На прилагаемых чертежах даны схемы предлагаемого устройства для электрической асинхронной передачи.
В технике точной передачи определенных поворотов на расстояние применяется следующий метод, положенный в основу устройства соответствующих приборов. Контакты 1, 2, 3 со спиралями, изображенными на фиг. 1, представляют замкнутый кольцевой реостат, ток в который входит через две щетки α и β вращающиеся вокруг центра 0 вместе с (щеткодержателем) рычагом Z, к которому они прикреплены.
К точкам 1, 2, 3 (фиг. 1), расположенным на концах дуг в 120°, припаяны три провода 1, 1-2, 2-3, 3, идущие к концам обмоток: трех неподвижных электромагнитов I, II и III, соединенных звездой, оси которых наклонены друг к другу под углом в 120°. S представляет электромагнит, вращающийся вокруг 0′. Магнитное поле, возбуждающееся между тремя неподвижными электромагнитами I, II и III, вращается вполне синхронно с рычагом Z. Электромагнит S, увлекаемый полем магнитов I, II и III, также соверщает вращение, синхронное с вращением рычага Z. Точность передачи поворотов посредством телеаппарата такой конструкции, по указанию автора, не более +18°.
Если угол поворота рычага Z вокруг оси 0 назовем X и угол поворота якоря S вокруг оси 0 назовем Y, то предлагаемое устройство предназначено для осуществления передачи по закону Х=Y, т.-е. синхронной передачи, с точностью плюс, либо минус 18°, при этом крутящий момент, передаваемый устройством, должен быть весьма мал.
Предлагаемая система асинхронной передачи имеет целью предоставить возможность передавать на расстояние повороты по закону x-ƒ(y), где x=ƒ(у) представляет зависимость любого вида, при чем передача поворотов совершается с произвольной степенью точности и передаваемый системой крутящий момент может быть произвольной величины, кроме того, система снабжена приспособлением для первоначальной правильной установки и для контролирования собственного действия.
На фиг. 2F и G представляют зажимы + и - источников постоянного тока; АВ представляет кольцевой замкнутый (посредством провода Аωω′В) реостат, разделенный в точках 1, 2, 3…, 1′, 2′, 3′… на равное число частей; I-I′ и II-II′ - два ряда неподвижных изолированных друг от друга контактов. К проводам 1-1, 2-2, 3-3, припаянным в точках 1, 2, 3, 4 к кольцевому реостату АВ, присоединены отдельные, неподвижные контакты рядов I-I′ и II-II′. На той же фигуре YY представляет винтовой вал, по которому при его вращении движется винтовая шайба L. К винтовой шайбе L прикреплены три скользящих контакта +1, -2 и -3. Скользящие контакты +1 и -2 при любом положении шайбы касаются, одновременно двух неподвижных контактов рядов I-I′ и II-II′, соединенных электрически с двумя диаметрально противоположными точками кольцевого реостата АВ.
Так, например, в положении, изображенном на фиг. 4, контакты +1 и -2 соединены электрически с диаметрально противоположными точками 4 и 4′ кольцевого реостата АВ. В точках α, β и γ кольцевой реостат АВ разделен на три равные части, при чем от этих точек ответвляются три провода αα, ββ и γγ, к которым присоединены обмотки трех электромагнитов а, в, г, соединенных звездой (фиг. 3).
Электромагнитный якорь S устанавливается параллельно полю, создаваемому электромагнитами. Таким образом, при вращении винта YY шайба L вместе с укрепленными на ней контактами 1, 2, 3 движется вдоль неподвижных контактов I-I′ и II-II′ и, так как контакты +1 и -2,. соединенные с источником постоянного тока, все время касаются двух диаметрально противоположных точек кольцевого реостата АВ, то движение контактов 1 и 2 вдоль неподвижных контактов I-I′ и II-II′ равносильно, как и было указано на фиг. 1, вращению контактов α и β по реостату 1, 2, 3. При этом происходит вращение магнитного поля электромагнитов а, в, г. Якорь S - вращается синхронно с магнитным полем а, в, г.
