1
Изобретение относится к преобразователям одного вида движения в другой.
Известен механизм преобразования вращательного движения в возвратно-поступательное движение, содержащий ведущий вал, жестко соединенный с внутренним звеном, взаимодействующий с соосным ему внешним звеном посредством роликов, размещенных в винтовых канавках правого и левого направления, переходящих одна в другую и расположенных на поверхности внешнего или внутреннего звена, и корпуса с направляющими, в которых установлено внешнее звено с возможностью поступательного движения.
Предложенный механизм отличается от известных тем, что винтовые канавки выполнены па внутренней поверхности внешнего звена, а внутреннее звено снабжено жестко закрепленными в нем пальцами, оси которых параллельны оси внутреннего звена и расположены на соосной внутреннему звену окружности, а число пальцев равно числу роликов, шарнирно установленных на пальцах с возможностью качания на радиально расположенной оси.
Кроме того, пальцы установлены на внутреннем звене с возможностью перемещения в радиальном направлении с помощью промежуточного элемента, например эксцентриковой втулки.
Такое выполнение механизма позволяет повысить нагрузочную способность и уменьшить габариты механизма, а также унростить его обслуживание.
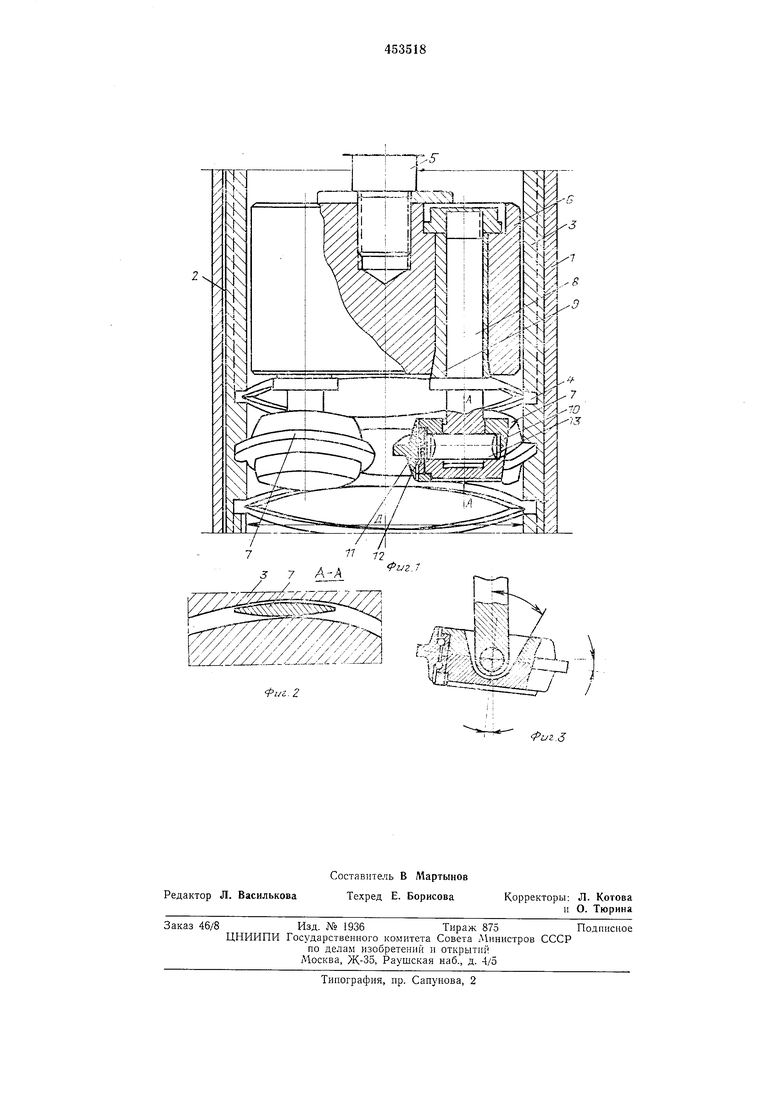
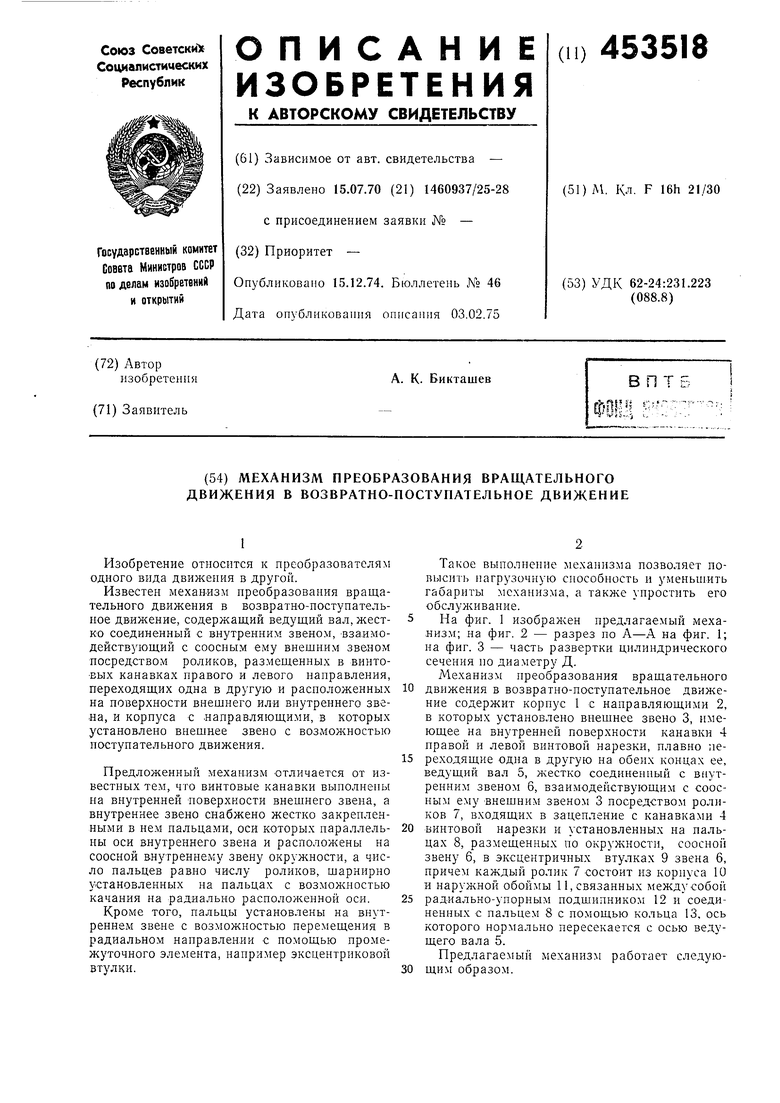
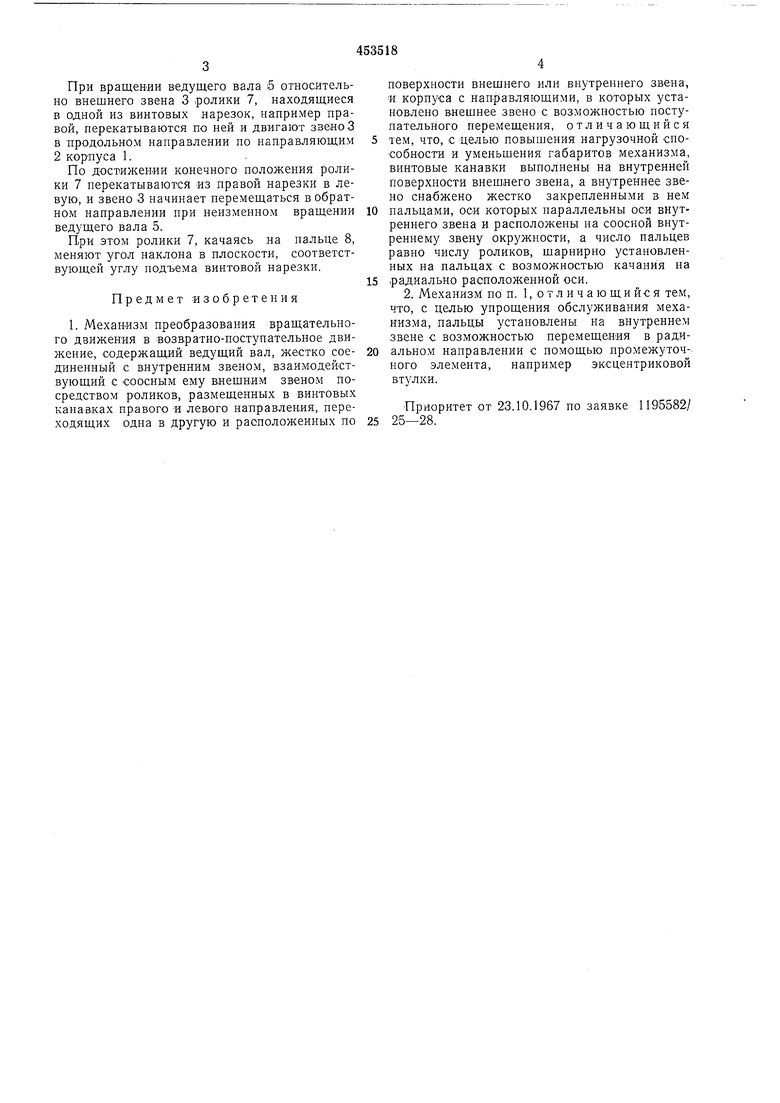
На фиг. 1 изображен предлагаемый механизм; па фиг. 2 - разрез по А-А на фиг. 1; на фиг. 3 - часть развертки цилиндрического сечения по диаметру Д. Механизм нреобразования вращательного
движения в возвратно-поступательное движение содержит корпус 1 с направляющими 2, в которых установлено внешнее звено 3, имеющее на внутренней поверхности канавки 4 правой и левой винтовой нарезки, плавно ;ieреходящие одна в другую на обеих концах ее, ведущий вал 5, жестко соединенный с внутренним звеном 6, взаимодействующим с соосным ему Внешним звеном 3 посредством роликов 7, входящих в зацепление с канавками 4
винтовой нарезки и установленных на пальцах 8, размещенных по окружности, соосной звену 6, в эксцентричных втулках 9 звена 6, причем каждый ролик 7 состоит из корпуса 10 и наружной обоймы 11, связанных между собой
радиально-упорным подшипником 12 и соединенных с пальцем 8 с помощью кольца 13, ось которого нормально пересекается с осью ведущего вала 5. Предлагаемый механизм работает следующим образом.
