1
Изобретение может быть использовано в аналоговых или цифровых вычислительных устройствах для интегрирования величин, представленных электрическим напряжением постоянного тока.
Известны системы регулирования скорости двигателя, содержащие задающий блок, датчик входного сигнала, усилитель - преобразователь с управляемым двигателем, опорный двигатель, подключеппый к выходу усилителя мощности, в котором угол поворота выходного вала редуктора пропорционален интегралу от входного сигнала по времени.
Однако принцип построения этой системы, функциональные связи между используемыми в ней элементами не позволяют получить высокую точность регулирования скорости.
Цель изобретения - разработка электромеханического интегратора, функциональная схема которого гарантирует прецизионное преобразование входного напряжения в угловую скорость вращения выходной механической оси, т. е. высокую точность интегрирования.
Для осуществления этой цели электромеханический интегратор содержит задающий блок, состоящий из источника опорного .напряжения и подключенные к его выходу последовательно соединенные датчик и выходной сумматор, в датчике скорости установлены последовательно включенные импульсный
датчик скорости, формирователь, первая схема совпадения, мультивибратор, триггер и подключенный к выходу источника опорного напряжения задающего блока выходной нормирующий блок, подсоединенная к управляющему входу триггера вторая схема совпадения, соединенная входами с выходами ждущего мультивибратора и триггера, и опорный генератор, связанный с входами обеих
схем совпадения и через дополнительно установленный де.читель частоты - с усилителем мощности.
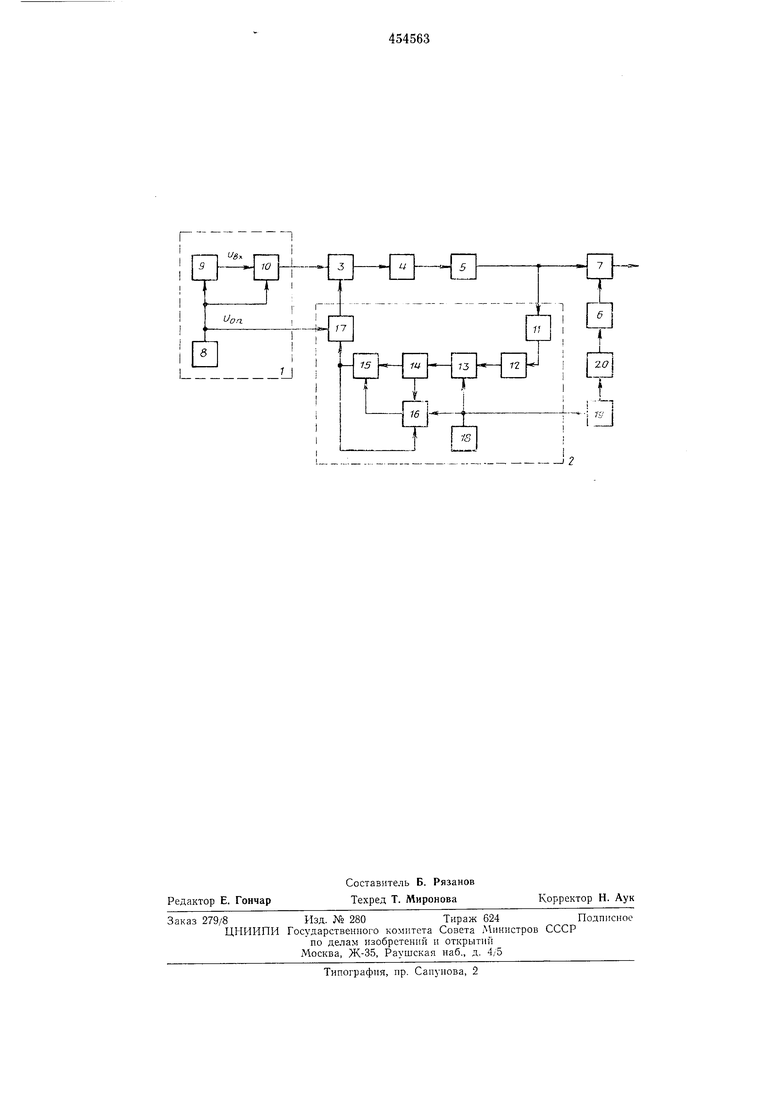
На чертеже изображена функциональная схема предлагаемого электромеханического
интегратора.