Пусть зависимость между оборотами у вала YY и оборотами х якоря S выражается кривой x=ƒ(y) (фиг. 4). Вначале участка I-II пути шайбы L контакты 1 и 2 соединены электрически с взаимна, диаметрально противоположными точками 1 и 1′ кольцевого реостата АВ, при чем контакт +1 соединен с точкой 1 и контакт -2 соединен с точкой 1′. Когда шайба L пройдет участок I-II, контакты +1 и -2 опять будут соединены электрически с теми же точками 1 и 1′, но контакт +1 соединен с точкой 1′ и контакт -2 соединен с точкой 1. Таким образом, за время прохождения шайбою L пути I-II якорь S совершает пол-оборота (или на диаграмме фиг. 5 он проходит путь I′-II′=180°).
Далее (см. фиг. 5), при прохождении шайбой L пути II-III, якорь S совершает пол-оборота и проходит путь II′-III′. При прохождении шайбой L пути III-IV якорь S совершает еще пол-оборота и проходит путь III′-IV′.
Так как (как это видно из фиг. 4) отрезки пути шайбы L I-II, II-III, III-IV, IV-V, каждый из которых соответствует полуобороту якоря S, не равны между собою, то ясно, что кривая передачи может, представлять из себя зависимость любого вида; х=ƒ(у).
В случае, если при вращении якоря S вокруг оси 0 (фиг. 3), он преодолевает значительное сопротивление, то якорь S используется лишь как пусковое реле, при чем движение к колесу а (концентричному с якорем S, которое должно совершать повороты х) передается от электромотора М. На фиг. 3 М - электромотор, k- -червячная передача, б-а - зубчатая передача. Неподвижно к якорю S прикреплен рычаг V0, на конце которого помещен контакт q, соединенный с (-) источника постоянного тока. Неподвижно с зубчатым колесом а соединен сектор CD с контактными поверхностями klm k′′m′ пускового реостата
-червячная передача, б-а - зубчатая передача. Неподвижно к якорю S прикреплен рычаг V0, на конце которого помещен контакт q, соединенный с (-) источника постоянного тока. Неподвижно с зубчатым колесом а соединен сектор CD с контактными поверхностями klm k′′m′ пускового реостата  и
и  между которыми помещен изолирующий промежуток W0. Если контакт q рычага V0 находится на изолирующем промежутке, то электромотор М неподвижен (при этом поворот колеса а равен повороту якоря S). В случае, если контакт q рычага V0 касается одного из контактов km, ток проходит по проводу m-u в неподвижный контакт u1 и через пластинку ψ проходит в возбуждающую обмотку гI сервомотора М, одна щетка которого соединена с плюсом.
между которыми помещен изолирующий промежуток W0. Если контакт q рычага V0 находится на изолирующем промежутке, то электромотор М неподвижен (при этом поворот колеса а равен повороту якоря S). В случае, если контакт q рычага V0 касается одного из контактов km, ток проходит по проводу m-u в неподвижный контакт u1 и через пластинку ψ проходит в возбуждающую обмотку гI сервомотора М, одна щетка которого соединена с плюсом.
Сервомотор М, придя в движение посредством червячной передачи k и зубчатой передачи б-а, устанавливает изолирующий промежуток W0 на секторе CD против контакта q на рычаге V0, после чего движение сервомотора М останавливается. Если контакт q на рычаге V0 касается одного: из контактов k′′m′, то ток поступает в обмотку гII электромотора (витки которой намотаны противоположно виткам обмотки г1)и электромотор М, вращаясь в противоположную сторону, стремится посредством передач k- и б-а установить контакт на рычаге V0 против изолирующего промежутка W0, после чего движение сервомотора прекращается.