При вращении ведущего вала б относительно внещнего звена 3 ролики 7, находящиеся в одной из БИНТОВЫХ .нарезок, например правой, перекатываются по ней и двигают звено 3 в продольном направлении по направляющим 2 корпуса 1.
По достижении конечного положения ролики 7 перекатываются из правой нарезки в левую, и звено 3 начинает перемещаться в обратном направлении при неизменном вращении ведущего вала 5.
При этом ролики 7, качаясь на пальце 8, меняют угол наклона в плоскости, соответствующей углу подъема винтовой нарезки.
Предмет изобретения
1. Механизм преобразования вращательного движения в возвратно-поступательное движение, содержащий ведущий вал, жестко соединенный с внутренним звеном, взаимодействующий с ооосным ему внещним звеном посредством роликов, размещенных в винтовых канавках правого и левого направления, переходящих одна в другую и расположенных по
поверхности внещнего или внутреннего звена, и корпуса с направляющими, в которых установлено внещнее звено с возможностью поступательного перемещения, отличающийся тем, что, с целью повышения нагрузочной способности и уменьщения габаритов механизма, винтовые канавки выполнены на внутренней поверхности внещнего звена, а внутреннее звено снабжено жестко закрепленными в нем
пальцами, оси которых параллельны оси внутреннего звена и расположены на соосной внутреннему звену окружности, а число пальцев равно числу роликов, щарнирно установленных на пальцах с возможностью качания на
радиально расположенной оси.
2. Механизм по п. 1, о т л и ч а ю щ и и с я тем, что, с целью упрощения обслуживания механизма, пальцы установлены на внутреннем звене с возможностью перемещения в радиальном направлении с помощью промежуточного элемента, например эксцентриковой втулки.
Приоритет от 23.10.1967 по заявке 1195582/ 25-28.
-Oi . - / / Л
; fl U,i45/ / 1
-. . , -
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм преобразования вращательного движения в возвратно-поступательное | 1989 |
|
SU1810680A1 |
| Поршневой насос | 2017 |
|
RU2643881C1 |
| Плунжерный агрегат | 2017 |
|
RU2654560C1 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ НА ОСНОВЕ ВОЛНОВОЙ ПЕРЕДАЧИ ПОСТУПАТЕЛЬНОГО ДЕЙСТВИЯ | 2003 |
|
RU2265146C2 |
| Передача для преобразования вращательного движения в возвратно-поступательное | 1958 |
|
SU121629A1 |
| ЗУБЧАТО-РАМОЧНЫЙ ПРЕОБРАЗОВАТЕЛЬ ДВИЖЕНИЯ | 2003 |
|
RU2266446C2 |
| РЕГУЛИРУЕМОЕ УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В КОЛЕБАТЕЛЬНОЕ | 2005 |
|
RU2307271C1 |
| ИНВАЛИДНАЯ КОЛЯСКА С ЭЛЕКТРОМЕХАНИЧЕСКИМ ПРИВОДОМ | 1991 |
|
RU2085166C1 |
| УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ВОЗВРАТНО-ПОСТУПАТЕЛЬНОЕ И НАОБОРОТ | 2010 |
|
RU2471099C2 |
| ПЛАНЕТАРНЫЙ МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ДВИЖЕНИЯ | 2007 |
|
RU2416747C2 |