(54) УСТРОЙСТВО ДЖ ИЗМЕРЕНИЯ МАГНИТНОГО ПОЛЯ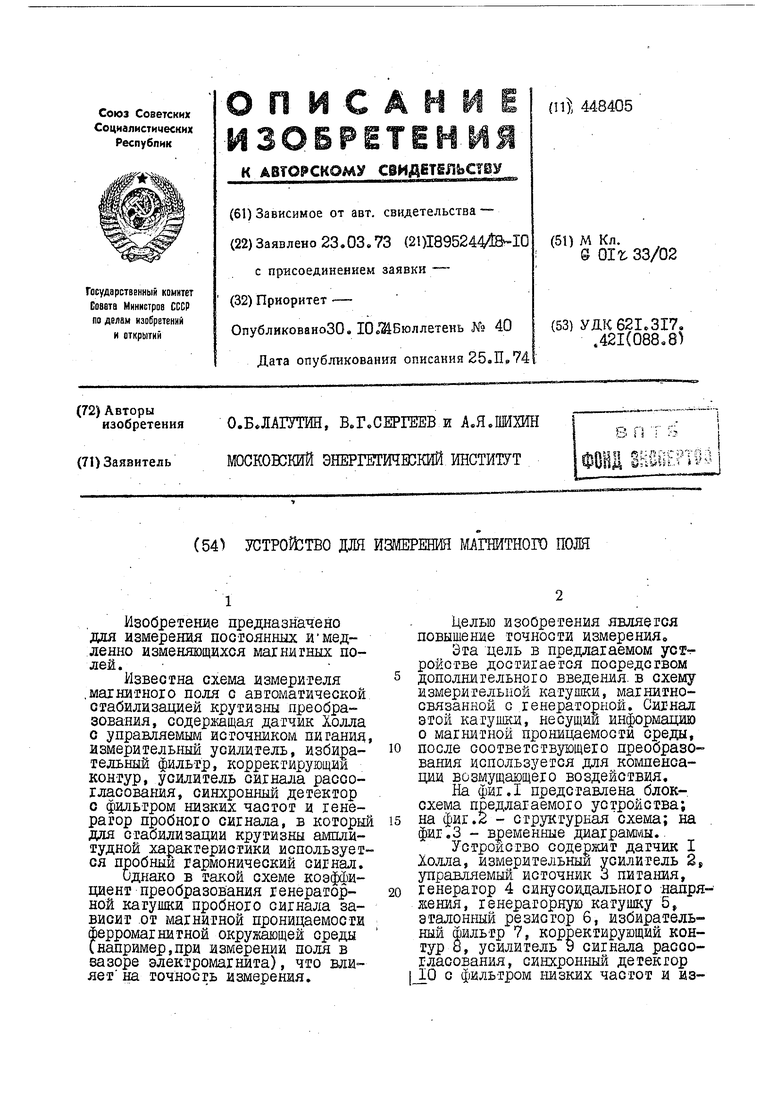

Изобретение предназначено для измерения постоянных имедленно изменяющихся магнитных полей.
Известна схема измерителя .магнитною поля с автоматической стабилизацией крутизны преобразования, содержащая датчик Холла с управляемым источником пиганид измерительный усилитель, избирательный фильтр, корректирующий контур, усилитель сигнала рассогласования, синхронный детектор о фильтром низких частот и генератор пробного сигнала, в который для стабилизации крутизны амплитудной ха;рактеристики используется пробный гармонический сигнал.
Однако в такой схеме коэффициент преобразования генераторной катушки пробного сигнала зависит .от магнитной проницаемости ферромагнитной окружающей среды Снапример,при измерении поля в вазоре электромагнита), что влияет на точность измерения.
Целью изобретения является повышение точности измерения,
Эта цель в предлагаемом усттройс-гве достигается посредством дополнительного введения, в схему измерительной катушки, магнитносвязанной с генераторной. Сигнал этой катушки, несущий информацию о магнитной проницаемости среды, после соответствующего преобразования используется для компенсации возмущающею воздействия.
