1
Изобретение относится к средствам автоматики и измерительной техники и может быть использовано в системах управления с электрическим способом формирования исходного сигнала, а также для нолучения гармонических колебаний различной формы при различных исследованиях.
Известны преобразователи электрических сигналов в перемещение, содержащие рабочий и возвращающий электромагниты, в зазоре между которыми расположено ярмо с щтоком, соединенным с двумя упругими мембранами, закрепленными на проти воположных торцах корпуса, и с якорем индукционного дифференциального датчика перемещения, катущки которого соединены с блоком ввода сигнала смен;ення, два усилителя, которые охвачены отрицательными обратными связями и присоединены выходами к обмоткам соответственно рабочего и возвращающего электромагнитов, источник нитающего напряжения и источник напряжевия смещения.
Извест1 ые преобразователи такого типа не обеспечивают автоматический контроль погрешности -отработки сигнала, а также не позволяют устранить влияние конструктивной нечувствительности, что затрудняет возможности их использования для ответственных схем управления и повыщает суммарную погрещность.
Кроме того, характеристики таких преобразователей определяются главным образом суммарным зазором между электромагнитами и ярмом и их равенством в среднем положении ярма при отсутствии сигнала управления. При малом рабочем ходе ярма для таких преобразователей (до 1,5 мм) даже отклонение зазора 0,1 мм приводит к изменению характеристик, что требует кропотливой пастройки устройства. Достигается это за счет установки набора прокладок между электромагнитами и корпусом, к которому крепятся электромагниты. При значительных усилиях, которые развивает преобразователь при работе, набор прокладок деформируется, что измепяет его характеристики; значительные затруднения возникают нрн сборке и наладке вновь изготовленных устройств, а также при ремонтах.
Цель изобретения - повьппение надежности ц стабильности работы преобразователя. Для достижения этой цели преобразователь содержит два сумматора, первые входы которых подключены к источнику преобразуемого сигнала, а выходы соединены соответственно с входамп первого и второго усилителей, четыре реле, сумматор защиты н два дифференцирующих элемента, один из которых включен в цепь положительной обратной
связи первого усилителя и присоединен БЫходом к обмотке рабочего электромагнита, а другой включен .между выходом блока ввода сигнала смещения и вторыми входами нервого и второго сул1маторов, входы сумматора защиты соединенв соответственно с источником преобразуемого сигнала и с выходом блока ввода сигнала смещения, а его выход подключен через реле с задержкой и размыкающий контакт реле, ирисоединенного обмоткой к источнику преобразуемого сигнала, к шине управления, источник питающего напряжения подключен к усилителям через размыкающий контакт реле, обмотка которого соединена с тем же источником, а источник напряжения смещения подключен к третьим входам первого и второго сумматоров через размыкающий контакт реле, обмотка которого соединена с источником преобразуемого сигнала.
Дополнительпо преобразователь может содержать калиброванное но толщине проставочное кольцо из не.магнитпого материала, которое жестко соединено с рабочим и возвращающим электромагнитами и с общим фланцем корпуса.
