1
f Изобретение относится к области измерения угловых перемещений.
Известен дискретный датчик угла поворота, содержащий дисковый ротор, на котором размещены управляющие элементы, и дисковый статор, на котором по окружности расположены магнитоуправляемые контакты, подключенные через коммутатор и обмотки реле к источнику питания, причем управляющие элементы ротора выполнены в виде полукольцевого пакета из постоянных магнигтов, расположенных радиально и соединенных между собой одноименными полюсами.
Однако этот датчик имеет невысокую точность, и им невозможно осупюствлять контроль многооборотных перемещений.
Предлагаемый датчик отличается от известных тем, что статор выполнен в виде стакана, внутри которого аксиально укреплен ходовой винт, а на внутренней боковой поверхности по винтовой линии установлены герконы, ротор выполнен в виде цилиндрической ходовой гайки, составлшющей вместе (С ходовым винтом винтовую пару и имею- щей на внешней боковой поверхности винтооб разную канавку, в которой размещен постоян- ный магнит, причем ходовая гайка неподвижно укреплена внутри стаканообрааной крышки, которая надета на статор со стороны его открытого торца и кинематически связана с объектом, перемещение которого контролируется, при этом направление и щаг витков винтовой пары, винтообра ных канавки и линии расположения герконов приняты одинаковыми.
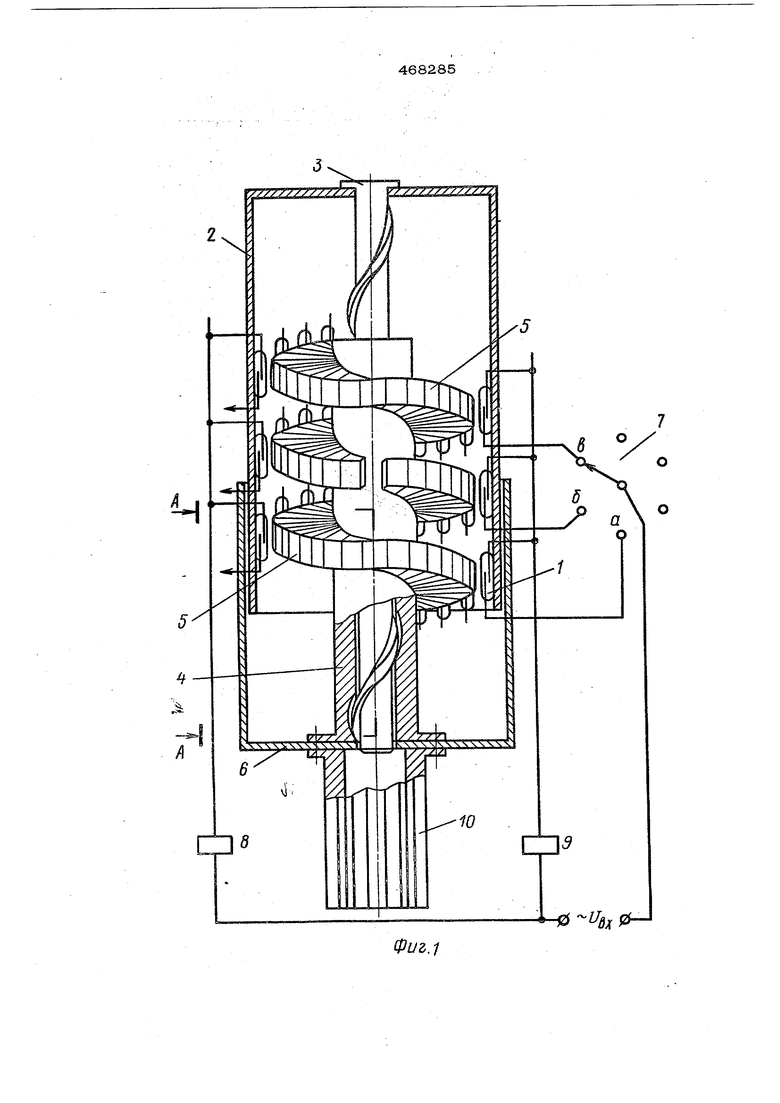
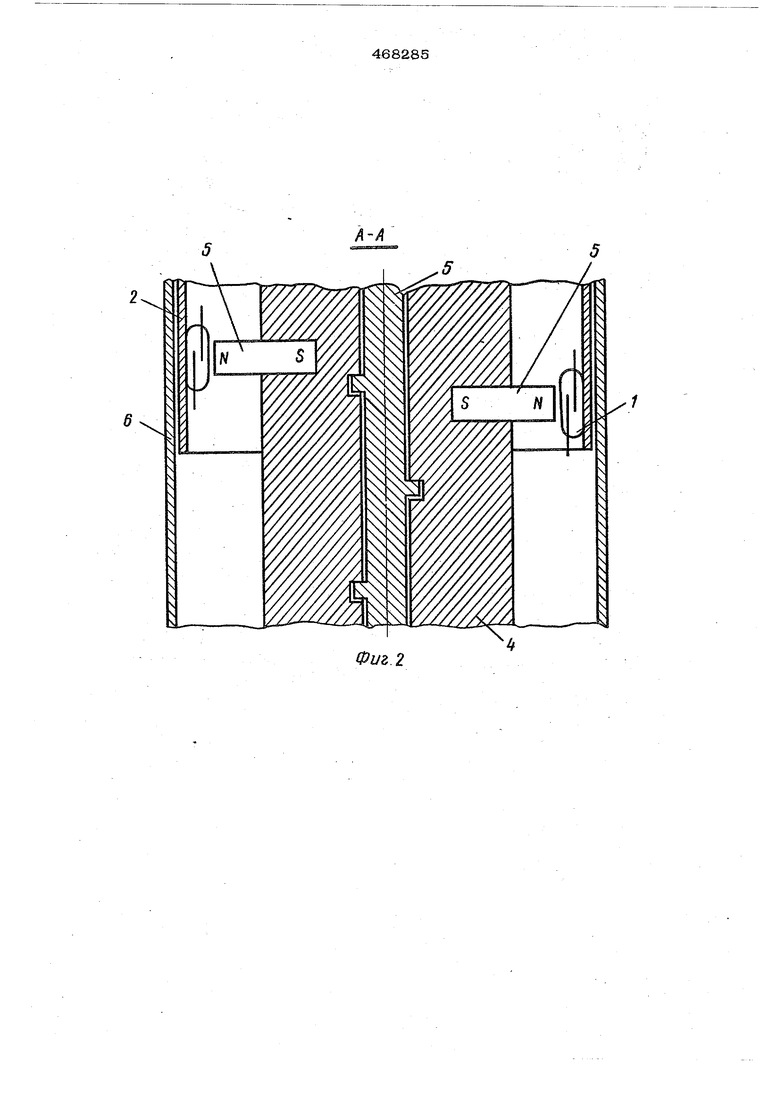
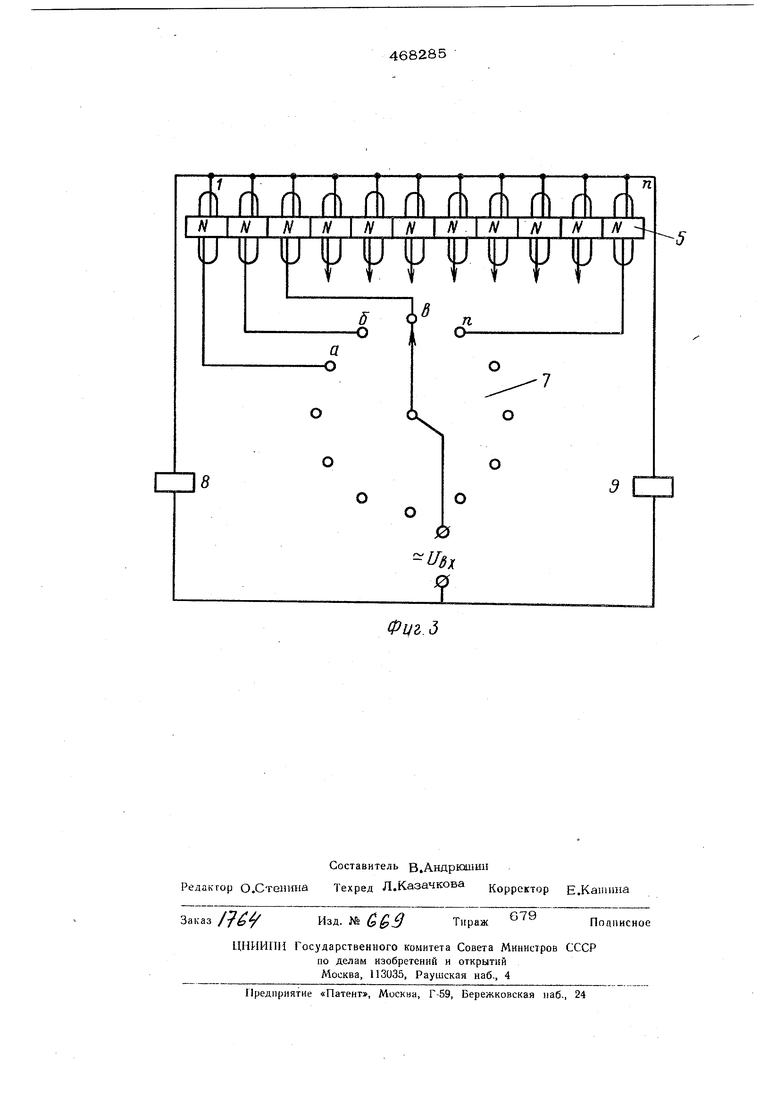
На фиг. 1 показан общий вид предлагаемого датчика; на фиг. 2 - разрез по А-А на фиг. 1; на фиг. - принципиальная электрическая схема предлагаемого датчика.
Предлагаемый датчик угловыхперемещений включает в себя статор, ротор, коммутирующее устройство и исполнительное реле.
