Активно-пассивные упражнения на аппаратах Каро, получивших большое распространение за последнее время, не удовлетворяют в достаточной мере всем лечебным требованиям. На этих аппаратах получаются удовлетворительные результаты лишь при развитии пассивных движений в суставах. Результаты активных упражнений для мышц получаются недостаточными. Укрепление и развитие мускулатуры идет чрезвычайно медленно и в конечном результате не дает восстановления трудо- и работоспособности в достижимых максимальных пределах. Конструкция предлагаемого механотерапевтического штатива для развития активно-пассивных движений отличается от маятниковых аппаратов (minima-pendel) Каро тем, что, кроме маятника, обеспечивающего плавность движений, введено дополнительное сопротивление добавочным грузом.
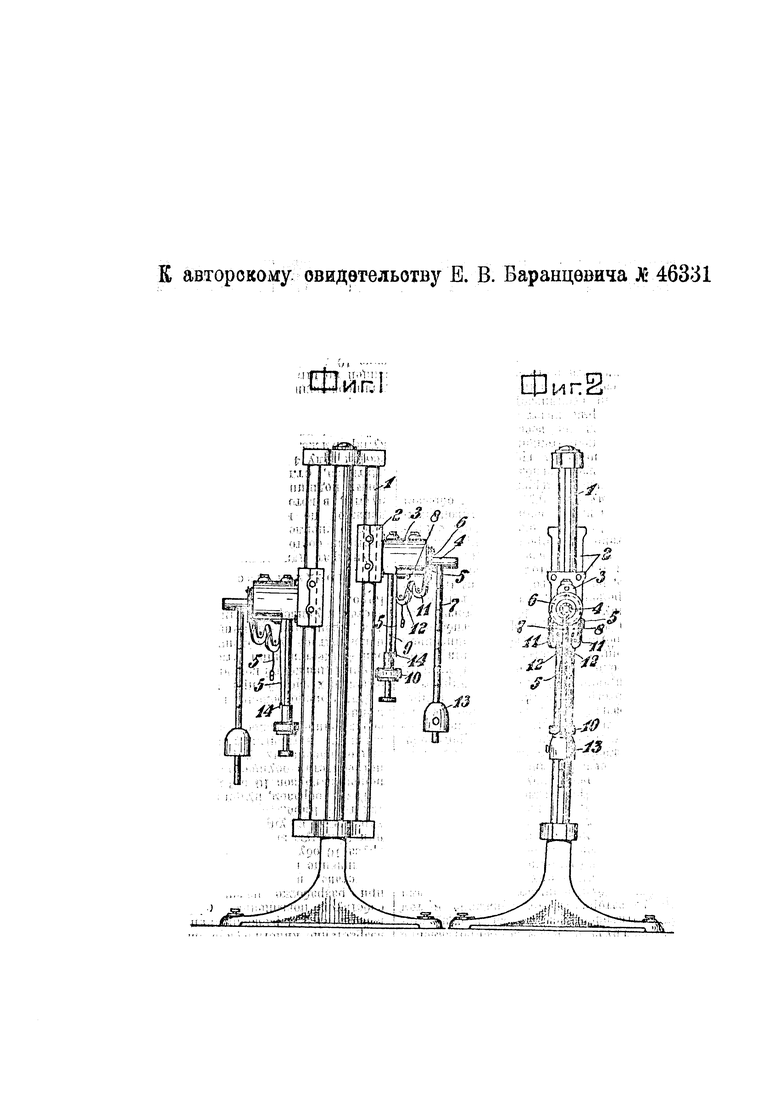
На чертеже фиг. 1 изображает общий вид аппарата и фиг. 2 - вид аппарата сбоку.
Аппарат по виду напоминает аппарат Каро и состоит из штативной центральной колонки и двух параллельных пластин 1 плоского железа, закрепленных на общей металлической подставке Лапе; на пластинах 1 при помощи болтов крепится на желаемом уровне муфта 2 вместе с неподвижно с ней свинченной частью 3. Внутри части 3 на шариковых подшипниках проходит ось (вал) 4 маятника, к которой прикреплено плечо 7 маятника с грузом 13. Этот груз 13, как и в аппаратах Каро, может быть применен любой нагрузкой и на любой высоте плеча 7.
Кроме этого маятника, использованного к в аппаратах Каро, имеется на той же части 3 дополнительное сопротивление грузом, технически оформленное следующим образом. На оси 4 укреплен шкив 6 с желобком по периметру и с отверстиями в верхней части его для крепления двух ремешков 5 (или троса). Это ремешки 5 облегают шкив по жолобу с обеих сторон, перекидываются через добавочные парные блоки 11 и 12 и заканчиваются крючками, при помощи которых могут пристегиваться к крючку добавочной муфты 14, свободно скользящей по круглой штанге 9, неподвижно закрепленной верхним концом в части 3 снизу. На эту муфту 14 с крючком по мере надобности накладывается добавочный груз 10 или несколько таких грузов, в зависимости от потребности увеличить добавочное сопротивление. При раскачивании маятника поворачивается закрепленный на его оси шкив 6, который тянет один из ремешков 5 и за колечко, пристегнутое к крючку, подтягивает муфту 14 с грузом 10 по штанге 9 вверх. При этом второй ремешок 5 остается свободным (фиг. 1).
