Изобретение относится к контрольно- измерительной технике и может быть использовано для отдельного измерения механической характеристики электромагнитного коммутационного аппарата (ЭМКА), механической характеристики возвратной пружины и тяговой характеристики магнитной системы.
Цель изобретения - расширение эксплуатационных свойств за счет обеспечения возможности снятия тяговой характеристики л повышение точности измерения.
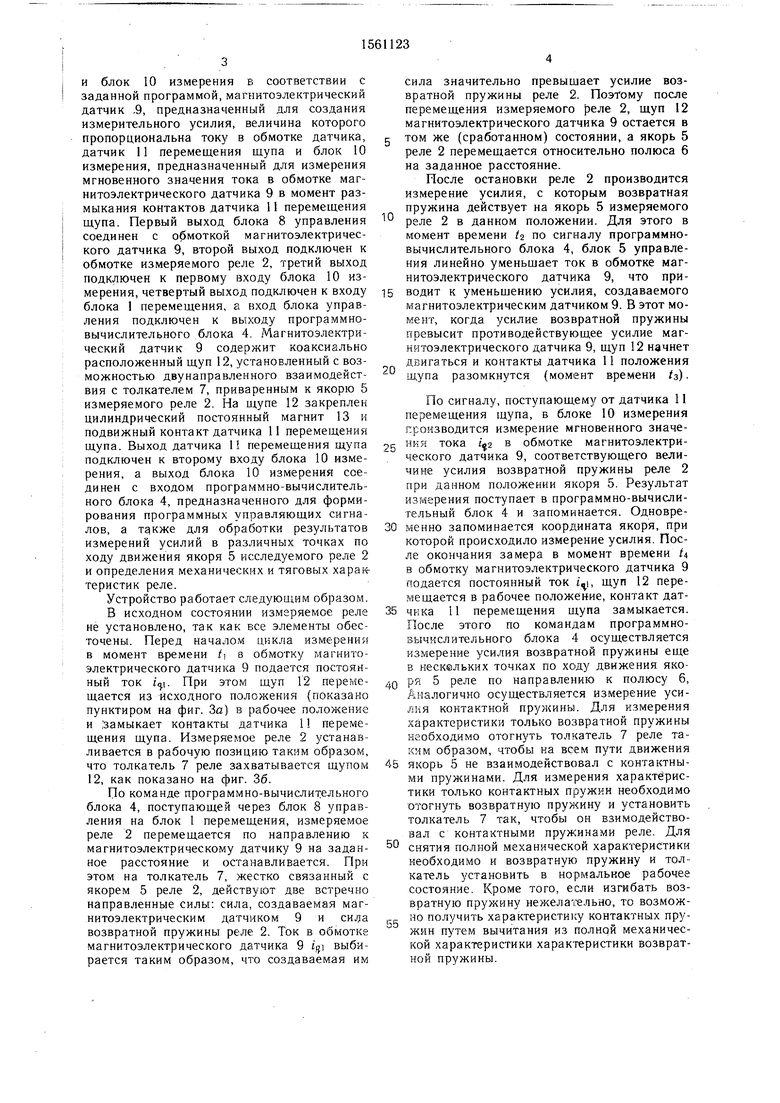
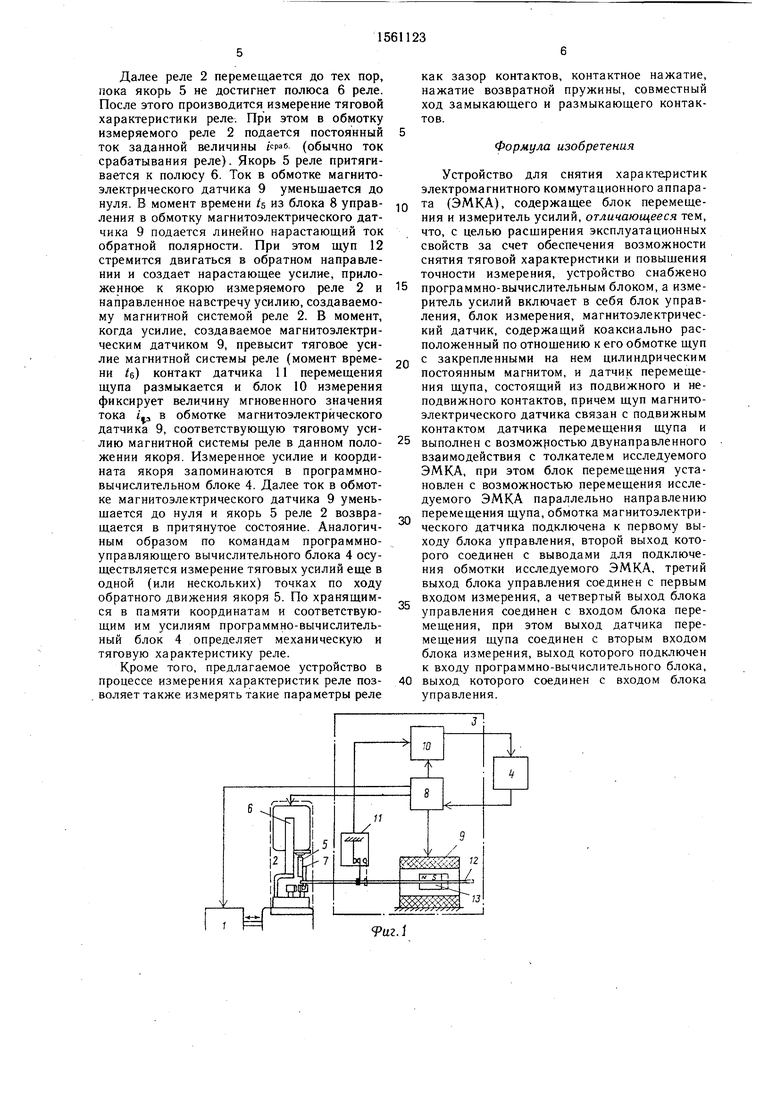
На фиг. 1 показан блок-схема предлагаемого устройства; на фиг. 2 - схема взаимосвязи толкателя реле и щупа магнитоэлектрического датчика; на фиг. 3 а, б и в - временная диаграмма тока ц в обмотке магнитоэлектрического датчика; временная
Диаграмма тока в обмотке измеряемого реле; временная диаграмма состояния датчика положения щупа UKWti
Устройство содержит блок 1 перемещения, кинематически связанный с измеряемым реле 2, измеритель 3 усилий и программно-вычислительный блок 4. Измеряемое реле 2 содержит подвижную часть, состоящую из якоря 5, перемещающегося при срабатывании реле к неподвижному полюсу 6 и приваренного к якорю толкателя 7.
Измеритель 3 усилий содержит блок 5 управления, предназначенный для подачи сигналов заданной формы в обмотки измеряемого реле 2 и магнитоэлектрического датчика 9, а также для подачи управляющих сигналов на блок 1 перемещения
сд
О
ю
ее
и блок 10 измерения в соответствии с заданной программой, магнитоэлектрический датчик ,9, предназначенный для создания измерительного усилия, величина которого пропорциональна току в обмотке датчика, датчик 11 перемещения щупа и блок 10 измерения, предназначенный для измерения мгновенного