Статор содержит магнитоуправляемые контакты (герконы) 1, корпус 2 и ходовой винт 3. Ротор содержит ходовую айку 4, постоянный магнит 5 и крыщку 6. Коммутирующее устройство состоит из коммутатора 7, исполнительных реле 8 Корпус 2 вьшолнен в виде стакана, в котором жестко закреплен один конец хо дового винта 3 (например так, как показано на фиг. 1). Другой конец ходового винта 3 помещается в отверстии стаканорбразной крышки 6/которая надета на корпус 2 со стороны его открытого торца I Внутри крышки 6 аксиально укреплена гай ка 4, которая вместе с винтом 3 составляет винтовую пару. Крышка 6 при помо; щи шлицевой муфты Ю кинематически свя зана с объектом, перемещение которого контролируется (на чертеже не показан). С целью упрощения конструкции и повыше ния надежности ходовая гайка 4 может быть выполнена за одно целое с крьпикой Герконы 1 равномерно установлены по винтовой линии на внутренней боковой поверхности цилиндрического корпуса 2 напротив полюсов постоянного магнита S та что оси их параллельны образующей цилиндра. Постоянный магнит 5 представляет собой пакет единичных постояиных маг нитов, соединенных между собой одноиме ными полюсами и помещенных в винтообразную канавку, выполненную на внешней боковой поверхности ходовой гайки 4. Корпус 2 изготавливается из немагнит ного материала (например, из дюралюминия). Направление и шаг витков винтовой пары, винтообразной канавки, в которой размещается постоянный магнит 5, ивин- товсй линии, по которой располагаются герконы 1, принимаются одинаковыми.. С целью достижения реверсивности действия герконы 1 разделены на две группы Один из выводов герконов в каждой группе подкгаочен к обшей точке, а другой - К соответствующему зажиму коммутатора 7. Между общей точкой герконов и одним из зажимов питающего напряжениям / в каждой группе включено электромагнитное реле, соответственно 8 и 9. Очевидно, что в пределе, когда шаг винтовой пары, винтообразных канавки и линии расположения герконов равен бесконечности (с), движение ротора становится прямолинейно-поступательным. Поэтому для упрощения чертежа и облегчения уяснения принципа действия предлагаемого датчика, его принципиальная электрическая схема (см. фиг. З) приведена для случая, когда f оо Предлагаемый датчик угловых перемещений работает следующим образом. Контакты герконоБ 1, расположенные ; напротив постоянного магнита 5, находятся ; в замкнутом положении, а расположенные в воздушном зазоре - в разомкнутом noil ложении. Приустановке подвижнрго; кон- Ь такта коммутатора 7 , например, в поло- :; жении в, подается напряжение питания на соответствующийгеркон 1. При ВХ ,f : этом срабатывает реле 8, которое своим замыкающим контактом включает приводной двигатель контролируемого объекта. При перемещении объекта ротор датчика поворачивается (например, по часовой стрелке) на угол, пропорциональный величи не этого перемещения. Движение объекта совершается до тех пор, пока геркон 1 не окажется в воздушном, зазоре. При этом iгеркон 1 разомкнется. В результате реле 8i (Обесточивается, и питание с приводного двигателя снимается. Движение объекта ввиду полной отработки заданного перемещения прекращается. Предлагаемый датчик обладает точностью, чем подобные известные датчи-: ки, поскольку цена деления в нем (шаг дист кретности) при одной и той же разрешающей .