Пусковые реостаты  и предназначены для регулирования скорости электромотора М. При малой скорости вращения винта YY и соответственно якоря S, контакт q рычага V0 касается лишь контактов K или K′, при чем сервомотор М имеет минимальную скорость. При больших скоростях вала YY контакт q касается контактов или ′ и, наконец, при максимальной скорости, он касается контактов m или m′.
и предназначены для регулирования скорости электромотора М. При малой скорости вращения винта YY и соответственно якоря S, контакт q рычага V0 касается лишь контактов K или K′, при чем сервомотор М имеет минимальную скорость. При больших скоростях вала YY контакт q касается контактов или ′ и, наконец, при максимальной скорости, он касается контактов m или m′.
Обмотки nI и nII на индукторах электромагнитов, один конец которых. соединен с минусом источника постоянного тока, с витками, намотанными противоположно виткам обмоток ГI и ГII, введены для уменьшения искрообразования на контактах сектора CD. Для целей правильной первоначальной установки колеса а соответственно начальному положению винта YY и для контроля движения якоря S применено приспособление, состоящее из винтовой шайбы L (фиг. 2), на которой вместе с контактами +1 и - 2 укреплен контакт - 3, скользящий вдоль реостата qq1. На оси зубчатого колеса насажен рычаг с контактом - 4 (фиг. 3), скользящий по реостату 
На фиг. 5 изображено реле, состоящее из неподвижного электромагнита N-S, возбуждаемого обмоткой hh, между полюсами которого вращается железный якорь L. В пазах якоря L расположены четыре обмотки qq-q1q1, pp-p1p1, внутренние концы которых все соединены.в одной точке, соединенной с полюсом источника постоянного тока. Внешние концы этих четырех обмоток соединены с концами реостатов qq1 и pp1. Неподвижно с якорем L соединен рычаг 3, оттягиваемый в разные стороны двумя пружинами S-S. Конец рычага 3 соединен с источником постоянного тока и помещен между двумя неподвижными контактами ж и ж. В случае, если положение контактов - 3 на реостате qq1 к - 4 на реостате pp таково, что сопротивления участков 3-q равны сопротивлению участка 4-р, тогда сила тока в линии qq равняется силе тока в линии рр и сила тока в линии q1q1 равняется силе тока в линии p1p1.
Как видно из рассмотрения фиг. 5, обмотки рр и qq намотаны на якорь L взаимно противоположно. Обмотки p1p1 и q1q1 также намотаны взаимно противоположно. Таким образом, в случае, если контакты 3 и 4 (фиг. 3, 4) занимают одинаковое положение на реостатах qq1 и рр1 то крутящий момент якоря L (реле на фиг. 5) равен 0 и рычаг 3 не касается контактов ж и ж. При этом сумма ампер-витков четырех цепей якоря равна 0. Если же положение контактов 3 и 4 на реостатах qq1 и рр1, не одинаково, то сумма ампер-витков в четырех цепях якоря L не равна 0 и якорь L имеет стремление повернуться в ту или иную сторону. При этом рычаг 3 будет прижат к одному из неподвижных контактов ж.
Ток из рычага 3 (фиг. 5), соединенного с зажимом, пройдет в один из неподвижных контактов ж и далее: к одному из неподвижных контактов W у реле R (фиг. 3), в обмотку реле R и в сигнальное приспособление K. При этом пластинка ψ, соединенная с сердечником реле R, прижмется к контактам W, благодаря чему ток пройдет в соответствующую индукторную обмотку сервомотора М и последний будет, вращаться в таком направлении, чтобы установить рычаг 4 в положение, идентичное положению рычага 3 на фиг. 4. После того, как сервомотор М приведет рычаг 4 в положение, идентичное рычагу 3, якорь L реле на фиг. 5 поставит рычаг 3 в среднее положение, ток из обмотки реле R на фиг. 3 выключается, и пластинка ψ упадет на контакты u.