Вес груза 10 оказывает сопротивление при отклонении маятника в одну сторону, затормаживает движение и тем самым обусловливает нагрузку для мышц, вызывающих движение в этом направлении (например, сгибателей), чем и достигается изолированная тренировка лишь тех мышечных групп, которые силой своих сокращений вызвали это движение (т.е. на данном примере сгибание). При отклонении маятника в другую сторону груз 10 своей тяжестью облегчает движение маятника; сопротивление системы при этом выключается, и мышечные группы, противоположные упражняемым (на данном примере разгибатели), вследствие исключения этого сопротивления не напрягаются и, таким образом, не тренируются. При необходимости упражнять мышцы, вызывающие активные движения в сторону, противоположную вышеописанной (т.е. на данном примере разгибатели), к крючку муфты 14 пристегивается второй ремешок 5, идущий от того же шкива 6, но с другой стороны (первый ремешок 5 при этом должен быть отстегнут и оставаться свободным). При этой установке, в процессе упражнений, грузом 10 будет оказываться сопротивление в направлении, противоположном первому примеру, и таким образом будут сильнее нагружаться и мышцы (в этом случае разгибатели).
Увеличение веса груза 10 путем наложения дополнительных гирь, как это практикуется на весах типа Фербенкс и т.п., затормаживает качание маятника по инерции (усиливает сопротивление) и тем самым увеличивает нагрузку мышц при активном сокращении и способствует более энергичной тренировке. Это увеличение сопротивления, обусловленное добавочным грузом, стоит в зависимости от веса груза 13 на маятнике и расстояния его от оси качания. Чем меньше груз 13 и чем ближе он закреплен на плече 7 к оси 4, тем меньше инерция, развиваемая при качании, следовательно, больше нагрузка и тренировка мышц, т.е. повышение их работоспособности. Увеличение груза 13, удаление его по плечу 7 от оси 4 при увеличении груза 10 обусловливает возрастание кинетической энергии (живой силы) при раскачивании и тем способствует повышению эффективности при разработке пассивных движений' в суставе, в случае ограничения их. Увеличение груза 13 при уменьшении груза 10 обусловливает при раскачивании большую энергию и приближает по характеру к упражнениям на аппаратах типа Каро.
Таким образом, путем изменения соотношения грузов 10 и 13 может быть по. потребностям осуществлен мягкий переход от пассивных упражнений к упражнениям активным с нагрузкой, при соблюдении плавности и мягкости движений.
Для приспособления к этому штативу отдельных частей при разработке различных движений конечностей на конце оси 4 имеется шип стандартного типа и квадратное углубление на головке 3 для крепления выпущенных в СССР частей к универсальным аппаратам типа Каро.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ РЕАБИЛИТАЦИИ НАРУШЕННОЙ ФУНКЦИИ РАЗГИБАНИЯ СТОПЫ | 2011 |
|
RU2457817C1 |
| Устройство для реабилитации пальцев кисти | 2018 |
|
RU2694174C1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ ВЕРТИКАЛЬНОЙ ПОЗЫ У БОЛЬНЫХ С НАРУШЕНИЕМ ПРОВОДИМОСТИ ПО СПИННОМУ МОЗГУ ПО НОВОСЕЛОВУ А.Г. | 2008 |
|
RU2389466C1 |
| СПОСОБ ВОССТАНОВИТЕЛЬНОГО ЛЕЧЕНИЯ ПАЦИЕНТОВ С ПОЗВОНОЧНО-СПИННОМОЗГОВОЙ ТРАВМОЙ | 2013 |
|
RU2539164C1 |
| Устройство для тренировки мышечной системы спортсменов | 1989 |
|
SU1655523A1 |
| СПОСОБ ТРЕНИРОВКИ МЫШЦ | 2016 |
|
RU2620146C1 |
| СПОСОБ КОРРЕКЦИИ ОСАНКИ | 2015 |
|
RU2598757C1 |
| Способ реабилитации больных с переломами дистального метаэпифиза костей предплечья | 1987 |
|
SU1498494A1 |
| СПОСОБ ОПТИМИЗАЦИИ БАЛАНСА МЫШЦ НИЖНИХ КОНЕЧНОСТЕЙ СПОРТСМЕНОВ С ПОМОЩЬЮ РОБОТИЗИРОВАННОЙ МЕХАНОТЕРАПИИ | 2023 |
|
RU2804185C1 |
| ГИМНАСТИЧЕСКОЕ УСТРОЙСТВО И СПОСОБЫ ЕГО ИСПОЛЬЗОВАНИЯ ДЛЯ ТРЕНИРОВКИ И (ИЛИ) ВОССТАНОВЛЕНИЯ РАБОТОСПОСОБНОСТИ МЫШЦ И СУСТАВОВ ЧЕЛОВЕЧЕСКОГО ТЕЛА | 2003 |
|
RU2326709C2 |
Аппарат для активно-пассивной гимнастики, состоящий из колонки, двух жестко сцепленных с ней пластин и подвижной по каждой из этих пластин муфты, в которой расположен на шариковых подшипниках вал несущего груз маятника, отличающийся тем, что на осевом валу 4 укреплен шкив 6 с циркулярным желобком и отверстиями в верхней части для укрепления тросов, облегающих шкив, проходящих через блоки 11, 12 и заканчивающихся крючками для поочередного их сцепления со скользящей по штанге 9 муфтой 14, несущей груз 10 для увеличения сопротивления при отклонении маятника в одну сторону, с целью большой нагрузки на соответствующие группы мышц.
