Изобретение относится к устройствам дистанционного управления, а именно к электронным модулям, принцип действия которых основан на формировании пропорционального электрического аналогового или цифрового управляющего сигнала, в частности к джойстикам с бесконтактным преобразованием механического движения их рукоятки в управляющий электрический сигнал, соответствующий её положению, с использованием эффекта Холла, и может быть использовано для точного пропорционального управления перемещением исполнительных механизмов в составе электронных систем управления, например, в пультах дистанционного управления, многофункциональных консолях, стационарных панелях, подлокотниках и блоках управления.
Из существующего уровня техники известен контроллер джойстика с магниточувствительными элементами (патент US 4500867 A, 19.02.1985, G01D5/14; G01D5/16; G05G9/047), состоящий из немагнитного статора, в сферической полости которого установлена шарообразная головка, выполненная из двух полусферических деталей из немагнитного материала, со встроенным рычагом, причём, внутри шарообразной головки закреплен двухполюсный кольцевой постоянный магнит с аксиальной намагниченностью, а на немагнитном статоре в одной плоскости установлены два магнитоуправляемых элемента; при этом для фиксации положения шарообразной головки в нижней части статора установлен пружинный элемент в виде корончатой шайбы.
Из уровня техники также известен джойстик одноосевой пропорциональный (патент RU 2776590 C1, 22.07.2022, G01B7/30, H01H21/00), содержащий основание, рукоятку, соединенную с основанием с возможностью вращательного движения, по меньшей мере, один двухполюсный постоянный магнит, по меньшей мере один магнитоуправляемый сенсор, размещенный неподвижно относительно основания в зоне магнитного поля постоянного магнита, по меньшей мере один пружинный элемент, причём, рукоятка соединена с основанием посредством одноосевого цилиндрического шарнира, причем основание и рукоятка опираются на опорные концы, по меньшей мере, одного пружинного элемента, при этом постоянный магнит выполнен в форме объемного кольцевого сектора с постоянным поперечным сечением, с аксиальной намагниченностью вдоль его боковых поверхностей таким образом, что торцевые поверхности являются магнитными полюсами, при этом постоянный магнит неподвижно связан с рукояткой с возможностью движения, передаваемого от рукоятки, по траектории в виде дуги окружности, центр которой лежит на оси вращения рукоятки, а его вогнутая поверхность обращена к шарниру, при этом движение постоянного магнита обеспечивает изменение положения магнитоуправляемого сенсора в магнитном поле от одного полюса к другому.
Наиболее близким техническим решением является модуль электронного дистанционного управления на сенсорах холла (патент RU 2334267 C2, 20.09.2008, G05G9/053), содержащий сенсоры, неподвижно установленные в корпусе, в сферическую поверхность которого установлена с возможностью поворота шарообразная головка рычага, причём, сенсоры размещены внутри сферы, образующей шарообразную головку, в которой закреплен постоянный магнит.
Основными недостатками вышеописанных технических решений являются сложность конструкции, обусловленная необходимостью совместной ориентации сенсоров, магнитов и направляющей опоры рычага, что может привести к нелинейной характеристике выходного сигнала датчика в зависимости от угла поворота рукоятки, а соответственно, и к искажению определению угла наклона рукоятки, конструктивная необходимость в больших габаритных параметрах корпусных элементов для размещения двух магниточувствительных датчиков и/или двух магнитов, эксплуатационная возможность использования устройств или только по одной из двух координатных осей в плоскости, параллельной верхнему его виду, или без функции фиксации рукоятки джойстика по упомянутым осям с низкой несущей способностью деталей пар трения шаровой опоры рычага.
Техническим результатом заявляемого изобретения является расширение конструктивных, эксплуатационных и компактно-компоновочных возможностей, заключающихся в улучшении и оптимизации рабочих параметров устройства, повышению точности регулирования выходного сигнала, упрощении конструкции, уменьшении габаритных параметров корпусных элементов для размещения магниточувствительного датчика и магнита, реализации функции фиксации рукоятки джойстика по одной из двух координатных осей в плоскости, параллельной верхнему его виду, а также в повышении несущей способности и долговечности.
Указанный технический результат достигается за счет того, что промышленный электронный джойстик с бесконтактным датчиком выполнен с модулем электронного дистанционного управления, в верхней части которого на его рычаге закреплена рукоятка, и соосно его рычагу расположен защитный чехол.
Причём, рычаг модуля электронного дистанционного управления в нижней своей части выполнен со сферической головкой, которая установлена со сферической посадкой в обойме, образованной между корпусом и крышкой и выполненной со штифтом, жёстко закрепленным между ними с одной своей стороны, а с другой - свободно расположенным в пазу сферической головки, и с одним магнитом с аксиальной намагниченностью, закреплённым по центру торца нижней части рычага, а под упомянутой крышкой неподвижно закреплён корпусный модуль электронной печатной платы с одним магниточувствительным датчиком, который выполнен с установкой по центру относительно оси рычага под магнитом.
В частности, корпус модуля электронного дистанционного управления может быть выполнен в форме, реализованной с возможностью двухосевого перемещения рычага с возвратом в центральное положение, или одноосевого перемещения с возвратом в крайнее или центральное положение по координатным осям в плоскости, параллельной верхнему виду устройства, или перемещения рычага по одной из упомянутых двух координатных осей с его фиксацией по другой из координатных осей.
При этом рычаг может содержать ступенчатый выступ, на котором жёстко закреплена возвратная пружина к верхней части рычага.
Кроме этого, рычаг и сферическая головка могут быть выполнены в разъемном исполнении, таким образом, что сферическая головка в верхней своей части содержит глухое резьбовое отверстие, образующее винтовую пару с нижней частью рычага.
Причём, обойма сферической посадки может содержать фрикционные вставки, выполненные с функцией фиксации сферической головки рычага через болтовые соединения с гайками и пружинами, которые выполнены с возможностью регулировки жёсткости фиксации сферической головки через прокладку между корпусом и крышкой с упором в их стопорное отверстие, а корпусный модуль может быть закреплён к крышке посредством винтовых соединений.
При этом модуль электронного дистанционного управления в верхней части может содержать фланец с шайбой, а в нижней части - патрубок, одна сторона которого закреплена к корпусу посредством установочных винтов, а другая - выполнена с заглушкой и проходной кабельной втулкой.
Кроме этого, корпус и крышка могут быть изготовлены из ударопрочного полимерного материала, а рычаг и сферическая головка - из углеродистой стали, легированной стали или цветных металлов.
Причём ударопрочный полимерный материал может быть выполнен в виде капролона, или фторопласта, или полиацеталя, или полиуретана, или текстолита, или стеклотекстолита, или полипропилена, или полистирола, или абс-пластика, или пнд-пластика, или гетинакса.
При этом легированная сталь может быть выполнена в виде коррозионно-стойкой или нержавеющей стали.
Кроме этого, фрикционные вставки могут быть выполнены прямоугольной формы.