В дальнейшем работою электромотора М управляет рычаг V0 (фиг. 3) с контактом q, скользящим по сектору CD. Таким образом, при первоначальной установке или при неправильном положении якоря S включается реле R - и управление сервомотором M производится посредством реле L и реостатов qq1 и pp1. После того, как колесо a будет приведено (со степенью точности соответствующей передаче посредством системы реостатов qq1 и pp1) в правильное положение, рычаг 3 у реле на фиг. 5 устанавливается в среднем между контактами ж положении, реле R выключается и дальнейшая, более точная установка осуществляется посредством системы кольцевого реостата АВ и якоря S. Так как при конструировании передачи, может быть установлено произвольное число оборотов якоря S, соответствующее полному пути шайбы L, то степень точности передачи может быть сделана также произвольною.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическая телефонная станция | 1926 |
|
SU7045A1 |
| АППАРАТ ДЛЯ ЭЛЕКТРИЧЕСКОЙ ТЕЛЕСКОПИИ | 1926 |
|
SU7937A1 |
| АВТОМАТИЧЕСКАЯ ТЕЛЕФОННАЯ СТАНЦИЯ | 1927 |
|
SU18463A1 |
| Устройство для электрического освещения железнодорожных поездов | 1926 |
|
SU4894A1 |
| Автоматический вагонный замедлитель | 1932 |
|
SU35230A1 |
| АВТОМАТИЧЕСКАЯ ТЕЛЕФОННАЯ СТАНЦИЯ | 1927 |
|
SU7157A1 |
| Устройство для поддерживания синхронизма двух удаленных друг от друга вращающихся механизмов | 1925 |
|
SU2756A1 |
| БУКВОПЕЧАТАЮЩИЙ ТЕЛЕГРАФНЫЙ АППАРАТ | 1921 |
|
SU7177A1 |
| АСИНХРОННЫЙ АВТОМАТИЧЕСКИЙ БУКВОПЕЧАТАЮЩИЙ ТЕЛЕГРАФНЫЙ АППАРАТ | 1923 |
|
SU3560A1 |
| Автоматический регулятор | 1937 |
|
SU58790A1 |

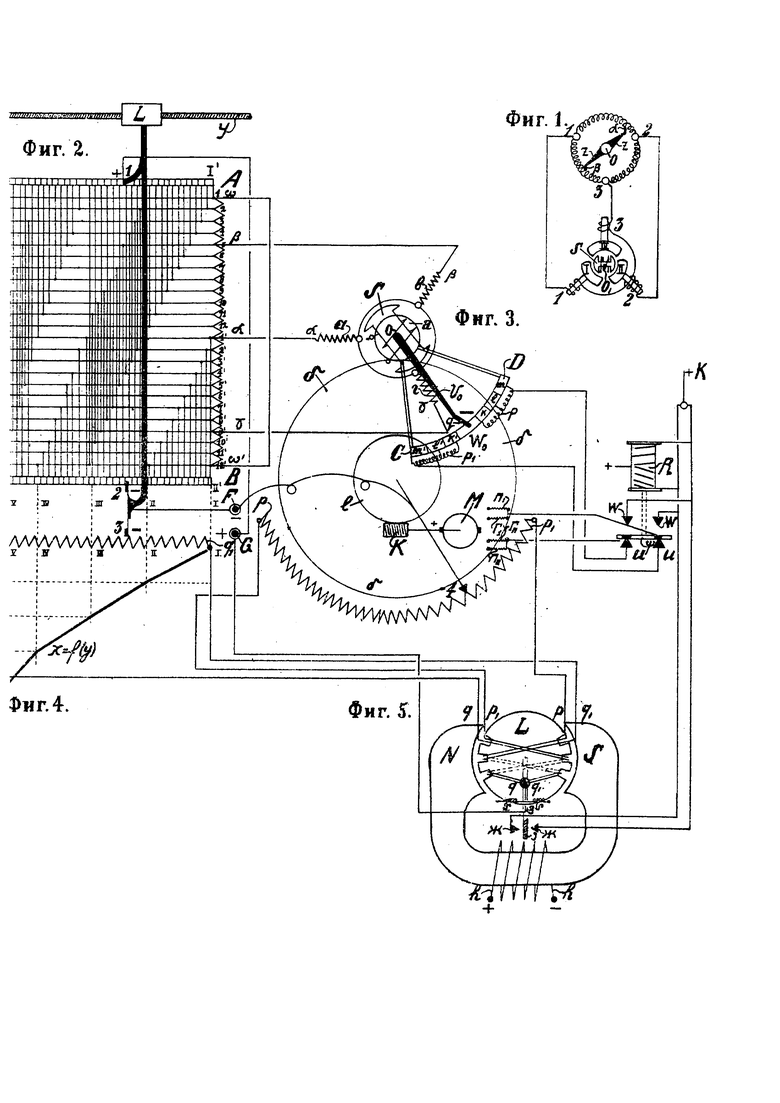
1. Устройство для электрической асинхронной передачи поворотов вала на расстояние, характеризующееся применением: а) электромагнита, состоящего из вращаемого вместе с ведомым валом вокруг оси 0 железного якоря S под действием расположенных вокруг электромагнита под углом в 120° трех катушек а, в, г, создающих при прохождении по ним трех токов переменной по времени силы - магнитное поле с переменным по положению направлением действия; б) реостата с замкнутым на себя сопротивлением АВ с двумя рядами