способности может быть выбрана большей, ; т , е. герк;оны могут быть расположены на больщем удалении друг от друга. Это облегчает настройку датчика. Предмет изобретения ; Датчик угловых перемещений, содержа- : щий ротор с расположенными на нем по стоянными магнитами, статор, герконы, установленные на статоре и подключенные через коммутатор и обмотки реле к источнику питания, отличающийся |тем, что, с целью повышения точности и расширения диапазона измерения, статор выполнен в виде стакана, внутри jtoTOpoi o установлены аксиально-ходовой винт, а на ; боковой поверхности по винтовой линии магнитоуправляемые контакты, ротор вы:полнен в виде укрепленной в крышке ста:тора, расположенной в его открытом конце, цилиндрической ходовой гайки с винтообразной канавкой на внешней боковой ее по верхности, в которой размещены по.-тоянные магниты, причем цилиндрическая ходовая гайка образует с винтом винтовую ; пару.
Фиг.-}
Фиг,. 2
rli fi rli rt rii Д, rli rl) ft), rl), ri
/V N IN H N /I я N N f/ IV -j.
V |J V VT IP V
и I j u
В
ff
n
| название | год | авторы | номер документа |
|---|---|---|---|
| Переключатель | 1978 |
|
SU817782A1 |
| Командоаппарат | 1978 |
|
SU780068A1 |
| Устройство для выверки опорных плит безвыверчно монтируемых колонн здания | 1972 |
|
SU553341A1 |
| Переключатель | 1979 |
|
SU838812A1 |
| Устройство для массового изготовления герконов с азотированными контактными площадками | 2022 |
|
RU2795947C1 |
| ПРОМЫШЛЕННЫЙ ЭЛЕКТРОННЫЙ ДЖОЙСТИК С БЕСКОНТАКТНЫМ ДАТЧИКОМ | 2024 |
|
RU2827681C1 |
| РЕЛЕ ДАВЛЕНИЯ | 2000 |
|
RU2169913C1 |
| ПНЕВМАТИЧЕСКИЙ ПРИВОД, СТРУЙНЫЙ ДВИГАТЕЛЬ (ВАРИАНТЫ) И ЭЛЕКТРОПНЕВМАТИЧЕСКОЕ УПРАВЛЯЮЩЕЕ УСТРОЙСТВО | 2001 |
|
RU2178842C1 |
| ЭЛЕКТРОМАГНИТНЫЙ ПЕРЕКЛЮЧАТЕЛЬ | 2005 |
|
RU2307419C2 |
| Поворотный переключатель | 1987 |
|
SU1432628A1 |
Ч
Фиг.д