Причём защитный чехол может быть выполнен в геометрической форме гофрированного тела вращения.
При этом цветные металлы могут быть выполнены в виде латуни, или бронзы или алюминия.
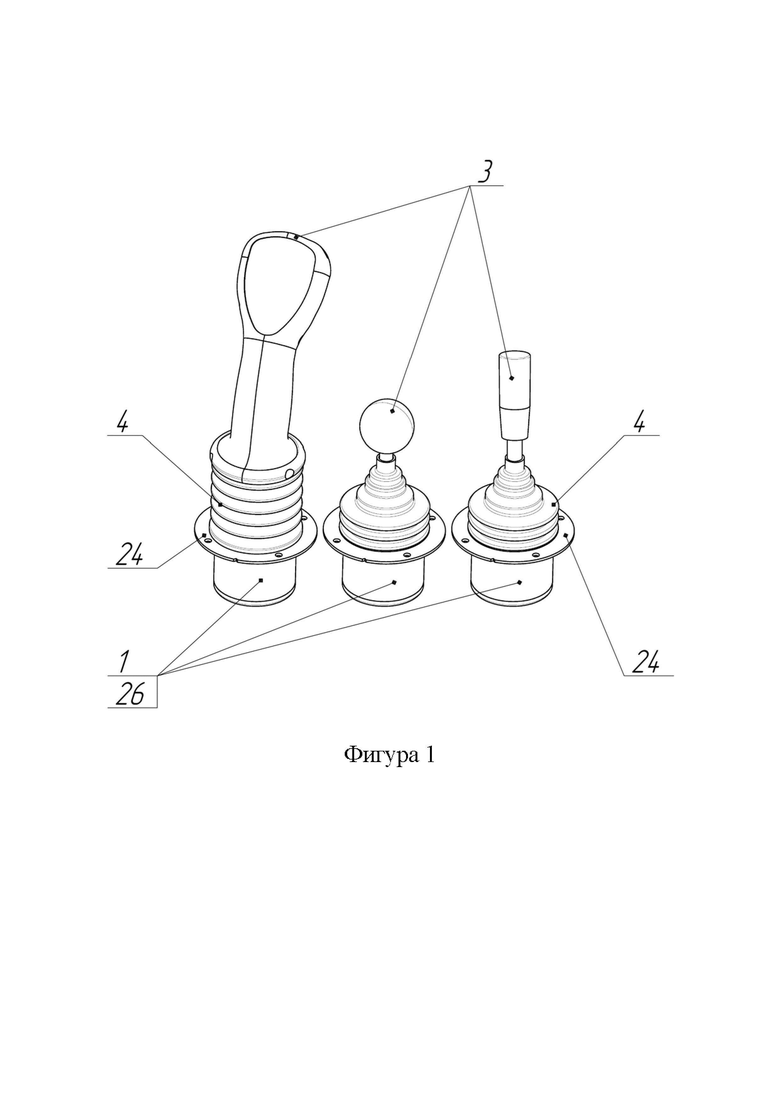
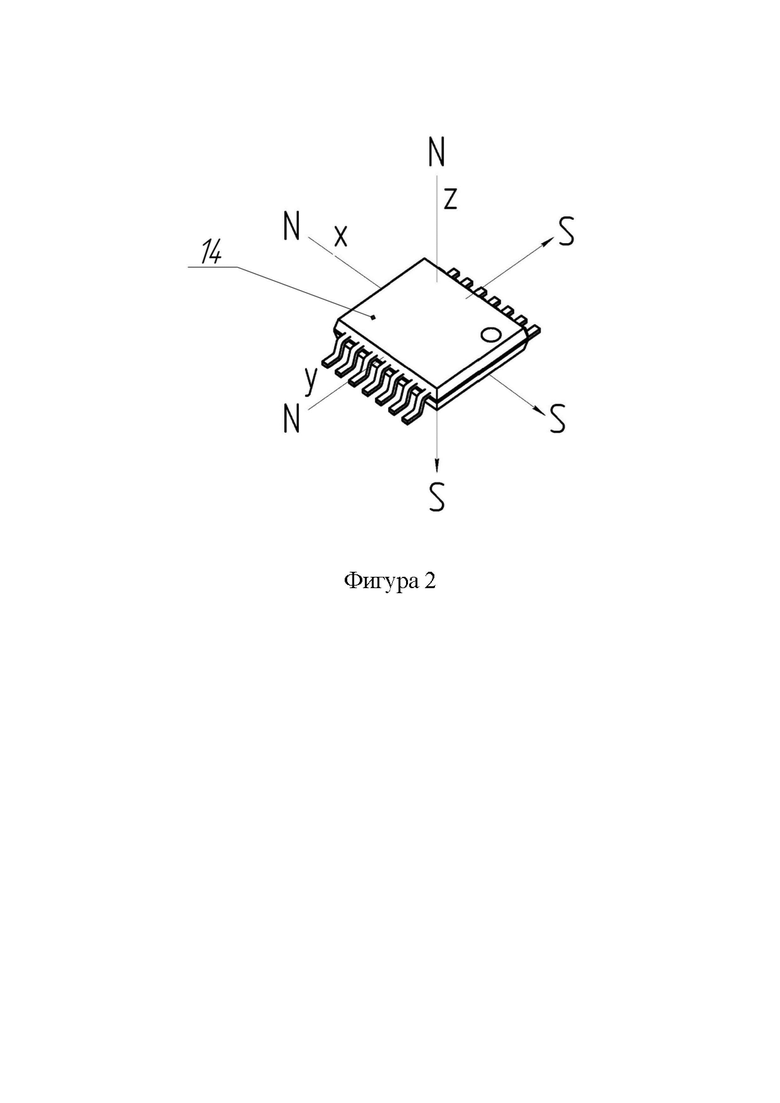
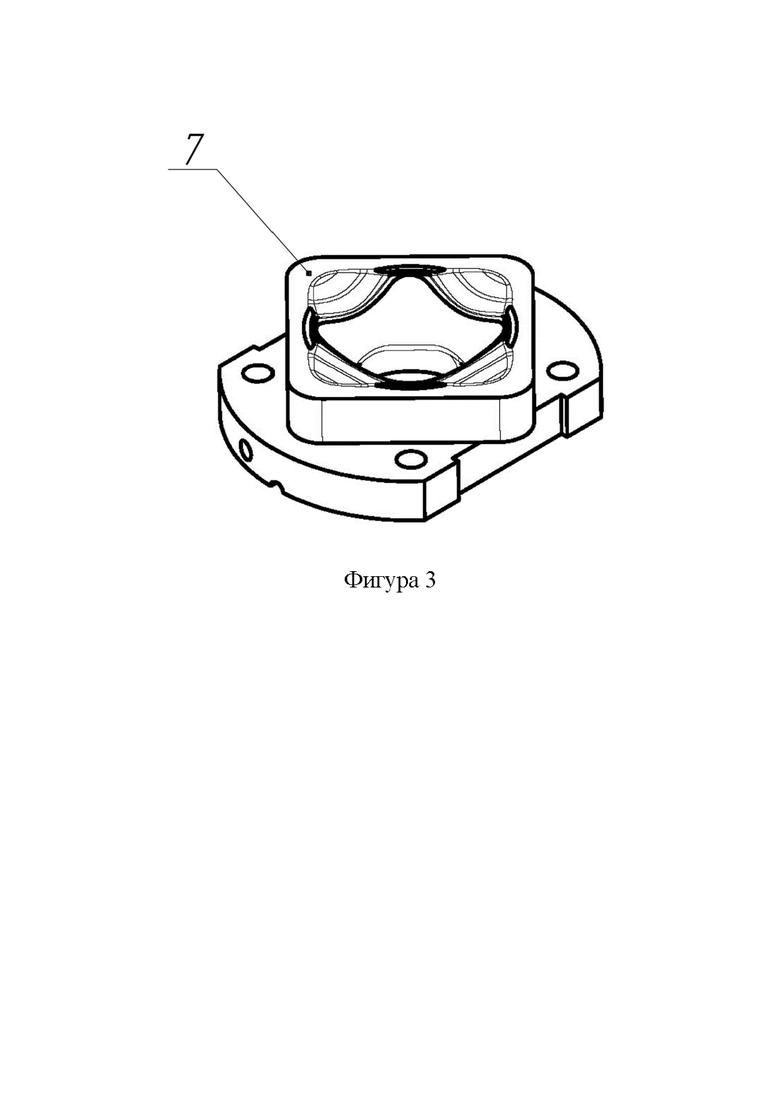
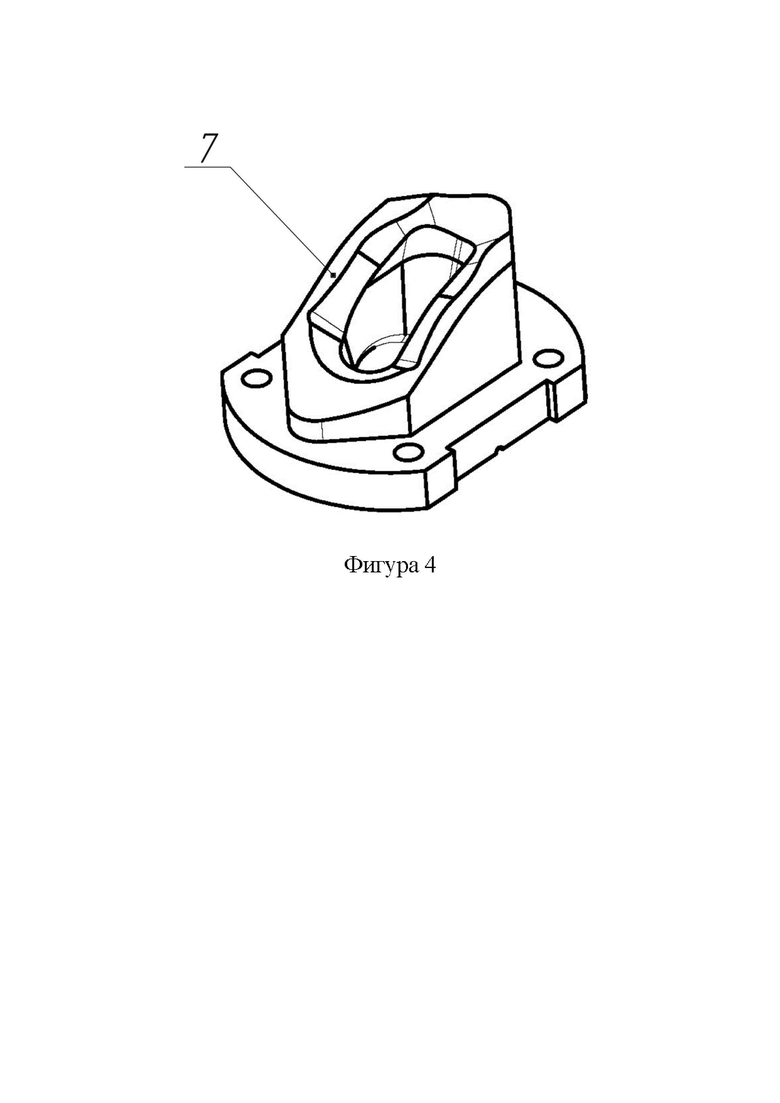
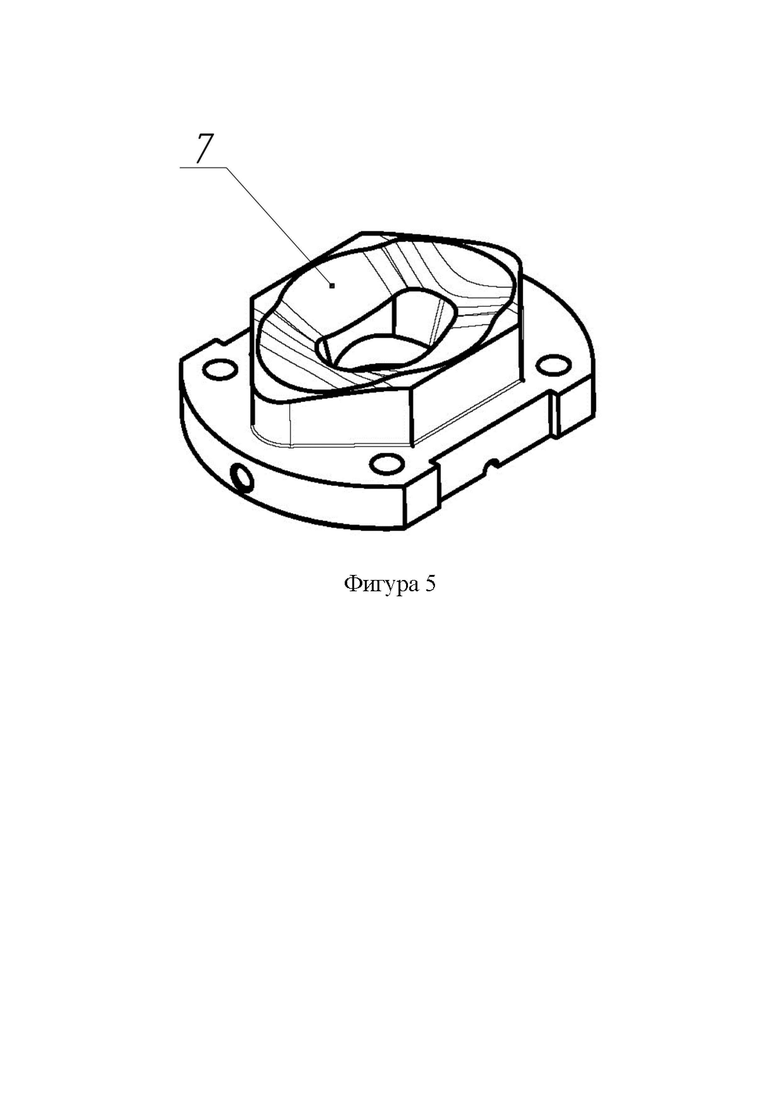
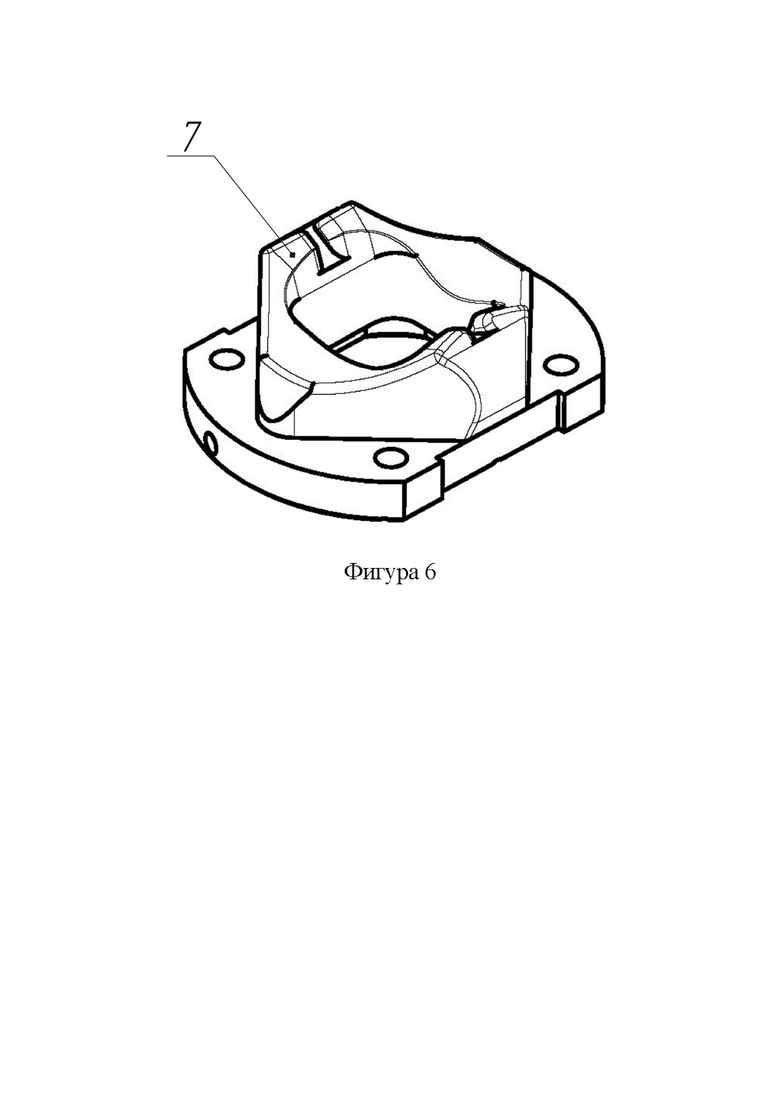
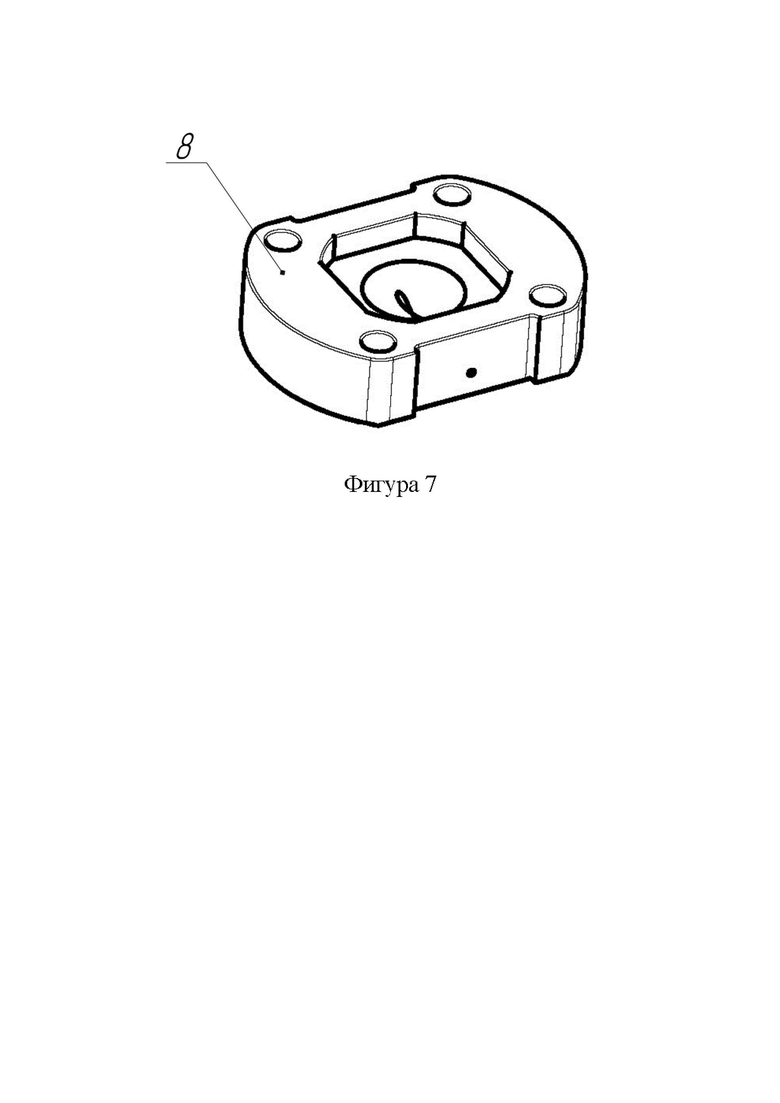
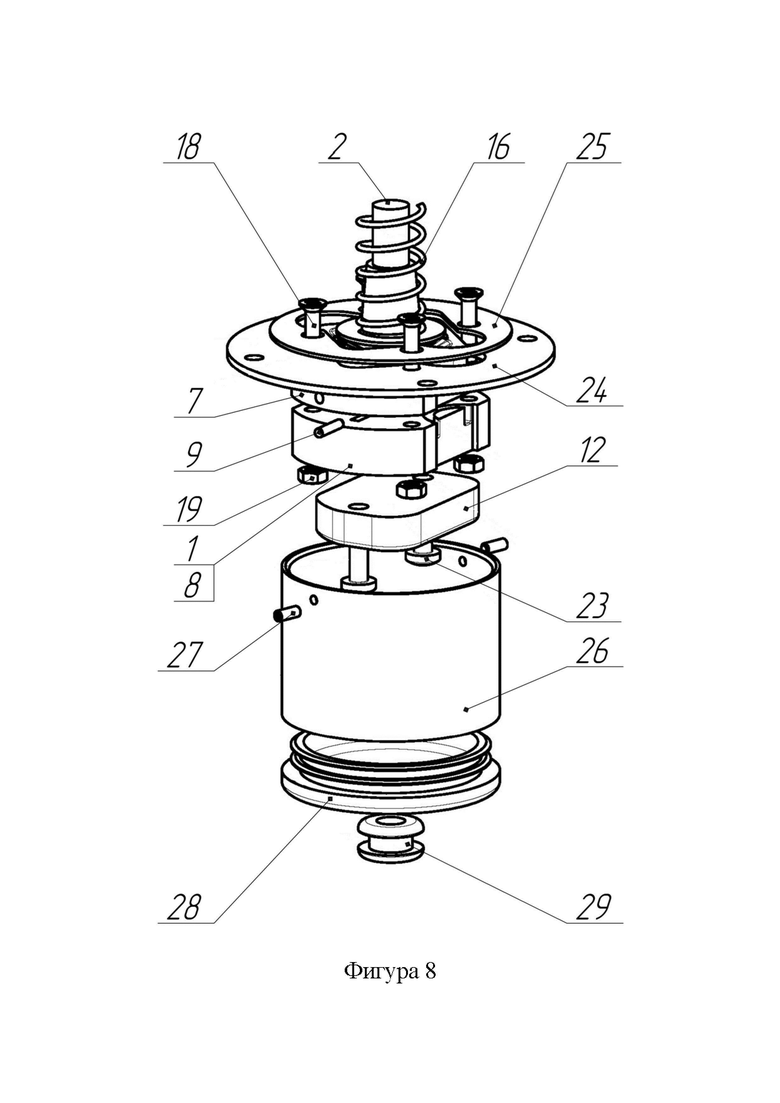
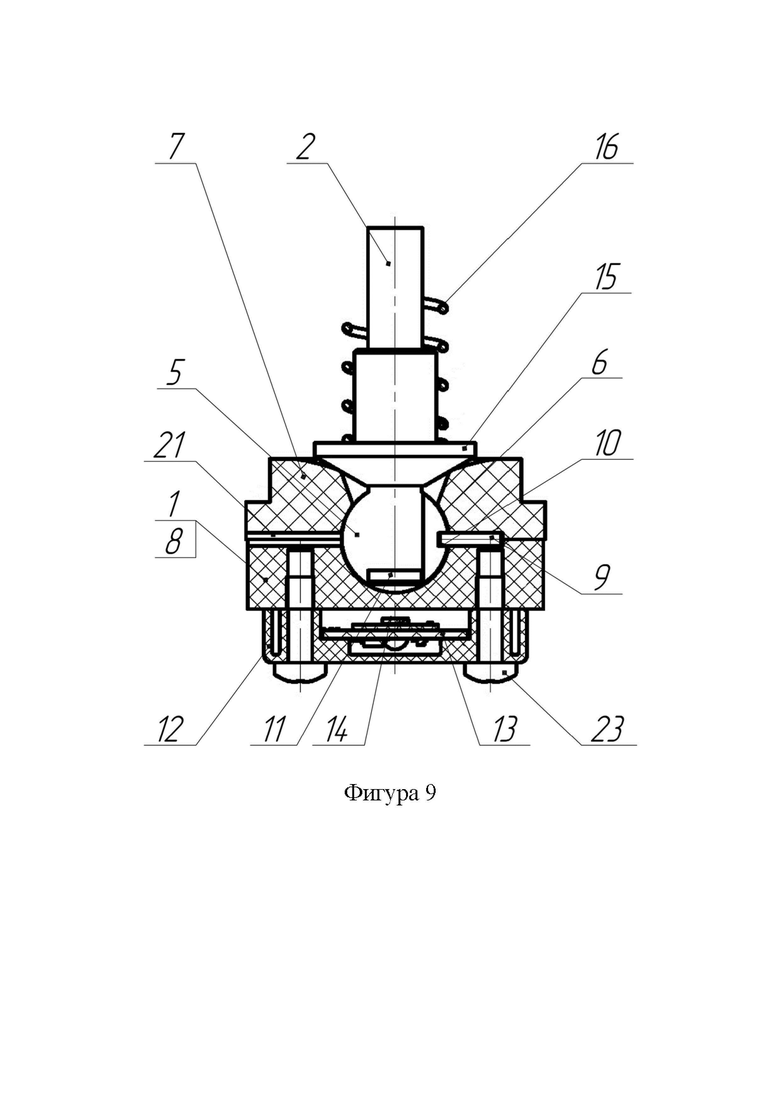
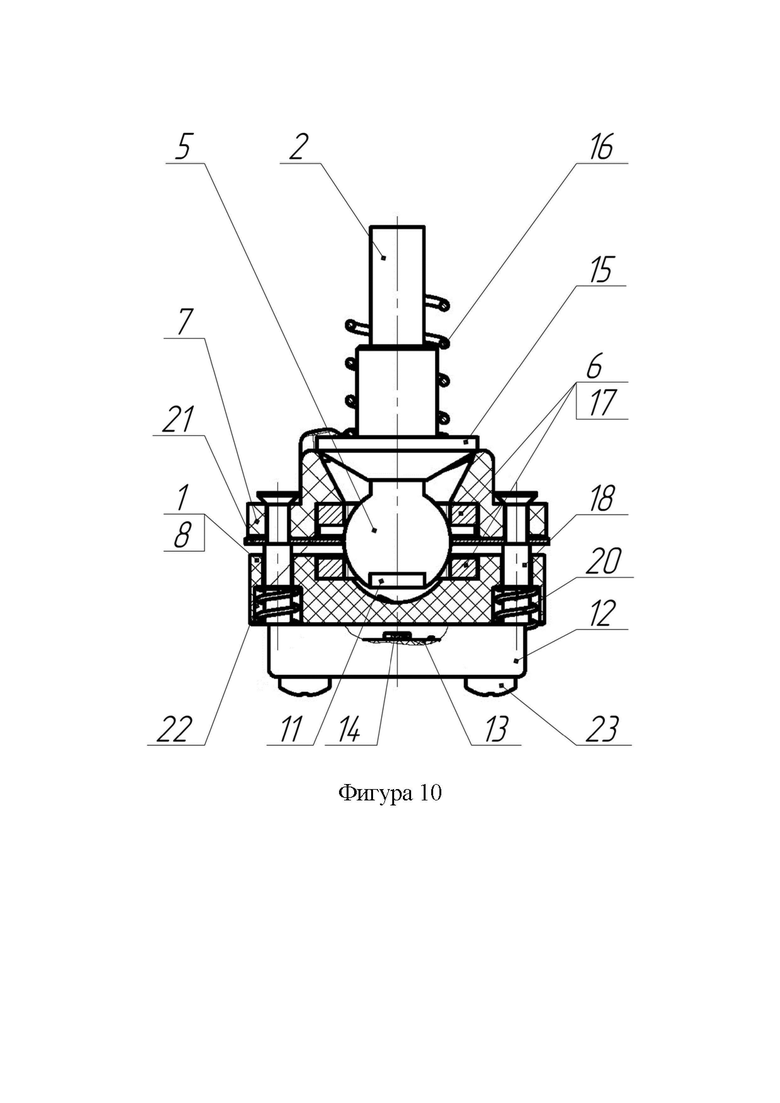
Сущность изобретения поясняется чертежами, на которых представлен частный случай исполнения заявляемого промышленного электронного джойстика с бесконтактным датчиком: на фиг. 1 представлены аксонометрические проекции устройства в различных вариантах исполнения по форме рукояток и защитных чехлов; на фиг. 2 - аксонометрическая проекция магниточувствительного датчика с обозначением магнитной полярности и координатных осей; на фиг. 3 - аксонометрическая проекция корпуса в форме, реализованной с возможностью двухосевого перемещения рычага с возвратом в центральное положение по координатным осям в плоскости, параллельной верхнему виду устройства; на фиг. 4 - аксонометрическая проекция корпуса в форме, реализованной с возможностью одноосевого перемещения рычага с возвратом в крайнее по координатным осям в плоскости, параллельной