент совпадения адреса последней записанной строки с адресом считываемой строки схема 12 совпадения выдает импульс синхронизации в генератор 15. Синхронизацию генератора 14 строчной развертки осуществляют импульсом начала считывания очеред . --г-аЕ- --.---™ FJ «-J-J ti
ной строки с блока 11. Этот же импульс поступает через схему 6 на запуск блока 8.
Предмет изобретения
Способ визуализации сигналов дефектоскопов с построчным сканированием зоны дефектоскопии, заключающийся в том, что сигналы преобразовывают в последовательность импульсов, запоминают многоадресным регистратором и воспроизводят на экране электронно-лучевого индикатора со строчной и кадровой разверткой луча, отличающийся тем, что, с целью повышения надежности и точности визуализации при дефектоскопии движущихся предметов, фиксируют дискретно датчиком изменение координат предмета, каждую последующую и предыдущую строки запоминают и воспроизводят по очередному сигналу датчика, а кадровая развертка запускается по сигналу адреса последней строки.
