Изобретение относится к машиностроению, а именно к устройствам для преобра- зования вращательного движения в возвратно-поступательное движение, и может быть использовано в приводах плунжерного скважинного насоса.
Целью изобретения является расширение кинематических возможностей, повышение плавности движения и нагрузочной способности.
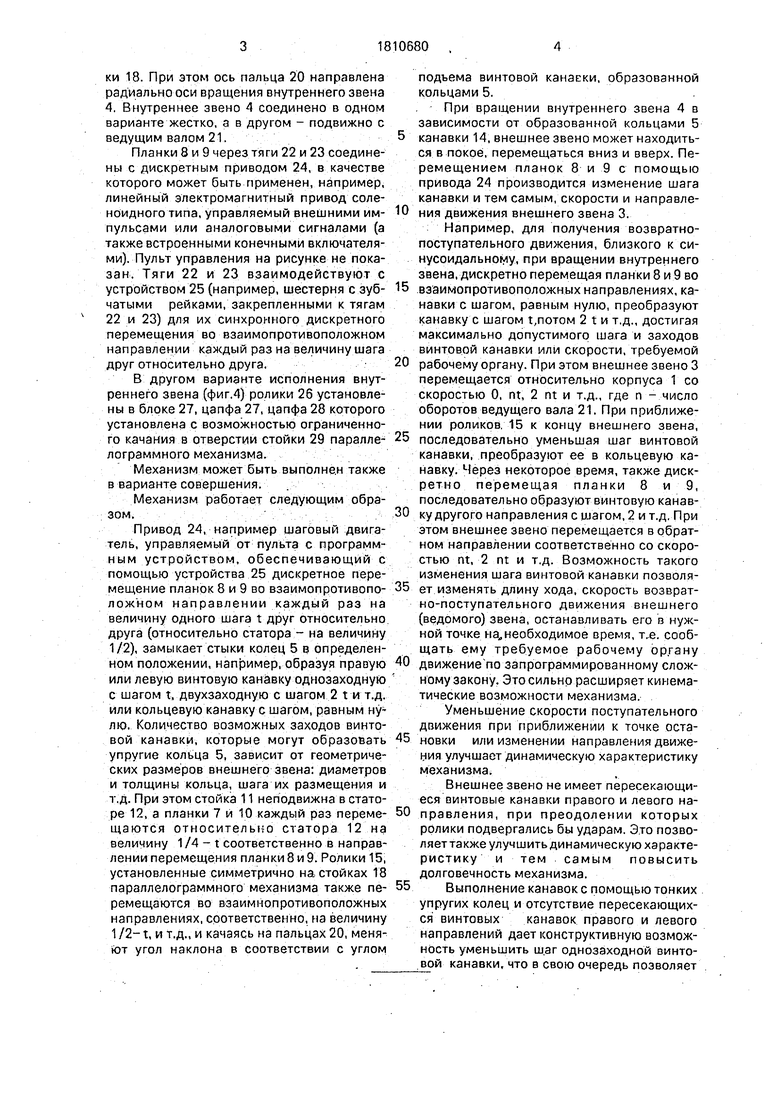
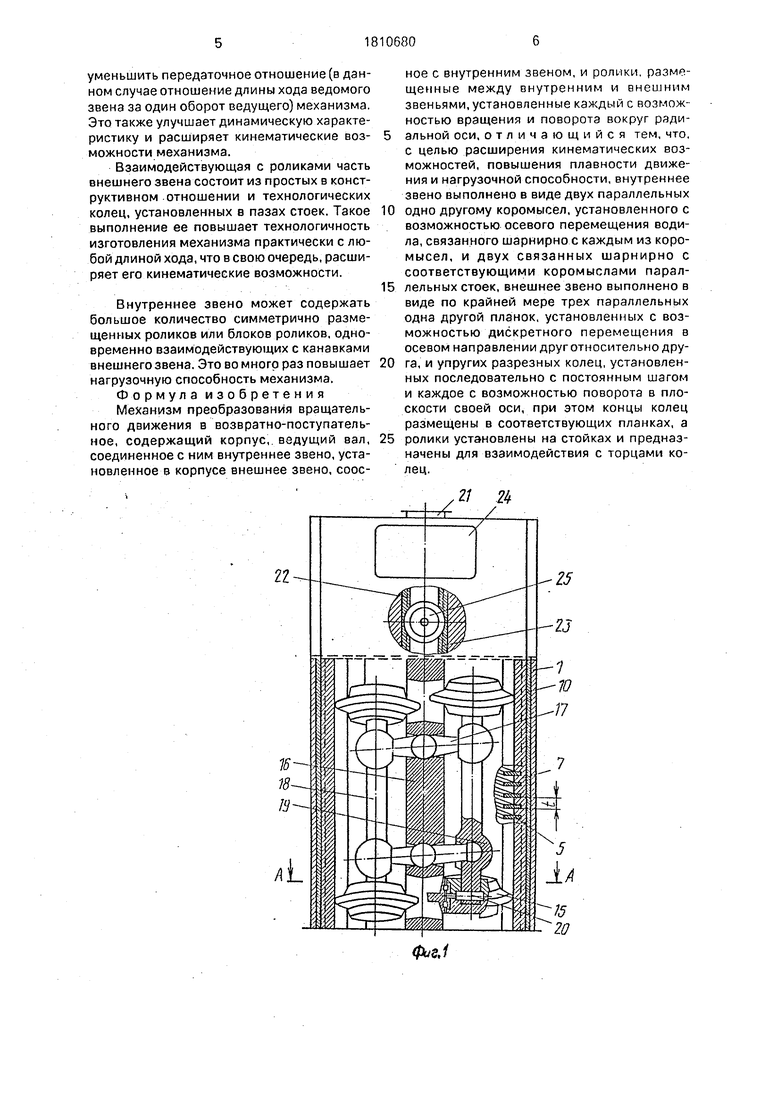
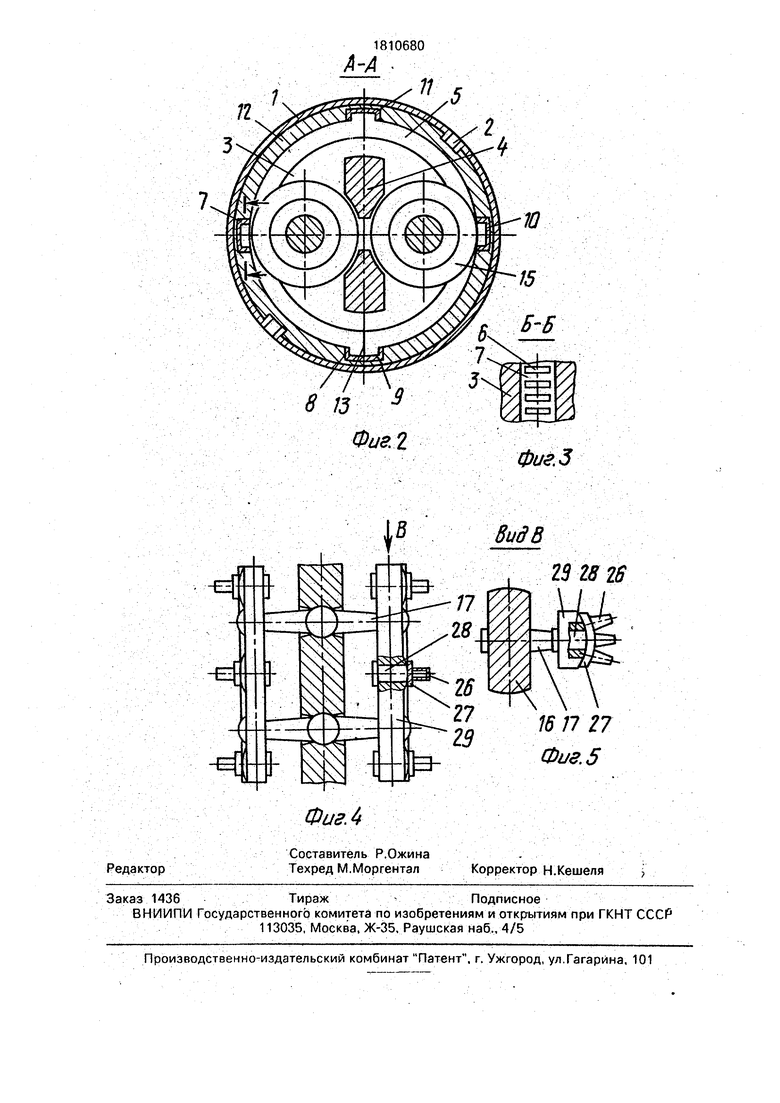
На фиг.1 изображен предлагаемый механизм; на фиг.2 - разрез А-А на фиг.1 при шаге винтовой канавки, равном нулю; на фиг.З - разрез Б-Б на фиг.2; на фиг.4 - параллелограммный механизм с блоком роликов; на фиг.5 - вид В на фиг.4.