значения тока в обмотке магнитоэлектрического датчика 9 в момент размыкания контактов датчика 11 перемещения щупа. Первый выход блока 8 управления соединен с обмоткой магнитоэлектрического датчика 9, второй выход подключен к обмотке измеряемого реле 2, третий выход подключен к первому входу блока 10 измерения, четвертый выход подключен к входу блока 1 перемещения, а вход блока управления подключен к выходу программно- вычислительного блока 4. Магнитоэлектрический датчик 9 содержит коаксиально расположенный щуп 12, установленный с возможностью двунаправленного взаимодействия с толкателем 7, приваренным к якорю 5 измеряемого реле 2. На щупе 12 закреплен цилиндрический постоянный магнит 13 и подвижный контакт датчика 11 перемещения щупа. Выход датчика 1 перемещения щупа подключен к второму входу блока 10 измерения, а выход блока 10 измерения соединен с входом программно-вычислительного блока 4, предназначенного для формирования программных управляющих сигналов, а также для обработки результатов измерений усилий в различных точках по ходу движения якоря 5 исследуемого реле 2 и определения механических и тяговых xapast теристик реле.
Устройство работает следующим образом.
В исходном состоянии измеряемое реле не установлено, так как все элементы обесточены. Перед началом цикла измерения в момент времени ( в обмотку магнитоэлектрического датчика 9 подается постоянный ток . При этом щуп 12 перемещается из исходного положения (показано пунктиром на фиг. За) в рабочее положение и замыкает контакты датчика 11 перемещения щупа. Измеряемое реле 2 устанавливается в рабочую позицию таким образом, что толкатель 7 реле захватывается щупом 12, как показано на фиг. 36.