верхнему виду устройства; на фиг. 5 - аксонометрическая проекция корпуса в форме, реализованной с возможностью одноосевого перемещения рычага с возвратом центральное положение по координатным осям в плоскости, параллельной верхнему виду устройства; на фиг. 6 - аксонометрическая проекция корпуса в форме, реализованной с возможностью перемещения рычага по одной из двух координатных осей с его фиксацией по другой из координатных осей; на фиг. 7 - аксонометрическая проекция крышки; на фиг. 8 - разнесённый вид аксонометрической проекции модуля электронного дистанционного управления; на фиг. 9 - разрез по виду спереди модуля электронного дистанционного управления; на фиг. 10 - разрез по виду сбоку модуля электронного дистанционного управления, где:
1 - модуль электронного дистанционного управления;
2 - рычаг модуля электронного дистанционного управления;
3 - рукоятка;
4 - защитный чехол;
5 - сферическая головка;
6 - обойма сферической посадки;
7 - корпус модуля электронного дистанционного управления;
8 - крышка модуля электронного дистанционного управления;
9 - штифт обоймы сферической посадки;
10 - паз сферической головки;
11 - магнит с аксиальной намагниченностью;
12 - корпусный модуль электронной печатной платы;
13 - электронная печатная платы;
14 - магниточувствительный датчик;
15 - ступенчатый выступ рычага;
16 - возвратная пружина рычага;
17 - фрикционные вставки обоймы сферической посадки;
