При работе электрических машин (генераторов и электродвигателей) приходится регулировать: у генератора- даваемое им напряжение, у электродвигателя-число оборотов его по заранее заданному закону. Большей частью такая регулировка сводится к поддержанию постоянного напряжения генератора при различных электрических нагрузках (регуляторы напряжения) или к поддержанию постоянного числа оборотов двигателя при различных механических нагрузках (регуляторы числа оборотов). Однако, не исключена возможность необходимости и другого рода закономерного регулирования напряжения генератора (или числа оборотов двигателя) по заранее заданному графику.
Предлагаемое устройство относится к таким регуляторам режима работы по заданному графику. Как и в некоторых известных регуляторах, в предлагаемом устройстве подвижный контактный палец измерительного прибора или реле, контролирующего регулируемую величину (напряжение, скорость и т. п.), может перемеш,аться вдоль контактной поверхности; последняя вьшолнена из двух частей, разделенных изолирующим промежутком, имеющим форму кривой, по которой производится регулирование; эти две контактные части соединены
(224)
С разноименными полюсами источника тока, питающего цепь управления, в которую включен электромагнитный прибор, управляющий регулирующим режим работы механизмом (например, регулировочным реостатом) таким образом, что соприкосновение контактного пальца с металлом контактной поверхности производит переключение указанного электромагнитного прибора.
В предлагаемом устройстве, согласно изобретению, обмотки двух соленоидов, образующих с общим для них поляризованным якорем упомянутый электромагнитный прибор, присоединены электрическ:- к двум контактам указанного контактного пальца, соприкасающимся с двумя контактными поверхностями, одинаковые части которых присоединены к разноименным полюсам источника тока, это сделано с той целью, чтобы перемещения контактов по ту и другую сторону изолирующих промежутков вызывало реверсирование тока в соленоидах и колебательное движение поляризованного якоря.
Предлагаемое устройство может быть выполнено и с одной контактной поверхностью. С целью уменьщения числа контактных поверхностей до одной.,.С Редняя точка источника тока ) электрически соединена с
: F ; V
г- . Ънов цепи, образованной обмотками соленоидов, другой конец которой присоединен к контактному пальцу.
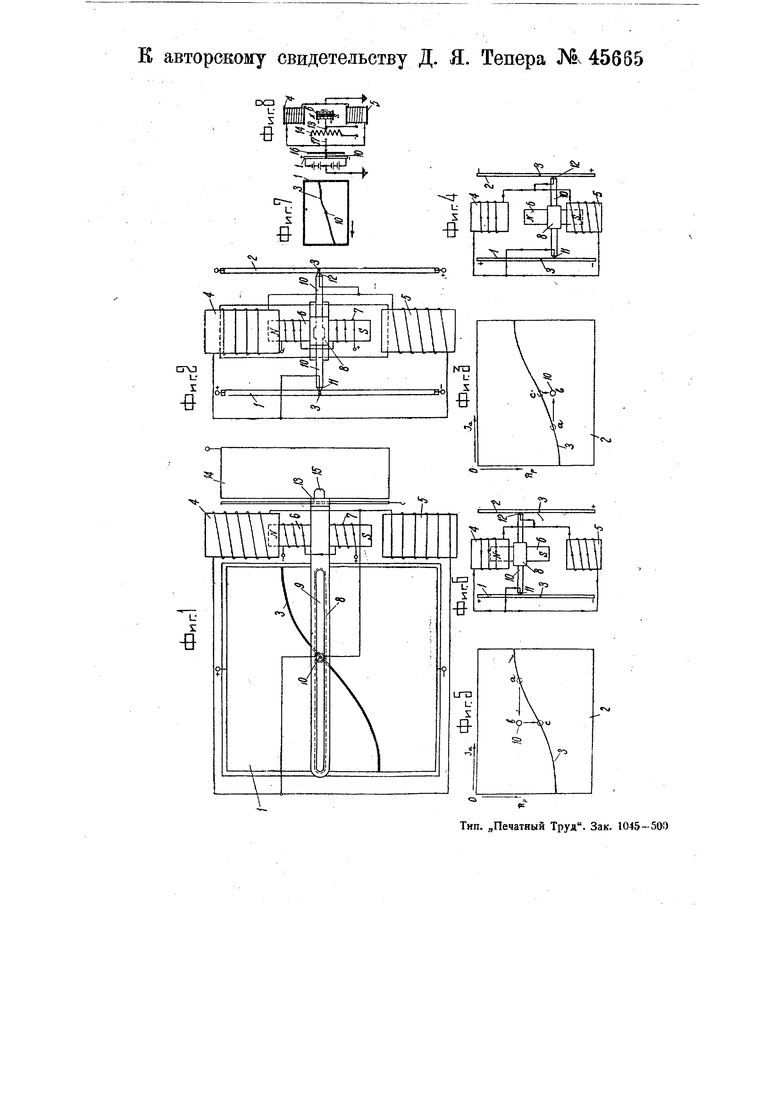
На чертеже фиг. 1-2 схематически изображают предлагаемое устройство в двух проекциях; фиг. 3-4-положение контактных частей устройства по фиг. 1 - 2 в двух проекциях в один из моментов работы устройства; фиг. 5-6-то же в другой из моментов; фиг. 7-8-положение контактных частей видоизмененного устройства в один из моментов работы.