Предлагаемый интегратор содержит задающий блок 1, датчик скорости 2, сравнивающий блок 3, усилитель-преобразователь 4, управляемый двигатель 5, опорпый двигатель
G, механический дифференциал 7, источник 8 опорного напряжения, датчик 9 входного сигнала, выходной сумматор 10, импульсный датчик 11 скорости, формирователь 12, первую схему совпадения 13, ждущий мультивибратор
14, триггер 15, вторую схему совпадения 16, выходной нормирующий блок 17, опорпый генератор 18, стабилизированный кварцем, делитель 19 частоты и усилитель 20 мощности. Задающий блок 1 интегратора вырабатывает управляющее воздействие, поступающее на первый вход сравнивающего блока 3 системы регулирования скорости вращения вала управляемого двигателя 5. Управляющее воздействие получается на выходе выходного сумматора 10 в результате сложения опорного напряжения Lon, снимаемого с выхода источника 8, и сигнала UK датчика входного сигнала 9. Причем напряжение t/Bx молсет быть знакопеременным, но по величине оно всегда пропорционально напряжению оп. На второй вход сравнивающего блока 3 приходит сигнал обратной связи системы регулирования скорости управляемого двигателя 5. Снимаемый с выхода блока 3 сигнал разности, пройдя усилитель-преобразователь 4, в виде напряжения постоянного тока подается на якорь управляемого двигателя 5. Ма валу последнего укреплен имнульсный датчик скорости 11. Его выходные импульсы, пройдя формирователь 12, вместе с импульсами опорного генератора 18 поступают на вход устройства нормирования импульсов сигнала обратной связи системы регулирования по длительности. Это устройство состоит из двух схем совпадения 13 и 16, ждущего мультивибратора 14 и триггера 15, снабженных такими функциональными связями, которые обесг ечивают появление на выходе триггера 15 импульса длительностью, равпой целому и неизменному числу периодов следования импульсов опорного генератора 18 на каждый импульс, нроходящий с выхода формирователя 12. Выходные импульсы триггера 15 поступают на вход выходного нормирующего блока 17 системы регулирования скорости, где оаи нормируются по амплитуде на уровне Uon и затем в качестве сигнала обратной связи нодаются на вход сравнивающего блока 3. Таким образом все входные сигналы и сигнал обратной связи системы регулирования скорости вращения вала управляемого двигателя 5 пропорциональны напряжению Uoa, вырабатываемому источником 8. Это обстоятельство нри достаточно большой величине коэффициента передачи усилителя-преобразователя 4 позволяет избавиться от зависимости скорости вращения вала двигателя 5 от напряжения оп. Выходной координатой электромеханического интегратора является угол поворота ф механического дифференциала 7, входные валы которого связаны с валами управляемого двигателя 5 и опорного двигателя 6. Последний, являясь синхронным двигателем, получает питание от усилителя мощности 20, да вход которого поступает сигнал опорного генератора 18, преобразованный по частоте делителем частоты 19. Весь интегратор настраивается таким образом, чтобы при напряжении t/Bx, равном нулю, выходные валы управляемого 5 и опорного 6 двигателей вращались в разные стороны с одинаковыми скоростями, а выходная ось мехалического дифференциала 7 была бы ненодвижной. Высокая точность ишсгриро зания предлагаемым устройством достигается путем введения функциональных связей между источником опорного напряжения 8, датчиком входного сигнала 9, выходным сумматором 10 и выходным нормирующим блоком 17. Это позволило устранить зависимость скорости вращения нала управляемого двигателя 5 от величины опорного напряжения t/on источника 8 и значительно снизить требования к его стабильности. Кроме того, применение соединений (см. чертеж) между импульсным датчиком скорости 11, формирователем 12, схемами совнадения 13 и 16, ждущим мультивибратором 14, триггером 15, выходным нормирующим блоком 17 и опорпым генератором 18 позволило на каждый импульс датчика скорости 11 сформировать выходной импульс блока 17 длительностью, равной целому и неизменному числу периодов синусоидального сигнала, вырабатываелюго опорным генератором 18, стабилизированного кварцем, т. е. обеснечить высокую стабильность коэффициента нередачи датчика скорости 2 в широком диапазоне изменения параметров окружающей среды. Реализация электромеханического интегратора 110 описанной функциональной схеме дала возможность обеспечить точность ннтегрирования ±0,1% в диапазоне температур окружающей среды -20-;--|-60 С. Пред м е т и з о б р е т е н и я Электромеханический интегратор, содержащий задающий блок и датчик скорости, подключенные к сравнивающему блоку, связанному через усилитель-преобразователь с управляемым двигателем, соединенным с датчиком скорости и одним из входов механического дифференциала, ко второму входу которого подсоединен опорный двигатель, подключенный к выходу усилителя мощности, отличающийся тем, что, с целью повышения точпостп интегрирования, в нем задающий блок содержит источник онорного нанряжения и подключенные к его выходу последовательно соединенные датчик и выходной сумматор; в датчике скорости установлены поледовательно включенные импульсный датчик скорости, формирователь, нервая схема овпадения, мультивибратор, триггер и подключенный к выходу источника онорного наряжения задающего блока выходной нормиующий блок, нодсоединенная к управляюему входу триггера вторая схема совпадеия, соедипенная входами с выходами ждущео мультивибратора и триггера, и опорный енератор, связанный с входами обеих схем овпадения и через дополнительно установенный делитель частоты - с усилнтелем ощности.
и
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения неравномерности скорости вращения объекта | 1979 |
|
SU792146A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СКОРОСТИ ВРАЩЕНИЯ | 1972 |
|
SU412553A1 |
| Устройство для стабилизации скорости электродвигателя | 1980 |
|
SU921013A1 |
| Цифровой фазометр низких и инфранизких частот | 1975 |
|
SU746323A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ОБЪЕКТОВ | 1992 |
|
RU2065569C1 |
| Устройство для вибрационных испытаний лентопротяжных механизмов кассетных магнитофонов | 1991 |
|
SU1770981A1 |
| Устройство для измерения температуры | 1984 |
|
SU1268970A1 |
| Устройство для акустического контроля материалов и изделий | 1988 |
|
SU1562844A1 |
| Устройство автоматической стабилизации скорости движения носителя магнитной записи | 1983 |
|
SU1115102A1 |
| Электропривод постоянного тока | 1984 |
|
SU1241397A1 |