18 - болтовые соединения обоймы сферической посадки;
19 - гайки болтовых соединений обоймы сферической посадки;
20 - пружины болтовых соединений обоймы сферической посадки;
21 - прокладка между корпусом и крышкой;
22 - стопорные отверстия пружин болтовых соединений обоймы сферической посадки;
23 - винтовые соединения крепления корпусного модуля электронной печатной платы;
24 - фланец модуля электронного дистанционного управления;
25 - шайба модуля электронного дистанционного управления;
26 - патрубок модуля электронного дистанционного управления;
27 - установочные винты патрубка модуля электронного дистанционного управления;
28 - заглушка патрубка модуля электронного дистанционного управления;
29 - проходная кабельная втулка заглушки парубка модуля электронного дистанционного управления.
Частный случай реализации промышленного электронного джойстика с бесконтактным датчиком может быть выполнен следующим образом: промышленный электронный джойстик с бесконтактным датчиком выполнен с модулем 1 электронного дистанционного управления, в верхней части которого на его рычаге 2 закреплена рукоятка 3, и соосно его рычагу 2 расположен защитный чехол 4.
Причём рычаг 2 модуля 1 электронного дистанционного управления в нижней своей части выполнен со сферической головкой 5, которая установлена со сферической посадкой в обойме 6, образованной между корпусом 7 и крышкой 8 и выполненной со штифтом 9, жёстко