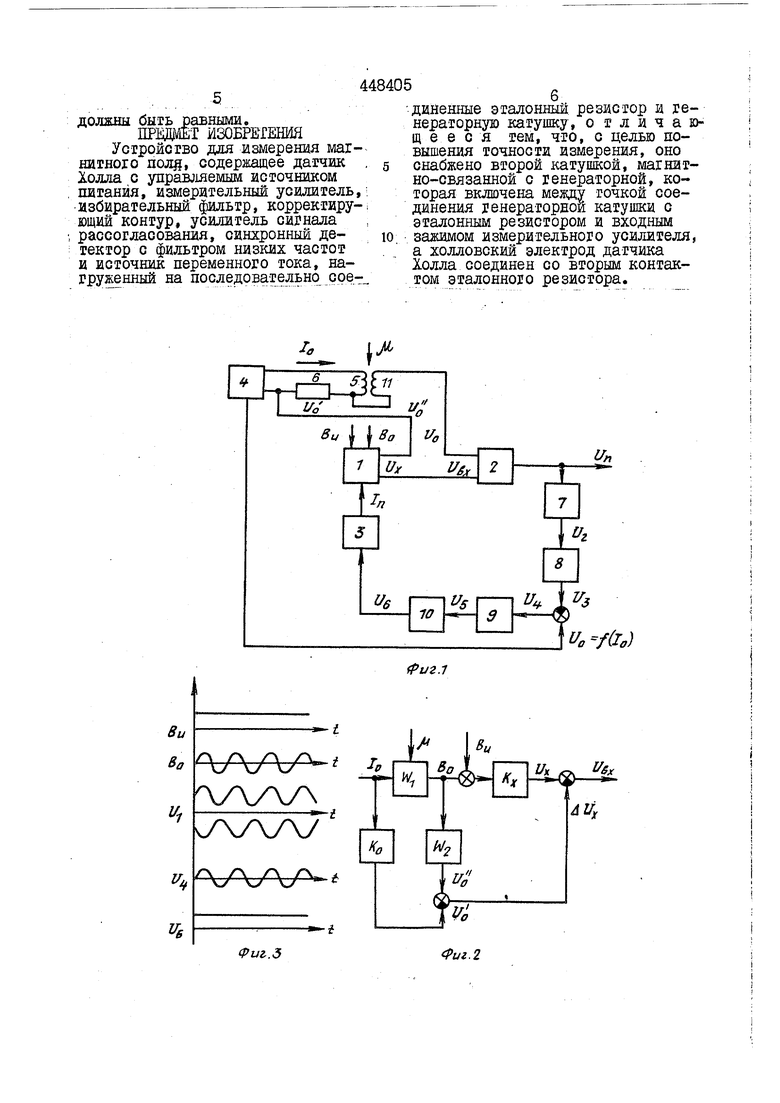
На фиг.1 представлена блоксхема предлагаемою устройства; на фиг. - структурная схема; на фиг.З временные диаграммы..
