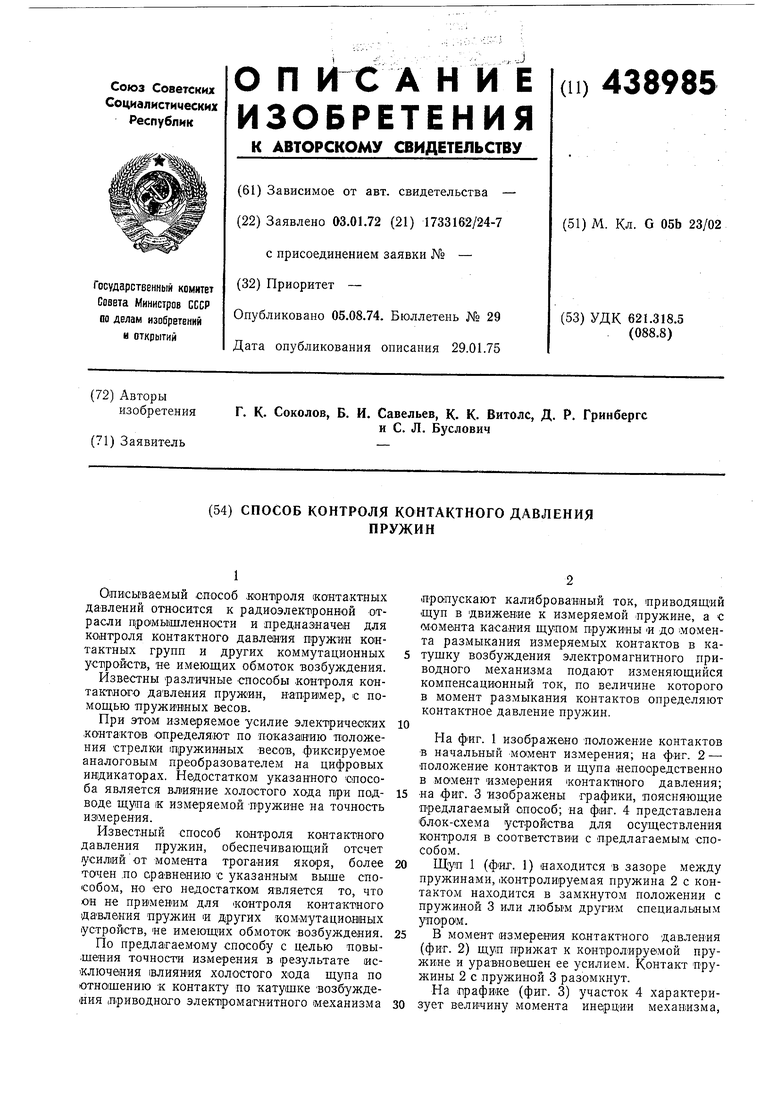
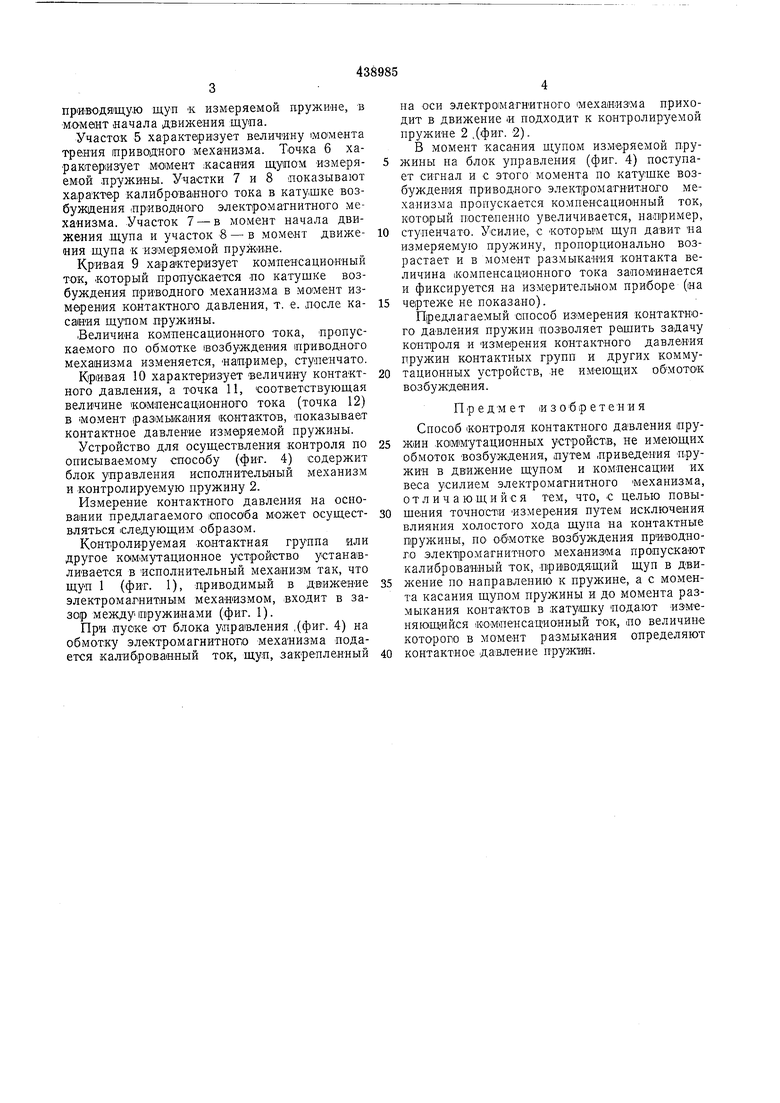
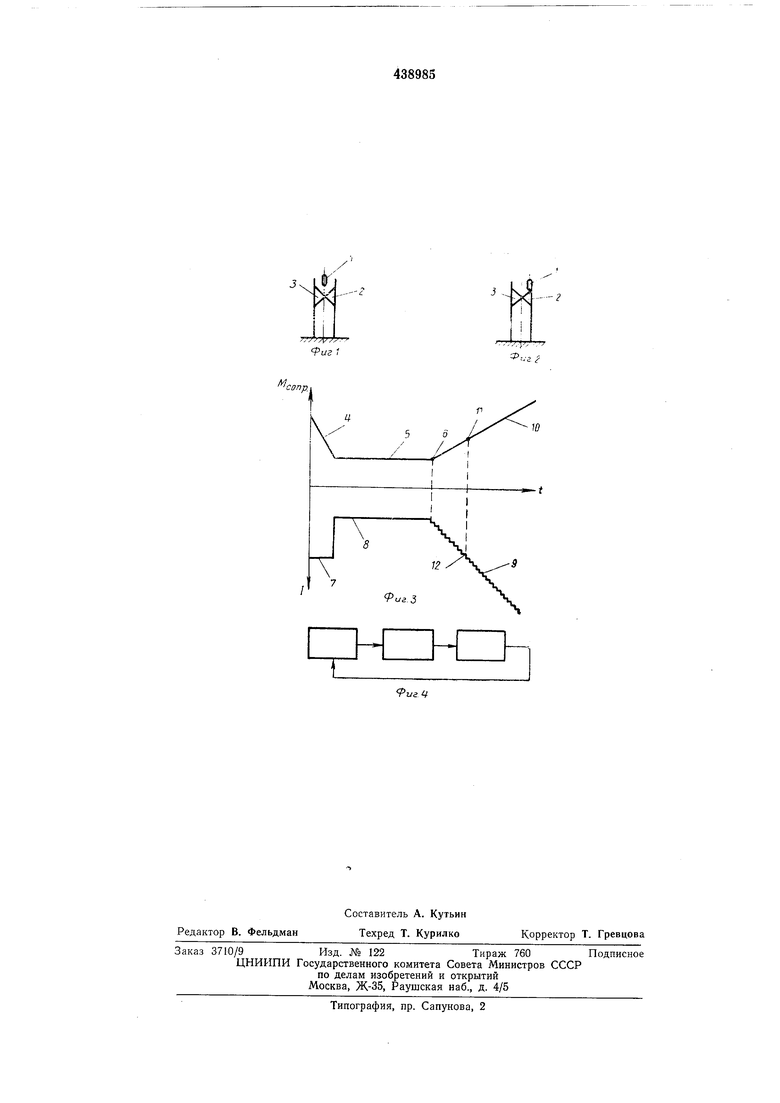
Описываемый способ .контроля контактных давлений относится к радиоэлектронной отрасли проинышленности и предназиачен для контроля контактного давления пружИн коитактных групп и других коммутационных устройств, не имеющих обмоток возбуждения. Известны различные способы контроля контактлого давления пружин, например, с помощью ттружииных весов. При этом измеряемое усилие электрических .контактов определяют по показанию положения стрелк1И шружинных -весов, фиксируемое аналоговым преобразователем на цифровых индикаторах. Недостатком указанного способа явля-ется влияние холостого хода при подводе щупа к измеряемой -пружине на точность измерения. Известный способ контроля контактно1го давления пружин, обеспечивающий отсчет усилий от момента трогания якоря, более точен .по сравнению с указанным выше способом, но его недостатком является то, что он не прИ1меним для контроля контактного давления пружин и других ком-мутационных |устройств, не имеющих обмоток -возбуждения. По предлагаемому способу с целью повы.шения точности измерения в результате исключения ВЛИЯНИЯ холо-стого хода щупа по отношению -к контакту по катушке возбуждения .приводного электромагнитного механизма пропускают калиброванный ток, приводящий щуп в движение к измеряемой пружине, а с (момента касания щупом пружины и до момента размыкания измеряемых контактов в катушку возбуждения электромагнитного приводного механизма подают изменяющийся компенсационный ток, по величине которого в момент размыкания контактов определяют контактное давление пружин. На фиг. 1 изображено -положение контактов в начальный момент измерения; на фиг. 2- положение контактов и щупа непосредственно в момент измерения контактного давления; на фиг. 3 изображены гра.