закрепленным между ними с одной своей стороны, а с другой - свободно расположенным в пазу 10 сферической головки 5, и с одним магнитом 11 с аксиальной намагниченностью, закреплённым по центру торца нижней части рычага 2, а под упомянутой крышкой 8 неподвижно закреплён корпусный 12 модуль электронной печатной платы 13 с одним магниточувствительным датчиком 14, который выполнен с установкой по центру относительно оси рычага 2 под магнитом 11.
Корпус 7 модуля 1 электронного дистанционного управления может быть выполнен в форме, реализованной с возможностью двухосевого перемещения рычага 2 с возвратом в центральное положение, или одноосевого перемещения с возвратом в крайнее или центральное положение по координатным осям в плоскости, параллельной верхнему виду устройства, или перемещения рычага 2 по одной из упомянутых двух координатных осей с его фиксацией по другой из координатных осей.
При этом рычаг 2 может содержать ступенчатый выступ 15, на котором жёстко закреплена возвратная пружина 16 к верхней части рычага 2.
Кроме этого, рычаг и сферическая головка могут быть выполнены в разъемном исполнении, таким образом, что сферическая головка в верхней своей части содержит глухое резьбовое отверстие, образующее винтовую пару с нижней частью рычага.
Причём обойма 6 сферической посадки может содержать фрикционные вставки 17, выполненные с функцией фиксации сферической головки 5 рычага 2 через болтовые 18 соединения с гайками 19 и пружинами 20, которые выполнены с возможностью регулировки жёсткости фиксации сферической головки 5 через прокладку 21 между корпусом 7 и крышкой 8 с упором в их стопорные отверстия 22, а корпусный 12 модуль может быть закреплён к крышке 8 посредством винтовых 23 соединений.
При этом модуль 1 электронного дистанционного управления в верхней части может содержать фланец 24 с шайбой 25, а в нижней части - патрубок 26, одна сторона которого закреплена к корпусу 7 посредством установочных винтов 27, а другая - выполнена с заглушкой 28 и проходной кабельной втулкой 29.
Кроме этого, корпус 7 и крышка 8 могут быть изготовлены из ударопрочного полимерного материала, а рычаг 2 и сферическая головка 5 - из углеродистой стали, легированной стали или цветных металлов.
Причём ударопрочный полимерный материал может быть выполнен в виде капролона, или фторопласта, или полиацеталя, или полиуретана, или текстолита, или стеклотекстолита, или полипропилена, или полистирола, или абс-пластика, или пнд-пластика, или гетинакса.
При этом легированная сталь может быть выполнена в виде коррозионно-стойкой или нержавеющей стали.
Кроме этого, фрикционные вставки 17 могут быть выполнены прямоугольной формы.
Причём защитный чехол 4 может быть выполнен в геометрической форме гофрированного тела вращения.
При этом цветные металлы могут быть выполнены в виде латуни, или бронзы или алюминия.
