25
Изобретение относится к электротехнике и может быть использовано в автоматизированном электроприводе постоянного тока с высокой точностью стабилиза1ши скорости.5
Цель изобретения - повышение точности стабилизации скорости.
На фиг, 1 изображена схема злектро- привода постоянного токау на фиг.2 - эпюры напряжений.JO
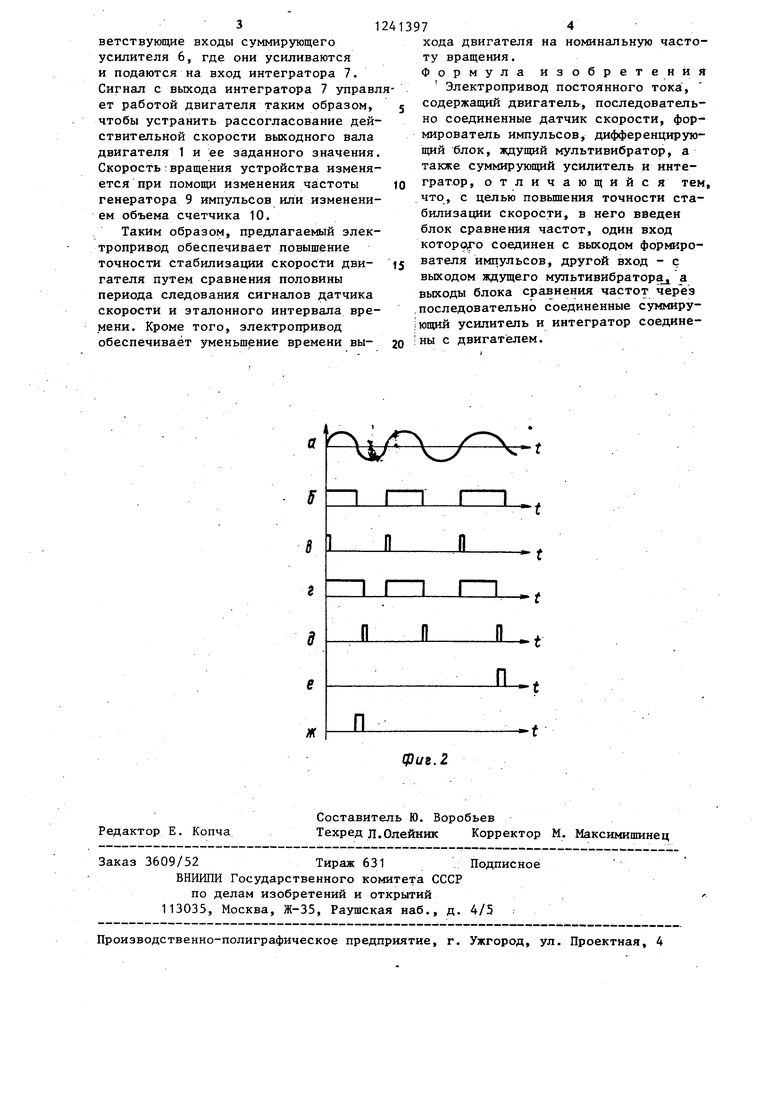
Электропривод постоянного тока содержит двигатель 1, последовательно соединенные датчик 2 скорости, формирователь 3 импульсов, дифференцирующий блок 4, ждущий мультивибратор is 5, а также суммирующий усилитель 6 и интегратор 7, блок 8 сравнения частот, один.вход которого соединен с выходом формирователя 3 импульсов, другой вход - с выходом ясдущего муль- 20 тивибратора 5, а выходы блока 8 сравнения .частот через последовательно соединенные суммирующий усилитель 6 и интегратор. 7 соединены с двигателем 1. Ждущий мультивибратор 5 содержит последовательно соединенные генератор 9 импульсов, счетчик 10 и триггер 11, при этом второй вход триггера 11 является входом ждущего мультивибратора 5, выходом которого является выход триггера 11, соели- ненный со счетным входом счетчика 10.
Электропривод работает следующим образом.
Работа электропривода основана на синхронизации числа оборотов двигателя путем сравнения половины периода следования сигналов с выхода датчика 2 скорости с эталонным интервалом времени, формируемым ждущим мультивибратором 5. При этом каждый сигнал датчика 2 скорости определяет да- чало формирования каждого эталонного интервала времени. Включение устройства производится подаче на него напряжения питания.