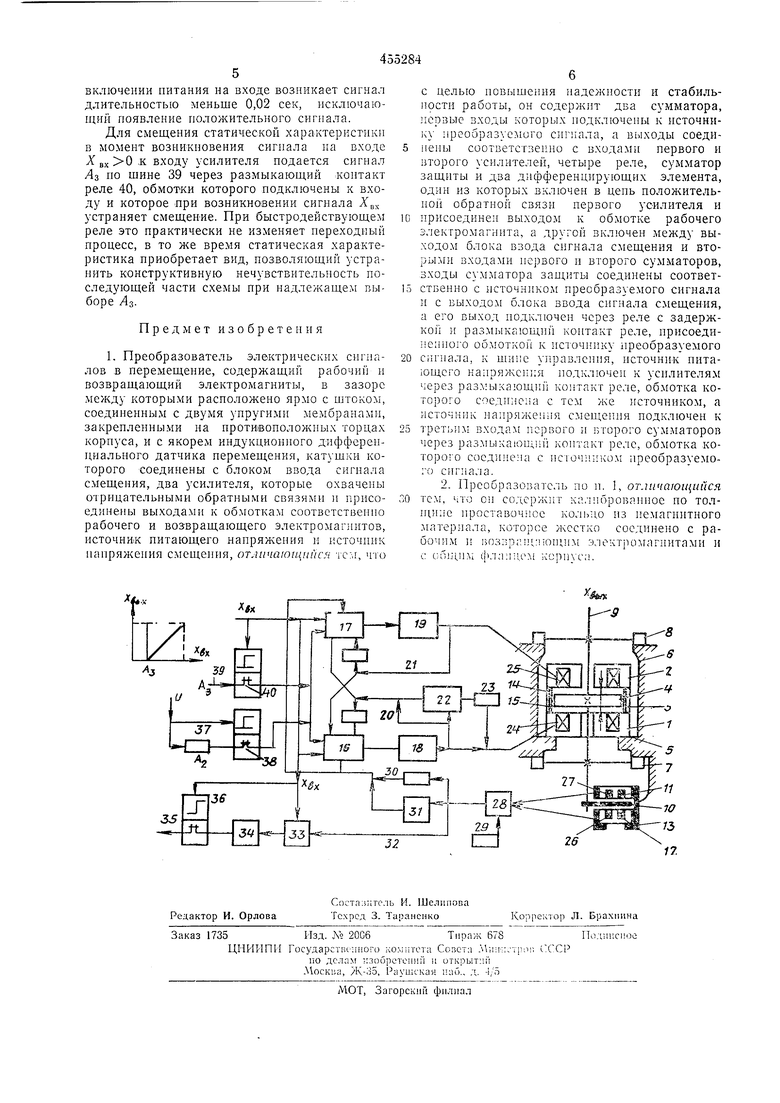
На чертеже изображена конструктивная схема преобразователя с ирипциниальной схеMoii усилителя, дифференциальной защитой, средствами предупреждения возппкновепия сигналов при включении питания и смещеппя статической характеристики.
Рабочий 1 и возвращающий 2 электромагниты соедииеиы .между собой через ироставочное шлифованное кольцо 3, обеспечивающее заданньи су.ммарный зазор между электро.магнитами 1, 2 и ярмом 4. Общим фланце.м 5 (как один блок с расноложенпы.м внутри яр.мо.м) электромагпиты 1 и 2 кренятся к корнхсу 6 преобразователя, на котором закреплены мембраны 7 и 8, в которых жестко закрепляется иггок 9 с ярмом 4. К иггоку 9 прикреплен якорь 10 датчика положения, электромагннты 11 и 12 которого закреплены в общем стакане 13 и .могут С015местно смещаться относительно корпуса 6, папри.1ер, с помощью диффереппнальной raiiKH (не показана).
Сборка вновь изготовленного преобразователя производится в слсдуюп.1ей последовательности, обеснечиваюиюй полное повторение характеристик.