контактов I-I′ и II-II′, соединенных с отдельными секциями 1, 2, 3, 4…12 и 1′, 2′, 3′, 4′…12′ этого сопротивления таким образом, чтобы, во-первых, при перемещении муфты L по винтовому ведущему валу Y-Y, связанные с нею механически и соединенные с зажимами + и - источника постоянного тока, щетки 1 и 2, при каждом их положении разбивали сопротивление АВ на две равные части, с той целью, чтобы от зажимов α, β, γ, делящих то же сопротивление на три равные части, к обмоткам электромагнита ведомого вала а, в, г отходили токи, наибольшие значения которых должны отличаться по времени на равные интервалы, а во-вторых, число контактов, проходимых щетками 1 и 2 в одинаковые промежутка времени, менялось соответственно установленной заранее зависимости между числом оборотов винтового ведущего вала Y-Y и числом оборотов ведомого вала якоря электромагнита S (фиг. 2 и 3).
2. Видоизменение охарактеризованного в п. 1 устройства, отличающееся тем, что якорь S электромагнита свободно сидит на своем валу, а на последнем заклинена зубчатка a, приводимая во вращение, при посредстве зубчаток б и , и червяка K, сериес-двигателем постоянного тока М, число оборотов и направление вращения которого меняется помощью сдвоенного реостата CD, жестко механически связанного с валом зубчатки а, и контактного рычага Vo, жестко связанного с якорем S электромагнита и соединенного с одним зажимом источника постоянного тока, другой зажим которого подводится непосредственно к двигателю М (фиг. 3 и 2).
3. При охарактеризованном в п. 2 устройстве применение реле L, предназначенного, вместе с реостатами q-q1 и р-p1, для регулирования точности установки зубчатки, а также для контроля движения якоря S электромагнита, каковое реле состоит из электромагнита NS с якорем L, несущим дифференциальные обмотки p-p1 и q-q1, назначенные действовать на якорь L и, при расхождении положений щетки 3 на реостате q-q1 и щетки 4 на реостате р-р1 из коих щетка 3 связана с муфтою L, а щетка 4 связана с зубчаткою б - поворачивать якорь L и, посредством контактов ж-ж электромагнита R и контактов W-W включать двигатель М, устанавливающий правильное положение колеса б (фиг. 5).