Промышленный электронный джойстик с бесконтактным датчиком собирают следующим образом: вначале, по центру торца нижней части рычага 2 модуля 1 электронного дистанционного управления закрепляется магнит 11 с аксиальной намагниченностью. Затем, рычаг 2 с магнитом 11 закрепляется в сферической головке 5, которая установлена со сферической посадкой в обойме 6, образованной между корпусом 7 и крышкой 8 и выполненной со штифтом 9, жёстко закрепленным между ними с одной своей стороны, а с другой - свободно расположенным в пазу 10 сферической головки 5. При этом штифт 9 обеспечивает блокировку поворота рычага 2 по одной из двух координатных осей в плоскости, параллельной верхнему виду устройства. Причём в обойму 6 сферической посадки устанавливают фрикционные вставки 17, выполненные с функцией фиксации сферической головки 5 рычага 2 через болтовые 18 соединения с гайками 19 и пружинами 20, которые выполнены с возможностью регулировки жёсткости фиксации сферической головки 5 через прокладку 21 между корпусом 7 и крышкой 8 с упором в их стопорные отверстия 22. После чего, устанавливают фланец 24 с шайбой 25, закрепляют на ступенчатом выступе 15 рычага 2 возвратную пружину 16 и стягивают корпус 7 с крышкой 8 через фланец 24 с шайбой 25 посредством болтовых 18 соединений с гайками 19. После этого, к крышке 8 посредством винтовых 23 соединений неподвижно закрепляют корпусный 12 модуль электронной печатной платы 13 с одним магниточувствительным датчиком 14, который выполнен с установкой по центру относительно оси рычага 2 под магнитом 11. Затем, на верхнюю часть рычага 2 закрепляют защитный чехол 4 и рукоятку 3, выполненную в форме, необходимого конструктивного исполнения. После чего, к нижней части модуля 1 электронного дистанционного управления закрепляют патрубок 26, одна сторона которого закреплена к корпусу 7 посредством установочных винтов 27, а другая - выполнена с заглушкой 28 и проходной кабельной втулкой 29. Затем, устройство фланцем 24 закрепляют на рабочей поверхности с выводом проводов от электронной печатной платы 13 через проходную кабельную втулку 29 и подключают непосредственно к электронной системе управления перемещением исполнительных механизмов.
Промышленный электронный джойстик с бесконтактным датчиком работает следующим образом: магниточувствительный датчик 14 позволяет регистрировать изменения магнитного поля, определяющего направление и угол наклона рукоятки 3. Применение магниточувствительного датчика 14 оптимально для измерения трехмерных, линейных и вращательных движений, с возможностью обнаружения магнитного поля, в зависимости от конструкции джойстика. Конструкция устройства является многофункциональной за счет смены корпуса 7, который может быть выполнен в вариативных геометрических формах, реализующих возможность двухосевого перемещения рычага 2 с возвратом в центральное положение, или одноосевого перемещения с возвратом в крайнее или центральное положение по координатным осям в плоскости, параллельной верхнему виду устройства, или перемещения рычага 2 по одной из упомянутых двух координатных осей с его фиксацией по другой из координатных осей. При отклонении рукоятки 3 в требуемом направлении (вперед/назад/вправо/влево и по диагоналям), происходит вращение сферической головки 5 с магнитом 11 с аксиальной намагниченностью, закреплённым по центру торца нижней части рычага 2, а магниточувствительный датчик 14 фиксирует отклонение магнита 11 и формирует выходной сигнал. Выходной сигнал датчика 14 после обработки микроконтроллером передаётся на внешние устройства. За счет вариативной геометрии корпуса 7, которая обеспечивает требуемую кинематику перемещения рукоятки, реализуется возможность двухосевого перемещения рычага 2 с возвратом в центральное положение, или одноосевого перемещения с возвратом в крайнее или центральное положение по координатным осям в плоскости, параллельной верхнему виду устройства, или перемещения рычага 2 по одной из упомянутых двух координатных осей с его фиксацией по другой из координатных осей. Причём, пружины 20 обеспечивают возможность регулировки жёсткости фиксации сферической головки 5 через фрикционные вставки 17. При слабой фиксации сферической головки 5 с отклонением рукоятки 3 возвратная пружина 16 рычага 2 возвращает рукоятку 3 в центральное положение. В случае жёсткой фиксации сферической головки 5 с отклонением рукоятки 3 её возврат в центральное положение не осуществляется, то есть она может быть зафиксированная в любом выбранном положении.
Указанный технический результат достигается за счет того, что конструктивное выполнение устройства с корпусом в вариативных геометрических формах и магниточувствительным датчиком, реализованном на основе эффекта Холла, в полной мере обеспечивает улучшение и оптимизацию рабочих параметров устройства по повышению точности регулирования выходного сигнала, упрощении конструкции, уменьшении габаритных параметров корпусных элементов для размещения магниточувствительного датчика и магнита, реализации функции фиксации рукоятки джойстика по одной из двух координатных осей в плоскости, параллельной верхнему его виду, а также в повышении несущей способности и долговечности.
Технических решений, совпадающих с совокупностью существенных признаков заявляемого изобретения, не выявлено, что позволяет сделать вывод о соответствии заявляемого изобретения такому условию патентоспособности как «новизна».
Заявляемые существенные признаки, предопределяющие получение указанного технического результата, явным образом не следуют из уровня техники, что позволяет сделать вывод о соответствии заявляемого изобретения такому условию патентоспособности как «изобретательский уровень».