Предварительио за счет подрезки торнов упоров па штоке 9 или мембранах 7 и 8 обеспечивается треб -емый минимальный раснор .мембран (без нрокладок) - 15-ЗОУа рабоче|о хода. Собирают магпитопроводы 1,2с ярмом 4 между ними. Шток укрепляют в нижней мембране 7, кренят блок электромагнитов, устанавливают верхшою мембрапу 8, по индикатору проверяют зазоры ярма AI и Да, по которым устанавливают величину необ.ходимой подрезки фланца 5. После подрезки наклеивают прокладки 14 и 15 (из паранита, пресшпана), являющееся упорами для ярма, иредупреждающими расклепывание электромагнитов (максимальное усилие достигает при ул.а-ре оОО кг.). При этом ход в сторону рабочего элеКтромаг.нита делают .меньше зазора AI на 0,1-0,15 мм, а .ход в сторону возвращающего - электромагнита-- -5-10% от Д2. Такое соог5 ношение рабочих ходов обеспечивает дополнительиое улучшение качества переходного процесса. Воз.можные неточности после сборки устраняют нерестаноВКОЙ положения корнуса датчика и электрической схемой. Входной 10 сигнал А вх нодается к сумматорам 16, 17 усилителе 18, 19. Усилители охвачены обратными связя.ми 20, 21 по выходному сигналу за каждым силителе.м в соответствии со. схе.мой. Усилитель 18, кроме того, охвачеи полоJ- жительиой обратиой связью 22 по производ-ной. Этот же сигнал с коэффициентом подается как сигнал форспровки через масн табное звено 23 к рабочей обмотке электромагнит 24, который является нагрузкой усилителя 18 ,Q (иагрузкой усилителя 19 является об.мотка 25).
Катушки 26, 27 датчика положения иодключаются к входу через узел 28 ввода сигнала смещеиия характеристики (например, через потеицио.метр), которое может задаваться вручпую вводом 29. Сигнал обратиой связи от датчика по шиие 30 поступает к сумматорам . 16 и 17. Кроме того, при необходимости вводится сигиал иоложительной обратиой связи 30 31 по скорости изменения за счет, например, установки инерционного звеиа.
Сигиал от датчика положения по шине 32, при необходи.мости лииеаризованиый за счет включения пели гейных статических звеньев, 5 и входной сигиал X „. ностуиают к су.мматор) защиты 33 (нанри.мер, па две независимые обмотки .дифферени.иальпого реле). Срабатывание реле 34 происходит, если разность сигналов па выходе су.мматора 33 превысит заданную зону срабатывания реле 34. В этом случае появляется сигнал иа шиие 35, используемый для отключения устройства и инфор.мации о ноиснравиости. Для предупреждения ложной работы защиты, вызванной отставапп5 ем сигнала на шине 32 от х реле 34 и.меет задержку времени срабатывания, при вы соком б1)1стродействии преобразователя достаточна задержка иа 7-10 мсек. Такая задержка достаточна при подаче нормальиых сигпа0 лов управления, включая номинальные. В случае же нодачи форсированных сигналов, превышающих единичный, цепь сигнала иа шине управления 35 разрывается с помощью реле 36, на обмотку которого подается сигнал X g 5 и которое имеет зону срабатывания Азб, что исключает работу реле 36 при малых сигпалах.
Для предуиреждеиия возникновения сигнала на выходе при включеиии питания наиря0 жепие натания U в полярности, противоположн-ой /f вх с амплитудой AZ, задаваемой, папри.мер, потенциометром 37, подается па вход усилителей через размыкающий контакт реле 38. Обмотка реле 38 подключена к аитающему нанряжению, в результате Чего 
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для дифференциально-фазной защиты | 1982 |
|
SU1113866A1 |
| Устройство для контроля исправности релейной защиты | 1988 |
|
SU1561054A1 |
| Устройство для контроля рабочих зазо-POB элЕКТРОМАгНиТНОгО РЕлЕ | 1977 |
|
SU809069A1 |
| Устройство для регулирования тока якоря электродвигателя | 1979 |
|
SU860247A2 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ КЛАПАНОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2022 |
|
RU2783869C1 |
| Устройство для оптимизации фотосинтеза растений | 1989 |
|
SU1690611A1 |
| Устройство для стабилизированного питания приемников энергии | 1987 |
|
SU1545290A1 |
| Устройство для дифференциальной защиты преобразовательной установки | 1986 |
|
SU1319154A1 |
| Система контроля уровня жидкости | 1975 |
|
SU625636A3 |
| Устройство для измерения механических параметров электромагнитных аппаратов | 1980 |
|
SU1091123A1 |