Формирователь 3 импульсов, реали- .зованньщ, например, на триггере Шмидта имеет на выходе сигнгип 1 при отсутствии импульса с датчика 2 скорости и сигнал О - при наличии на входе указанного импульса.
Таким образом,в момент включения устройства на перв ый вход блока 8 сравнения частот поступает сигнал 1 (А), на второй вход - сигнал О (В), что соответствует режиму разгона двигателя 1. При этом разностный сигнал (А В) с первого выхода бло30
35
40
4S
SO
ка 8 сравнения частот поступает на неинвертирующий вход суммирующего усилителя 6, далее на интегратор 7 и двигатель 1, который начинает вращаться. Переменное напряжение, частота которого пропорциональна скорости вращения выходного вала двигателя 1 „ с выг:ода датчика 2 скорости (фиг„2й) пост упает на вход формирователя 3 импульсов. С выхода формирователя 3 импульсов напряжение (фиг.2S) поступает на вход дифференцирующего блока 4, которьш вырабатывает узкие импульсы (фиг. 21} Эти импульсы с выхода дифференцирующего блока 4 поступают на вход триггера 11. На триггере 11 с помощью счетчика 10 и генератора 9 импульсов формируются импульсы эталонной длительности. Поступающий на первый вход триггера 11 импульс с дифференцирующего блока 4 переводит триггер в положение. Сигнал 1 с выхода триггера.11 (фиг. 2а) , представляющий первый вход счетчика 10, который начинает, считать импульсы стабильной частоты, пода:нные на его второй вход с генератора 9 импульсов. При поступлении за,цанного количества импульсов на выходе счетчика 10 формируется импульс О и счет прекращается. При посту:плении очередного импульса с дифференцирукщего блока 4 цикл повторяется. В результате на выходе триггера 11 образуется сигнал (фиг. 2т,), представляющий собой последовательность импульсов эталонной длительности, частота и скважность которых пропорциональна скорости вращения вала двигателя 1.
Сигналы эт,алонной длительности при этом строго синфазны с сигналами датчика 2 скорости, что обеспечивает устойчивость синхронизации в большом диапазоне регулирования и надежность работы устройства. В блоке 8 сравнения частот происходит сравнение половины периода следования сигналов датчика 2 скорости с эталонным интервалом 1времени и выдача по одному из двух выходов (фиг. ,2е,ж), в зависимости от знака рассогласования (А В, ), последовательности импульсов, длительность которых пропорциональна разности fiacTOT измеренного и эталонного ригналов. Сигналы с выходов блока 8 сравнения частот поступают на соответствующие входы суммирующего усилителя 6, где они усиливаются и подаются на вход интегратора 7. Сигнал с выхода интегратора 7 управлет работой двигателя таким образом, чтобы устранить рассогласование действительной скорости выходного вала двигателя 1 и ее заданного значения Скорость:вращения устройства изменяется при помощи изменения частоты генератора 9 импульсов или изменением объема счетчика 10.