фики, поясня-ющие предлагаемый способ; на фиг. 4 представлена блок-схема устройства для осуществления контроля в соответствии с .предлагаемым способом. Щуп 1 (фиг. 1) находится в зазоре между пружинами, (Контролируемая пружина 2 с контактом находится в замкнутом положении с пружиной 3 или любым другим специальным упором. В момент измере.ния ко.нтактного давления (фиг. 2) щуп прижат к контролируемой пружине и уравновешен ее усилием. Контакт пружины 2 с пружиной 3 разомкнут. На 1Лрафике (фиг. 3) участок 4 характеризует величину момента инерции механизма.
приводящую щуп К измеряемой пружиие, в момент начала движения здуоа.
Участок 5 характеризует величину 1мо мента трения ириводного механизма. Точ.ка 6 характеризует момент ;касания щупом измеряем-ой пружиНы. Участки 7 и 8 показывают характер калиброванного тока в катушке возбуждения лриводного электрОМатнитното механизма. Участок 7 - в момент начала движения щупа и участок 8 - в момент движе«ия щупа к измеряемой пружине.
Кривая 9 характеризует компенсацио«ный ток, который пропускается по катущке возбуждения приводного механизма в момент измерения контактного давления, т. е. лосле касания щупом пружины.
.Величина компенсационного тока, пропускаемого по обмотке возбуждения трнводното механизма изменяется, например, ступенчато.
Кривая 10 характеризует величину контактного давления, а точка 11, соответствующая вели1чине кампенсационного тока (точка 12) в момент размыкания контактов, показывает контактное давление измеряемой пружины.
Устройство для осуществления контроля по описываемому способу (фиг. 4) содержит блок управления исполнителыный механизм и контролируемую пружину 2.
Измерение контактного давления на основании предлагаемого ianoco6a может осуществляться следующим образом.