По команде программно-вычислительного блока 4, поступающей через блок 8 управления на блок 1 перемещения, измеряемое реле 2 перемещается по направлению к магнитоэлектрическому датчику 9 на заданное расстояние и останавливается. При этом на толкатель 7, жестко связанный с якорем 5 реле 2, действуют две встречно направленные силы: сила, создаваемая магнитоэлектрическим датчиком 9 и сила возвратной пружины реле 2. Ток в обмотке магнитоэлектрического датчика 9 i выбирается таким образом, что создаваемая им
0
0
5
5
0
5
0
5
сила значительно превышает усилие возвратной пружины реле 2. Поэтому после перемещения измеряемого реле 2, щуп 12 магнитоэлектрического датчика 9 остается в том же (сработанном) состоянии, а якорь 5 реле 2 перемещается относительно полюса б на заданное расстояние.
После остановки реле 2 производится измерение усилия, с которым возвратная пружина действует на якорь 5 измеряемого реле 2 в данном положении. Для этого в момент времени t по сигналу программно- вычислительного блока 4, блок 5 управления линейно уменьшает ток в обмотке магнитоэлектрического датчика 9, что приводит к уменьшению усилия, создаваемого магнитоэлектрическим датчиком 9. В этот момент, когда усилие возвратной пружины превысит противодействующее усилие магнитоэлектрического датчика 9, щуп 12 начнет двигаться и контакты датчика 11 положения щупа разомкнутся (момент времени /з)
По сигналу, поступающему от датчика 11 перемещения щупа, в блоке 10 измерения производится измерение мгновенного значения тока ig2 в обмотке магнитоэлектрического датчика 9, соответствующего величине усилия возвратной пружины реле 2 при данном положении якоря 5. Результат измерения поступает в программно-вычислительный блок 4 и запоминается. Одновременно запоминается координата якоря, при которой происходило измерение усилия. После окончания замера в момент времени /4 в обмотку магнитоэлектрического датчика 9 подается постоянный ток i, щуп 12 перемещается в рабочее положение, контакт датчика 11 перемещения щупа замыкается. После этого по командам программно- вычислительного блока 4 осуществляется измерение усилия возвратной пружины еще в несквльких точках по ходу движения якоря 5 реле по направлению к полюсу 6, Аналогично осуществляется измерение усилия контактной пружины. Для измерения характеристики только возвратной пружины необходимо отогнуть толкатель 7 реле таким образом, чтобы на всем пути движения якорь 5 не взаимодействовал с контактными пружинами. Для измерения характеристики только контактных пружин необходимо отогнуть возвратную пружину и установить толкатель 7 так, чтобы он взимодейство- вал с контактными пружинами реле. Для снятия полной механической характеристики необходимо и возвратную пружину и толкатель установить в нормальное рабочее состояние. Кроме того, если изгибать возвратную пружину нежелательно, то возможно получить характеристику контактных пружин путем вычитания из полной механической характеристики характеристики возвратной пружины.
Далее реле 2 перемещается до тех пор, пока якорь 5 не достигнет полюса 6 реле. После этого производится измерение тяговой характеристики реле. При этом в обмотку измеряемого реле 2 подается постоянный ток заданной величины краб (обычно ток срабатывания реле). Якорь 5 реле притягивается к полюсу 6. Ток в обмотке магнитоэлектрического датчика 9 уменьшается до нуля. В момент времени /5 из блока 8 управления в обмотку магнитоэлектрического датчика 9 подается линейно нарастающий ток обратной полярности. При этом щуп 12 стремится двигаться в обратном направлении и создает нарастающее усилие, приложенное к якорю измеряемого реле 2 и направленное навстречу усилию, создаваемому магнитной системой реле 2. В момент, когда усилие, создаваемое магнитоэлектрическим датчиком 9, превысит тяговое усилие магнитной системы реле (момент времени t&) контакт датчика 11 перемещения щупа размыкается и блок 10 измерения фиксирует величину мгновенного значения тока г., в обмотке магнитоэлектрического датчика 9, соответствующую тяговому усилию магнитной системы реле в данном положении якоря. Измеренное усилие и координата якоря запоминаются в программно- вычислительном блоке 4. Далее ток в обмотке магнитоэлектрического датчика 9 уменьшается до нуля и якорь 5 реле 2 возвращается в притянутое состояние. Аналогичным образом по командам программно- управляющего вычислительного блока 4 осуществляется измерение тяговых усилий еще в одной (или нескольких) точках по ходу обратного движения якоря 5. По хранящимся в памяти координатам и соответствующим им усилиям программно-вычислительный блок 4 определяет механическую и тяговую характеристику реле.