Устройство содержит датчик I Холла, измерительный усилитель 2, управляемый источник 3 питания, генератор 4 синусоидальною напряжения, генераторную катушку 5, эталонный резистор 6, избирательный фильтр 7, корректирующий контур о. усилитель 9 сигнала рассогласования, синхронный детектор I 10 с фильтром 1-шзких частот и измерительную кагушку II. На дагчик Холла воздействуют совместно измеряемое поле Зу и поле BO пробного сигнала, созда.ваемое генератором пробного сигна ла, состоящим из генератора 4 синусоидального напряжения и генера торной катушки 5, включенной последовательно с эталонным резистором 6, Частота пробного сигнала выбирается достаточно высокой (несколько сотен герц). Поскольку измеряемое поле является постоянным или медленно изменяющимся :сигналом, то спектры пробного и измеряемого полей различны. Датчик .Холла питается от управляемого источника 3 постоянного тока. Составляющая выходного сигнала Ц измерительного усилителя, пропорциональная изглеряемому полю 6ц,,измеряется регистрирующим прибором, а напряжение VQ, пропорциональное полю б о пробного сигнала, выделяется избиратель-, ншй фильтром 7, настроенным на частоту пробного сигнала, С целью обеспечения требуемых динамических свойств системы, в схему введен пассивный корректирующий контур 8, выходной сигнал t/3 которою сравнивается с напряжением и о . пропорциональны ; току возбуждения генераторной катушки. Возшжшощий в результате сравнения сигнал рассогласования lA-Uj-Ui после усиления усилителем У и детектирования синхронным детектором 10, управляемым от генератора пробного сигнала, поступает в виде напряжеш1я Ь/б на вход управляемого источника 3 тока. Стабилизация амплитудной характеристики преобразования осуществляется путем автоматической подстройки величины тока In питания датчика Холла пропорционально отклонению коэ114ициента преобразования измерительного тракта от заданного значения. Для коштенсации возмущающего воздействия, обусловленного влия.,,... нием ферромагнитной окружающей среды, в схему введена измерител ная катушка, магнитно-связанная с генераторной, образующая с последней воздушныйтрансформатор. Конструктивно воздушный трансформатор выполнен в виде цилиндрической катушки, равномерно намотанной на каркас двойным проводом Б среднем.сечении которой расположен датчж Холла, Эти элементы являются составной частью измерительного зонда. Сигнал (Jo измерительной катушки, связанный с током Г гене-; раторной катушки и возмущением : выражением |1 .,,. ciOiiGi аЛо i где, - относительная магнитная проницаемость среды; Jio - магнитная постоянная; 5, - соответственно площадь сечения и длина катушки; ti/jU/g- число витков соответственно генераторной и измерительной катушек сравнивается с напряжением UQ , пропорциональным току возбуждения генераторной катушки. Выделенный при этом сигнал рассогласования Л {/о (; - V втитается из выходного напряжения (/X датчика Холла, также содержащего составляюш1ую КуЬг, , пропорциональную . .Настройка схеглы состоит в выравнивании напряжений Ul и U(, при отсутствии Ферромагнитной среды ), осуществляемая регулировкой резистора 6. Тогда при наличии ферромагнитной среды ), составляющая входного сигнала из- мерительного усилителя, пропорциональная возмущающему воздействию, будет практически равна нулю. Для определения условий компенсации возмущения рассмотрим структурную схему, приведенную на фиг.З, где , /(o,/{v- передаточные функции и коэдациенты преобразования обозначенных на схеме координат систеглы. Остальные обозначения прежние. Сигнал, действующий на входе измерительного усилителя будет раьГ ( , л} io )Io , ,Ао1о С 1о Ле ( vV,(;f;J-vi/2}. откуда следует, что для достижения абсолютной инвариантности (независимости.) координаты-(/ от возмущени .Д- необходимо и доста1-очно, чтобы передаточная функция бы.te тождественно равна нулю, т.е. U 0. Тогда условие компенсации будет вьшолнимо , т.е. оэффициенты преобразования измеительной катушки и датчика Холла
должны быгь равными,
ПРШЕТ ИЗОБРЕГЕНИЯ Уогройсгво для измерения магнигного ПОЛИ, содержащее дагчик Холла с управляемым источником шагания, измерительный усилитель, избирательный фильтр, корректирующий контур, усилитель сигнала рассогласования, синхронный детектор с фильтром низких частот и источник переменного тока, нагруженный на последовательно сре J
дийенные эталоншш резистор и генераторную катушку, отличающ ее с я тем, что, с целью повышения точности измерения, оно снабжено второй катушкой, магшатно-связанной с генераторной, которая включена мелщу точкой соединения генераторной катушки с эталонным резистором и входным
зажимом измерительного усилителя, а холловский электрод датчика Холла соединен со вторым контактом эталонного резистора.
ffu2.1