Механизм преобразования вращательного движения в возвратно-поступательное
содержит корпус 1 с направляющими 2: в котором находится внешнее звено 3 и взаимодействующий с ним внутреннее звено 4. Внешнее звено 3 состоит из упругих колец 5, установленных с определенным шагом в пазах 6 планок 7, 8, 9, 10 и 11, статора 10. Кольца 5 имеют разрез 13 и стыки их установлены в пазах планки 8 и 9. С канавками 14 внешнего звена 3, образованными кольцами 5, взаимодействуют ролики 15 внутреннего звена 4. Внутреннее звено 4 состоит из водила 16, установленных на нем с возможностью качания в плоскости оси его вращения коромысел 17, стоек 18, соединенных с последними шарнирами и образующие вместе с ними параллелограммный механизм, и роликов 15, установленных с возможностью качания на пальцах 20 стой00
о о
00
о
ки 18. При этом ось пальца 20 направлена радиально оси вращения внутреннего звена 4. Внутреннее звено 4 соединено в одном варианте жестко, а в другом - подвижно с ведущим валом 21.
Планки 8 и 9 через тяги 22 и 23 соединены с дискретным приводом 24, в качестве которого может быть применен, например, линейный электромагнитный привод соленоидного типа, управляемый внешними импульсами или аналоговыми сигналами (а также встроенными конечными включателями). Пульт управления на рисунке не показан. Тяги 22 и 23 взаимодействуют с устройством 25 (например, шестерня с зубчатыми рейками/закрепленными к тягам 22 и 23) для их синхронного дискретного перемещения во взаимопротивоположном направлении каждый раз на величину шага друг относительно друга.
В другом варианте исполнения внутреннего звена (фиг.4) ролики 26 установлены в блоке 27, цапфа 27, цапфа 28 которого установлена с возможностью ограниченного качания в отверстии стойки 29 паралле- лограммного механизма.
Механизм может быть выполнен также в варианте совершения.
Механизм работает следующим обра; ЗОМ. . .: . : . :. ,
Привод 24, например шаговый двигатель, управляемый от пульта с программ- ным устройством, обеспечивающий с помощью устройства 25 дискретное перемещение планок 8 и 9 во взаимопротивоположном направлении каждый раз на величину одного шага t друг относительно, друга (относительно статора - на величину 1/2), замыкает стыки колец 5 в определенном положении, например, образуя правую или левую винтовую канавку однозаходную с шагом t, двухзаходную с шагом 2 t и т.д. или кольцевую канавку с шагом/равным нулю. Количество возможных заходов винтовой канавки, которые могут образовать упругие кольца 5, зависит от геометрических размеров внешнего звена: диаметров и толщины кольца, шага их размещения и т.д. При этом стойка 11 неподвижна в статоре 12, а планки 7 и 10 каждый раз перемещаются относительно статора 12 на величину 1/4-1 соответственно в направлении перемещения планки 8 и 9. Ролики 15, установленные симметрично настойках 18 параллелограммного механизма также перемещаются во взаимнопротивоположных направлениях, соответственно, на величину 1 /2-1, и т.д., и качаясь на пальцах 20, меняют угол наклона в соответствии с углом
подъема винтовой канаеки, образованной кольцами 5.
При вращении внутреннего звена 4 в зависимости от образованной кольцами 5
канавки 14, внешнее звено может находиться в покое, перемещаться вниз и вверх. Перемещением планок 8 и 9 с помощью привода 24 производится изменение шага канавки и тем самым/скорости и направления движения внешнего звена 3.
Например, для получения возвратно- поступательного движения, близкого к синусоидальному, при вращении внутреннего звена, дискретно перемещая планки 8 и 9 во
5 .взаимопротивоположных направлениях, канавки с шагом, равным нулю, преобразуют канавку с шагом флотом 2 t и т.д., достигая максимально допустимого шага и заходов винтовой канавки или скорости, требуемой
0 рабочему органу. При этом внешнее звено 3 перемещается относительно корпуса 1 со скоростью 0, т, 2 nt и т.д., где п - число оборотов ведущего вала 21, При приближении роликов. 15 к концу внешнего звена,
5 последовательно уменьшая шаг винтовой канавки, преобразуют ее в кольцевую канавку. Через некоторое время, также дискретно перемещая планки 8 и 9, последовательно образуют винтовую канав0 ку другого направления с шагом, 2 и т.д. При этом внешнее звено перемещается в обратном направлении соответственно со скоростью nt, 2 nt и т.д. Возможность такого изменения шага винтовой канавки позволя5 ет изменять длину хода, скорость возвратно-поступательного движения внешнего (ведомого) звена, останавливать его в нужной точке на„необходимое время, т.е. сообщать ему требуемое рабочему органу
0 движение по запрограммированному сложному закону. Это сильно расширяет кинематические возможности механизма.
Уменьшение скорости поступательного движения при приближении к точке оста5 новки или изменении направления движения улучшает динамическую характеристику механизма.
Внешнее звено не имеет пересекающиеся винтовые канавки правого и левого на0 правления, при преодолении которых ролики подвергались бы ударам. Это позво- ляеттакже улучшить динамическую характеристику и тем самым повысить долговечность механизма.