Кроме того, предлагаемое устройство в процессе измерения характеристик реле позволяет также измерять такие параметры реле
0
как зазор контактов, контактное нажатие, нажатие возвратной пружины, совместный ход замыкающего и размыкающего контактов.
Формула изобретения
Устройство для снятия характеристик электромагнитного коммутационного аппарата (ЭМКА), содержащее блок перемещения и измеритель усилий, отличающееся тем, что, с целью расширения эксплуатационных свойств за счет обеспечения возможности снятия тяговой характеристики и повышения точности измерения, устройство снабжено
программно-вычислительным блоком, а измеритель усилий включает в себя блок управления, блок измерения, магнитоэлектрический датчик, содержащий коаксиально расположенный по отношению к его обмотке щуп с закрепленными на нем цилиндрическим постоянным магнитом, и датчик перемещения щупа, состоящий из подвижного и неподвижного контактов, причем щуп магнитоэлектрического датчика связан с подвижным контактом датчика перемещения щупа и
5 выполнен с возможностью двунаправленного взаимодействия с толкателем исследуемого ЭМКА, при этом блок перемещения установлен с возможностью перемещения исследуемого ЭМКА параллельно направлению перемещения щупа, обмотка магнитоэлектрического датчика подключена к первому выходу блока управления, второй выход которого соединен с выводами для подключения обмотки исследуемого ЭМКА, третий выход блока управления соединен с первым входом измерения, а четвертый выход блока управления соединен с входом блока перемещения, при этом выход датчика перемещения щупа соединен с вторым входом блока измерения, выход которого подключен к входу программно-вычислительного блока,
0 выход которого соединен с входом блока управления.
0
5
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения нажатия возвратной пружины электромагнитного реле | 1987 |
|
SU1417059A1 |
| Устройство для измерения контактного нажатия электромагнитных реле | 1982 |
|
SU1129665A1 |
| Способ измерения контактного нажатия размыкающего контакта электромагнитного нейтрального реле | 1990 |
|
SU1781725A1 |
| Способ контроля усилия нажатия возвратной пружины электромагнитного коммутационного аппарата | 1989 |
|
SU1709416A1 |
| Способ определения зазора переключающей контактной группы электромагнитного реле | 1989 |
|
SU1631621A1 |
| Устройство для контроля раствора и провала контактов электромагнитного коммутационного аппарата | 1988 |
|
SU1576924A1 |
| Способ измерения контактного зазора переключающей контактной группы | 1983 |
|
SU1103202A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ КЛАПАНОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2022 |
|
RU2795208C1 |
| Устройство для снятия временных динамических характеристик | 1978 |
|
SU941938A1 |
| Способ регулировки электромагнитного реле | 1986 |
|
SU1430996A1 |
Изобретение относится к контрольно-измерительной технике и может быть использовано для отдельного измерения механической характеристики электромагнитного коммутационного аппарата, механической характеристики возвратной пружины и тяговой характеристики магнитной системы. Цель изобретения - расширение эксплуатационных свойств за счет обеспечения возможности снятия тяговой характеристики и повышение точности измерения. Устройство содержит блок перемещения, кинематически связанный с измеряемым реле, и измеритель усилий, выполненный с возможностью взаимодействия с подвижной частью электромагнитного реле. Новым является то, что измеритель усилий содержит магнитоэлектрический датчик, датчик перемещения щупа, блок управления и блок измерения, а устройство снабжено программно-вычислительным блоком. Магнитоэлектрический датчик в сочетании с датчиком перемещения щупа, блоком управления и блоком измерения позволяет измерять с высокой точностью усилия порядка десятых долей грамма. Программно-вычислительный блок по координатам заданных точек на пути перемещения якоря реле и измеренным усилием в этих точках определяет механическую и тяговую характеристику реле. Изобретение позволяет измерять характеристики микроминиатюрных электромагнитных реле, работающих при малых (порядка 1 г) усилиях, воздействующих на якорь реле. 3 ил.
фиг.. 2
to6M | t cpae.
U$nut A замкнут разопк-ндт
7 П
Фив. 3
| Витенберг М | |||
| И | |||
| Расчет электромагнитных реле для аппаратуры автоматики и связи | |||
| М.-Л.: Энергия, 1966 | |||
| Устройство для снятия статической противодействующей характеристики электрического аппарата | 1978 |
|
SU742880A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