Предлагаемое устройство по фиг. 1- 6 состоит из двух металлических контакт,«ых поверхностей / и 2, состоящих каждая из двух частей, разделенных электрически изолирующим промежутком 3. Форма этого промежутка может быть прямолинейной или криволинейной соответственно той зависимости регулируемой величины (напряжения генератора, скорости двигателя и т. п ) от независимой переменной, которая требуется условиями работы регулируемой установки.
Между поверхностями 7 и 2 установлены два соленоида 4 и 5, имеющие общий поляризованный якорь б; последний представляет собою постоянный электромагнит с обмоткой 7. С якорем 6 соединен рычаг 8, снабженный прорезью Я В этой прорези установлен с возможностью перемещения контактный палец JO с двумя контактами 7/ и 72. Последние соприкасаются с поверхностями / и, соответственно, 2 и могут перемещаться вдоль них. Рычаг 8 соединен механически с движком 7J регулировочного реостата /4 со скользящим контактом /5.
Обе части каждой из поверхностей 7,2 присоединены (фиг. 4) к различным полюсам источника тока, причем одинаковые части разных поверхностей получают разную полярность; таким образом контакты П и 12 всегда получают поляр,ность и меняют ее при переходе изолирующего промежутка 5. Контакт 77 электрически соединен с одним из кончов соленоидов 4, 5, контакт 72-с другими из их концов (фиг. 4 и 6).
Палец W перемещается в прорезе 9 управляющим прибором, например, измерительным прибором или реле, реагирующим на изменения регулируемой величины.
Соленоиды 4, 5 якорь 6 образуют собою электромагнитный прибор, управляющий регулирующим режим работы механизмом, в данном частном случае- регулировочным реостатом 75, включенным в цепь управления регулируемой мащины, например, в цепь возбуждения генератора или двигателя и т. п. Для данного частного случая кривая на rioверхностях /, 2 представляет собою определенную путем расчета или эксперимента зависимость сопротивления реостата 75 от тока нагрузки регулируемой электрической мащины.
При холостой работе регулируемой мащины движок 75 реостата 75 и палец W устанавливаются в некотором начальном (холостом) положении а (фиг. 3), чему соответствует начальное сопротивление о регулирующего реостата; при этом контакты 77 и 72 плотно касаются контактных поверхностей 7 и 2.
В положении а контакты 77 и 12 пальца 10 касаются изоляционных кривых 3 контактных поверхностей. Следовательно, цепи соленоидов 4, 5 будут разомкнуты. Движок 75 с укрепленным на нем электромагнитом 6, 7 остается неподвижным.
При нагрузке машины ток /а, даваемый или потребляемый ею, растет. При этом управляющий режимом работы прибор (реле или измерительный прибор) вызовет перемещение пальца 10 из положения а в положение b (фиг. 3). Вследствие этого контакты II к J2 коснутся соответствующих частей поверхностей 7 и 2, находящихся под напряжением; через электромагнитный механизм , и 5 пройдет ток. Полярность соленоидов и 5 при этом окажется такой, что их взаимодействие с электромагнитом б, 7 вызовет перемещение движка 75 в положение с, соответствующее попаданию контактов 7/ и 72 пальца JO на изоляционные кривые 5 поверхностей 7 и 2. Легко видеть, что и всякое уменьщение тока вызывает смещение пальца W и контактов 77, 72 с изоляционных кривых (положение а на фиг. 5) на части поверхностей 7 и 2, находящиеся под напряжением (положение b на фиг. 5). Поскольку полярность указанных поверхностей при этом противоположна имевшей место при возрастании тока, то ясно, что изменится на обратную и полярность соленоидов 4 и 5, причем они, взаимодействуя с электромагнитом б, 7, вызовут перемещение движка 13 в обратном направлении, т. е. снова приведут к попаданию пальца 10 и контактов 11, 12 на изоляционные кривые 3 (положение с на фиг. 5).