5 Выполнение канавок с помощью тонких упругих колец и отсутствие пересекающихся винтовых канавок правого и левого направлений дает конструктивную возможность уменьшить ш.аг однозаходной винтовой канавки, что в свою очередь позволяет
уменьшить передаточное отношение (в данном случае отношение длины хода ведомого звена за один оборот ведущего) механизма. Это также улучшает динамическую характеристику и расширяет кинематические возможности механизма.
Взаимодействующая с роликами часть внешнего звена состоит из простых в конструктивном .отношении и технологических колец, установленных в пазах стоек. Такое выполнение ее повышает технологичность изготовления механизма практически с любой длиной хода, что в свою очередь, расширяет его кинематические возможности.
Внутреннее звено может содержать большое количество симметрично размещенных роликов или блоков роликов, одновременно взаимодействующих с канавками внешнего звена. Это во много раз повышает нагрузочную способность механизма. Формула изобретения Механизм преобразования вращательного движения в возвратно-поступательное, содержащий корпус, ведущий вал, соединенное с ним внутреннее звено, установленное в корпусе внешнее звено, соосное с внутренним звеном, и ролики, размещенные между внутренним и внешним звеньями, установленные каждый с возможностью вращения и поворота вокруг радиальной оси, отличающийся тем, что, с целью расширения кинематических возможностей, повышения плавности движения и нагрузочной способности, внутреннее звено выполнено в виде двух параллельных
одно другому коромысел, установленного с возможностью осевого перемещения водила, связанного шарнирно с каждым из коромысел, и двух связанных шарнирно с соответствующими коромыслами парзллельных стоек, внешнее звено выполнено в виде по крайней мере трех параллельных одна другой планок, установленных с возможностью дискретного перемещения в осевом направлении друг относительно друга, и упругих разрезных колец, установленных последовательно с постоянным шагом и каждое с возможностью поворота в плоскости своей оси, при этом концы колец размещены в соответствующих планках, а
ролики установлены на стойках и предназначены для взаимодействия с торцами колец.
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ВОЗВРАТНО-ПОСТУНАТЕЛЬНОЕ ДВИЖЕНИЕ | 1970 |
|
SU453518A1 |
| Мотовило с управляемыми планками | 1959 |
|
SU130737A1 |
| ВАКУУМНЫЙ ЩЕЛЕВОЙ ЗАТВОР | 2022 |
|
RU2780115C1 |
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ В ОДНОСТОРОННЕЕ ВРАЩАТЕЛЬНОЕ | 1992 |
|
RU2111395C1 |
| УСТРОЙСТВО И СПОСОБ ПРЕОБРАЗОВАНИЯ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ В ОДНОСТОРОННЕЕ ВРАЩАТЕЛЬНОЕ | 1992 |
|
RU2111394C1 |
| ВОСЬМИЦИЛИНДРОВЫЙ МЕХАНИЗМ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ВОЗВРАТНО-ПОСТУПАТЕЛЬНОЕ И НАОБОРОТ | 2014 |
|
RU2603045C2 |
| УСТРОЙСТВО ДЛЯ НАНЕСЕНИЯ ПОКРЫТИЙ НА ПОРОШКОВЫЕ МАТЕРИАЛЫ | 2021 |
|
RU2767099C1 |
| МЕХАНИЗМ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ВОЗВРАТНО-ПОСТУПАТЕЛЬНОЕ И НАОБОРОТ | 2013 |
|
RU2552403C2 |
| Многовыходной преобразователь движения | 1989 |
|
SU1807272A1 |
| УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ВОЗВРАТНО-ПОСТУПАТЕЛЬНОЕ И НАОБОРОТ | 2012 |
|
RU2499934C2 |
Изобретение относится к машиностроению, а именно к устройствам для преобразования вращательного движения в возвратно-поступательное, и может быть использовано в качестве привода плунжерного насоса. Целью изобретения является расширение кинематических возможностей, повышение плавности движения и нагрузочной способности, Для этого внутреннее звено 4 выполнено в виде двух параллельных одно другому коромысел, установленного с возможностью перемещения водила. Внешнее звено выполнено в виде по крайней мере трех параллельных одна другой планок, установленных с возможностью дискретного перемещения в осевом направлении, и упругих разрезных колец, установленных с постоянным шагом. При вращении звена в зависимости отобра- зованной кольцами канавки внешнее звено находится в покое, перемещается вверх и вниз. Перемещением планок производится изменение шага канавки и тем самым изменяются скорость и направление звена. 5 ил.
| Передача для преобразования вращательного движения в возвратно-поступательное | 1958 |
|
SU121629A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| МЕХАНИЗМ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ВОЗВРАТНО-ПОСТУНАТЕЛЬНОЕ ДВИЖЕНИЕ | 1970 |
|
SU453518A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