Контролируемая контактная группа или другое коммутационное устройство устанавливается в исполнительный механизм так, что щуп 1 (фиг. 1), приводимый в движение электромагнитным механизмом, входит в зазор между пружин а ми (фиг. 1).
При пуске от блока управления ,(фиг. 4) на обмотку электромагнитнопо механизма подается калиброванный ток, щуп, закрепленный
на оси элсктромагнитного механизма приходит в движение и подходит к контролируемой пружине 2 Хфиг. 2).
В момент касания щупом измеряемой пружины на блок управления (фиг. 4) поступает сигнал и с этого момента по катушке возбуждения приводного электромагнитного механизма пропускается компенсационный ток, который постепенно увеличивается, например, ступенчато. Усилие, с которым щуп давит на измеряемую пружину, пропорционально возрастает и в момент размыкания контакта величина компенсационного тока запоминается и фиксируется на измерительном приборе (на чертеже не показано).
Предлагаемый способ из мерения контактного давления пружин позволяет ращить задачу конт1роля и измерения контактного давления пружин контактных групп и других коммутационных устройств, не имеющих обмоток возбуждения.
Предмет изобретения
Способ контроля контактного давления пружин ко1М1мутадионных устройств, не имеющих обмоток возбуждения, путем приведения пружин в движение щупом и компенсации их веса усилием электромагнитного механизма, отличающийся тем, что, с целью повыщения точности измерения путем исключения влияния холостого хода щупа на контактные пружины, по Обмотке возбуждения приводного электромагнитного механизма пропускают калиброванный ток, приводящий щуп в движение по направлению к пружине, а с момента касания щупом пружины и до момента размыкания контактов в катушку подают изменяющийся комяенсационный ток, по величине которого в момент размыкания определяют контактное давление пружин.
Фиг
м,
олр.
Y ФГУ,.