Таким образом, предлагаемый электропривод обеспечивает повыщение точности стабилизации скорости дви- гателя путем сравнения половины периода следования сигналов датчика скорости и эталонного интервала времени. Кроме того, электропривод обеспечивает уменьшение времени вы-
хода двигателя на номинальную частоту вращения. Формула изобретения
Электропривод постоянного тока, содержащий двигатель, последовательно соединенные датчик скорости, формирователь импульсов, дифференцирующий блок, ждущий мультивибратор, а также суммирующий усилитель и интегратор, отличающийся тем что, с целью повышения точности стабилизации скорости, в него введен блок сравнения частот, один вход которо,го соединен с выходом формирователя импульсов, другой вход - с выходом ждущего мультивибратора, а выходы блока сравнения частот через .последовательно соединенные суммиру- |ющий усилитель и интегратор соедине- iны с двигателем.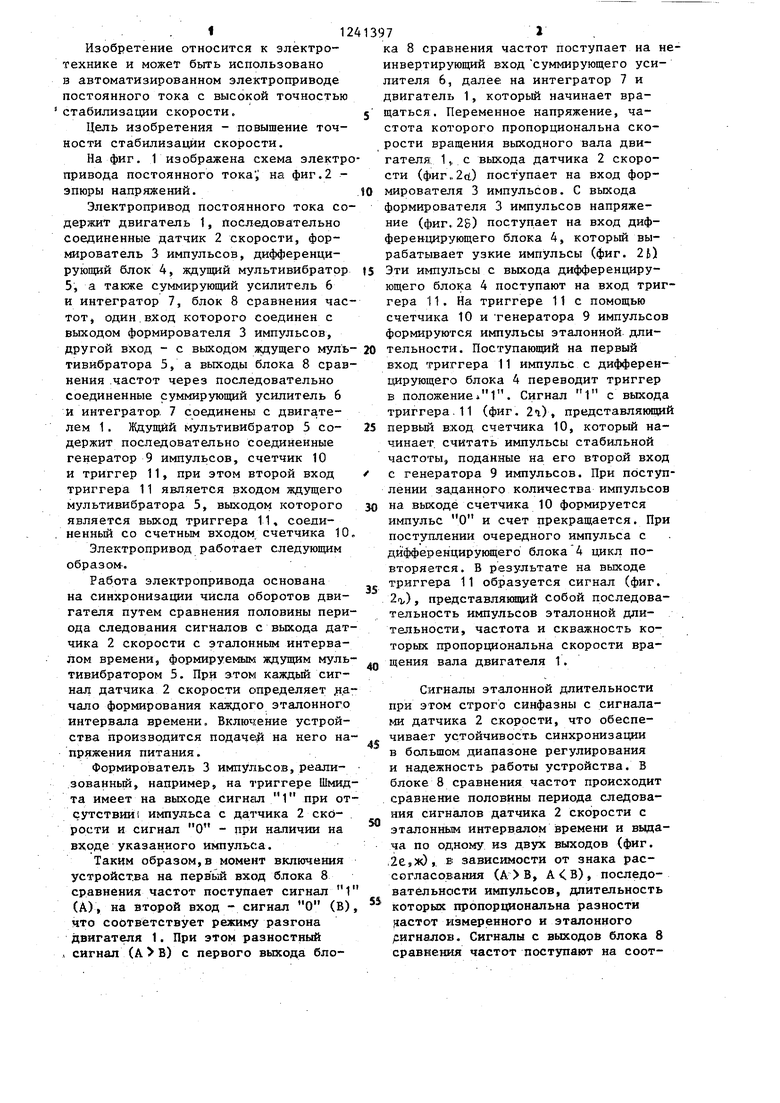
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для стабилизации скорости электродвигателя | 1980 |
|
SU921013A1 |
| Электропривод постоянного тока | 1989 |
|
SU1697238A1 |
| РЕГУЛЯТОР ЧАСТОТЫ ВРАЩЕНИЯ ПРИВОДА ШВЕЙНОЙ МАШИНЫ | 1992 |
|
RU2026906C1 |
| Устройство автоматической стабилизации скорости движения носителя магнитной записи | 1983 |
|
SU1115102A1 |
| Устройство для измерения ускорений | 2022 |
|
RU2793846C1 |
| Стабилизатор переменного напряжения | 1988 |
|
SU1534434A1 |
| Устройство для воспроизведения сигналов цифровой информации с носителя магнитной записи | 1982 |
|
SU1046764A2 |
| Устройство управления двигательным аппаратом | 1988 |
|
SU1577784A1 |
| Устройство для измерения неравномерности скорости вращения объекта | 1979 |
|
SU792146A1 |
| Устройство для стабилизации частоты вращения асинхронного электродвигателя с фазным ротором | 1981 |
|
SU1077039A1 |
Изобретение относится к электротехнике и может быть использовано в автоматизированном электроприводе постоянного тока. Цель изобретения повышение точности стабилизации скорости. Устройство содержит двигатель. 1, датчик скорости (ДС) 2, формирователь 3 импульсов, дифференцирующий блок 4, ждущий мультивибратор 5, суммирующий усилитель 6 и интегратор 7. Введение блока сравнения частот 8 и подключение его соответствующим образом о беспечивает сравнение половины периода следования сигналов ДС 2 и эталонного интервала времени. Кроме того, электропривод обеспечивает уменьшение времени выхода двигателя на номинальную частоту вращения . 2 ил. (О ю 4 :д9 ;о 
в
ж
Редактор Е. Копча
Составитель Ю. Воробьев
Техред л.Олейник Корректор М. Максимишинец
Заказ 3609/52Тираж 631 . Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
п
фиг,2