Таким образом, при всяком изменении тока /а, даваемого или потребляемого машиной, имеет место автоматическое передвижение движка 13 регулировочного реостата 14 в положение, определяемое заданной графической зависимостью сопротивления реостата 14 от силы тока /а машины, благодаря чему и осуш;ествляется потребная для данной машины автоматическая регулировка напряжения (генератора) или числа оборотов (электродвигателя) по заранее заданному закону.
Следует отметить, что вместо движения пальца 10 в прорези рычага 8 можно применить обратное движение контактных поверхностей /, 2 в специальных направляюш,их ползунках. При этом указанные поверхности 7, 2 должны двигаться в направлении, обратном предполагавшемуся ранее движению пальца 10 (фиг. 3, 5).
Изоляция Б промежутках 3 расположена заподлицо с металлическими частями контактных поверхностей / и 2, благодаря чему осуществляется одинаковое нажатие контактного кольца 10 на контактные поверхности при всех его положениях. Путем изменения ширины промежутка 3 можно менять чувствительность устройства и величину вибрации контактного пальца 10.
Перемещение контактных поверхностей может производиться либо непосредственно указателем контрольно-измерительного прибора, либо же посредством специальной контрольной контактной поверхности. В последнем случае стрелка контрольно-измерительного прибора снабжается контактным пальцем, касания которого контрольной поверхности вызывают воздействия на механизм, перемещающий основные контактные поверхности. Одновременно с этим перемещается и контрольная поверхность. Оба перемещения прекращаются в тот момент, когда контактный палец контрольного реагирующего элемента будет касаться нейтральной изоляционной линии контрольной поверхности. Выбирая соответствующим, образом форму кривой, нанесенной на контрольную поверхность, можно достигнуть пропорциональности между значениями независимой переменной и соответствующими перемещениями (от нулевого положения) основных поверхностей, причем это может быть достигнуто и при неравномерной шкале контрольно-измерительного прибора.
В случае, если регулировка производится на постоянство режима работы (частный случай закономерной регулировки), то контактные поверхности могут быть выполнены неподвижными. При этом кривая, наносимая на их поверхности, должна иметь вид прямой, определяемой предельными значениями регулирумой величины, могущими встретиться для разных режимов работы данной машины.
Устройство может быть выполнено с одной контактной поверхностью. На фиг. 7, 8 изображен схематически такой вариант устройства, в котором контактная поверхность / перемещается в направлении стрелки, если регулирование происходит по меняющейся зависимости, или неподвижна, если регулирование производится на постоянное значение регулируемой величины. Металлические части поверхности / присоединены к полосам источника тока, средняя точка которого заземлена. Контактный палец 10 соединен с концами соленоидов -/ и 5, другие концы коих также заземлены. Контактный палец 10 механически связан со стрелкой 17 измерительного прибора 16 или реле. С якорем 6 соединены держатель пальца 10 и движок 13 реостата 14. Вместо реостата может быть применено и другое регулировочное приспособление, например, механизм для сдвига щеток электрической машины, впускной вентиль и т. п. Связь между регулировочным приспособлением и якорем 6 может как непосредственная, так и при помощи передачи, например, системы рычагов и т. п.
Если при данном значении независиСИМОЙ переменной (время, нагрузка и т. д.) регулируемая величина удовлетворяет заданному закону (графику), то контакт контактного па71ьца 10 будет касаться контактной поверхности / как раз в том месте, где нанесена изоляционная кривая 3. При этом цепь соленоидов и 5 окажется разомкнутой и, следовательно, устройство не будет действовать.
Предположим, что под влиянием ряда факторов регулируемая величина получила значение, большее, чем это ей предписано графиком контактной поверхности. Реагирующий элемент стрелка 77 с контактным пальцем W, который немедленно отметит это увеличение, регулируемой величины; при этом контакт пальца Ю будет приведен в соприкосновение с верхней металлической частью поверхности 7. В результате через цепь соленоидов 4, 5 пойдет ток; полярность соленоидов при этом окажется такой, что они, взаимодействуя с якорем 6, вызовут его перемещение, а следовательно, и соответстзующее перемещение органа 75 регулировки данной мащины. Перемещение органа регулировки вызовет уменьшение регулируемой величины и приведет его к значению, определяемому кривой 3 контактной поверхности, т. е. к значению, заранее заданному законом графика поверхности 7.
При некоторых видах регулировки по заранее заданному графику является необходимым контролировать, насколько регулируемая величина подчиняется заданному закону. В таком случае на контактную поверхность должна быть нанесена непосредственно заданная зависимость (график). Палец 10 в этом случае механически не должен быть связан с движком 75 регулировочного реостата. При этом палец 10 находится под воздействием регулируемой величины (путем механической связи с указателем электроизмерительного прибора или соответствующего реле). В остальном все части устройства останутся прежними. При этом всякое отклонение регулируемой величины от закона, нанесенного на график, вызывает прохождение тока через соленоиды 4, 5 и, следовательно, перемещение якоря 5 и движка 75 регулировочного реостата в соответствующую сторону. Для возможности установки
соответствия в перемещении движка необходимо концы соленоидов 4, 5 снабдить переключателем.
Предмет изобретения.
1.Устройство для автоматического регулирования режима работы по заданному графику, в котором подвижной контактный палец измерительного прибора или реле, контролирующего регулируемую величину (напряжение, скорость и т. п.), может перемещаться вдоль контактной поверхности, выполненной из двух частей, разделенных изолирующим промежутком, имеющим форму кривой, по которой производится регулирование, и соединенных с разноименными полюсами источника тока, питающего цепь управления, в которую включен электромагнитный прибор, управляющий регулирующим режим работы механизмом (например, регулировочным реостатом) таким образом, что соприкосновение контактного пальца с металлом контактной поверхности производит переключение указанного электромагнитного прибора, отличающееся тем, что обмотки двух соленоидов 4 я 5, образующих с общим для них поляризованным якорем 6 упомянутый электромагнитный прибор, присоединены электрически к двум контактам 11 и 72 указанного контактного пальца 10, соприкасающимся с двумя контактными поверхностями 7 и 2, одинаковые части которых присоединены к разноименным полюсам источника тока стой целью, чтобы перемещение контактов 77 и 72 по ту и другую сторону изолирующих промежутков 5 вызывало реверсирование тока в соленоидах 4, 5 н колебательное движение гюляризованного якоря 6.
2.Форма выполнения устройства по п. 1, отличающаяся тем, что контактный палец W подвижно расположен в прорези рычага 5, соединенного механически с якорем 6, с той целью, чтобы в случае перемещения пальца W с изолирующего промежутка на металл якорь 6 принудительно перемещал палец JO обратно на изолирующий промежуток.
3.Видоизменение устройства по пп. 1 и 2, отличающееся тем, что, с целью
уменьшения числа контактных поверхностей до одной, средняя точка источника тока электрически соединена с одним из концов цепи, образованной обмотками соленоидов, другой конец которой присоединен к контактному пальцу 10.
4. Форма выполнения устройства по пп. 1 - 3, отличающаяся тем, что для перемецдения контактных поверхностей применена контрольная контактная поверхность, управляющая механизмом
перемешения основных контактных поверхностей.
5.При устройстве по пп. 1-3 применение неподвижных контактных поверхностей с целью осуществления регулировки на постоянство режима работы.
6.При устройстве по пп. 1-5 применение таких контактных поверхностей / и 2, у которых металлические части и изолирующий промежуток расположены заподлицо, т. е. не образуют ступене.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКОЕ РЕГУЛИРУЮЩЕЕ УСТРОЙСТВО | 1934 |
|
SU45663A1 |
| Универсальная машина для разливочно-укупорочного производства | 1929 |
|
SU27569A1 |
| Устройство для автоматического регулирования постоянства температур в ряде точек | 1934 |
|
SU49383A1 |
| ЭЛЕКТРИЧЕСКИЙ ИЗВЕЩАТЕЛЬ ДЛЯ СИГНАЛИЗАЦИОННЫХ УСТРОЙСТВ | 1936 |
|
SU52380A1 |
| АППАРАТ ДЛЯ АВТОМАТИЧЕСКОГО ПРОИЗВОДСТВА ФОТОГРАФИЧЕСКИХ СНИМКОВ | 1925 |
|
SU12579A1 |
| Автоматический непрерывно действующий электрический прерыватель | 1929 |
|
SU22129A1 |
| Электрический максимальный прерыватель для ограничения силы тока в цепи потребления электрической энергии | 1924 |
|
SU2708A1 |
| Ваттметровый переключатель | 1937 |
|
SU60680A1 |
| Устройство для поддержания синхронного вращения электрических двигателей | 1937 |
|
SU53728A1 |
| УСТРОЙСТВО ДЛЯ ЭЛЕКТРИЧЕСКОЙ АСИНХРОННОЙ ПЕРЕДАЧИ ПОВОРОТОВ ВАЛА НА РАССТОЯНИЕ | 1924 |
|
SU3111A1 |