| название | год | авторы | номер документа |
|---|---|---|---|
| Джойстик одноосевой пропорциональный | 2021 |
|
RU2776590C1 |
| Устройство ввода команд для системы управления экскаватором | 2023 |
|
RU2809499C1 |
| Поворотный сопловой аппарат | 2022 |
|
RU2782790C1 |
| Контроллер управления железнодорожным транспортом и способ его работы | 2022 |
|
RU2788226C1 |
| Контроллер управления режимами движения рельсовых тяговых транспортных средств. | 2019 |
|
RU2720390C1 |
| Контроллер управления режимами движения рельсовых тяговых транспортных средств | 2019 |
|
RU2720597C1 |
| Контроллер управления железнодорожным транспортом и способ его работы | 2023 |
|
RU2808302C1 |
| МОДУЛЬ ЭЛЕКТРОННОГО ДИСТАНЦИОННОГО УПРАВЛЕНИЯ НА СЕНСОРАХ ХОЛЛА | 2006 |
|
RU2334267C2 |
| Устройство запорно-регулирующее с электромагнитом | 2020 |
|
RU2749630C1 |
| Реле защиты автотрансформатора | 2022 |
|
RU2783039C1 |
Изобретение относится к электронным джойстикам. Техническим результатом является расширение конструктивных и компактно-компоновочных возможностей, заключающихся в упрощении конструкции, уменьшении габаритных параметров корпусных элементов для размещения магниточувствительного датчика и магнита. Указанный технический результат достигается тем, что промышленный электронный джойстик с бесконтактным датчиком выполнен с модулем электронного дистанционного управления, в верхней части которого на его рычаге закреплена рукоятка, и соосно его рычагу расположен защитный чехол, причём рычаг модуля электронного дистанционного управления в нижней своей части выполнен со сферической головкой, которая установлена со сферической посадкой в обойме, образованной между корпусом и крышкой и выполненной со штифтом, жёстко закрепленным между ними с одной своей стороны, а с другой - свободно расположенным в пазу сферической головки, и с одним магнитом с аксиальной намагниченностью, закреплённым по центру торца нижней части рычага, а под упомянутой крышкой неподвижно закреплён корпусный модуль электронной печатной платы с одним магниточувствительным датчиком, который выполнен с установкой по центру относительно оси рычага под магнитом. 11 з.п. ф-лы, 10 ил.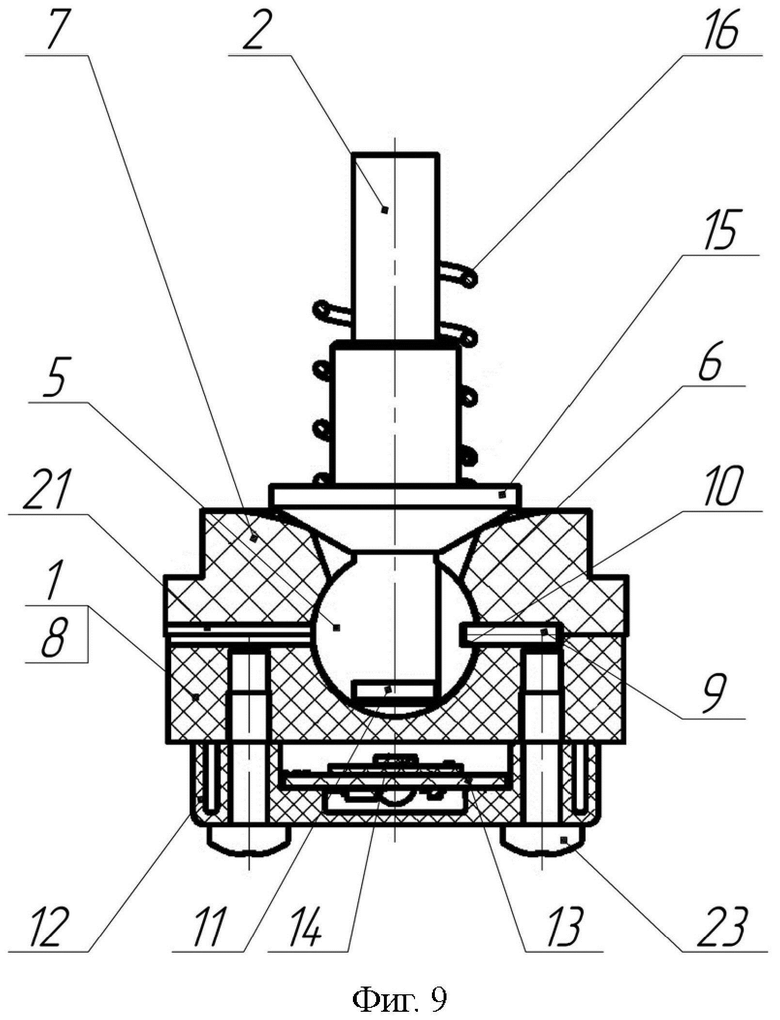
1. Промышленный электронный джойстик с бесконтактным датчиком, выполненный с модулем электронного дистанционного управления, в верхней части чехол, отличающийся тем, что рычаг модуля электронного дистанционного управления в нижней своей части выполнен со сферической головкой, которая установлена со сферической посадкой в обойме, образованной между корпусом и крышкой и выполненной со штифтом, жёстко закрепленным между ними с одной своей стороны, а с другой - свободно расположенным в пазу сферической головки, и с одним магнитом с аксиальной намагниченностью, закреплённым с торца нижней части рычага, а под упомянутой крышкой неподвижно закреплён корпусный модуль электронной печатной платы с магниточувствительным датчиком.
2. Джойстик по п.1, отличающийся тем, что корпус модуля электронного дистанционного управления выполнен в форме, реализованной с возможностью двухосевого перемещения рычага с возвратом в центральное положение, или одноосевого перемещения с возвратом в крайнее или центральное положение по координатным осям в плоскости, параллельной верхнему виду устройства, или перемещения рычага по одной из упомянутых двух координатных осей с его фиксацией по другой из координатных осей.
3. Джойстик по пп.1 и 2, отличающийся тем, что рычаг содержит ступенчатый выступ, на котором жёстко закреплена возвратная пружина к верхней части рычага.
4. Джойстик по пп.1-3, отличающийся тем, что рычаг и сферическая головка выполнены в разъемном исполнении таким образом, что сферическая головка в верхней своей части содержит глухое резьбовое отверстие, образующее винтовую пару с нижней частью рычага.
5. Джойстик по пп.1-4, отличающийся тем, что обойма сферической посадки содержит фрикционные вставки, выполненные с функцией фиксации сферической головки рычага через болтовые соединения с гайками и пружинами, которые выполнены с возможностью регулировки жёсткости фиксации сферической головки через прокладку между корпусом и крышкой с упором в их стопорное отверстие, а корпусный модуль закреплён к крышке посредством винтовых соединений.
6. Джойстик по пп.1 и 2, отличающийся тем, что модуль электронного дистанционного управления в верхней части содержит фланец с шайбой, а в нижней части - патрубок, одна сторона которого закреплена к корпусу посредством установочных винтов, а другая выполнена с заглушкой и проходной кабельной втулкой.
7. Джойстик по пп.1, 2 и 5, отличающийся тем, что корпус и крышка изготовлены из ударопрочного полимерного материала, а рычаг и сферическая головка - из углеродистой стали, легированной стали или цветных металлов.
8. Джойстик по п.7, отличающийся тем, что ударопрочный полимерный материал выполнен в виде капролона, или фторопласта, или полиацеталя, или полиуретана, или текстолита, или стеклотекстолита, или полипропилена, или полистирола, или абс-пластика, или пнд-пластика, или гетинакса.
9. Джойстик по п.7, отличающийся тем, что легированная сталь выполнена в виде коррозионно-стойкой или нержавеющей стали.
10. Джойстик по п.5, отличающийся тем, что фрикционные вставки выполнены прямоугольной формы.
11. Джойстик по п.1, отличающийся тем, что защитный чехол выполнен в геометрической форме гофрированного тела вращения.
12. Джойстик по п.7, отличающийся тем, что цветные металлы выполнены в виде латуни, или бронзы, или алюминия.
| МОДУЛЬ ЭЛЕКТРОННОГО ДИСТАНЦИОННОГО УПРАВЛЕНИЯ НА СЕНСОРАХ ХОЛЛА | 2006 |
|
RU2334267C2 |
| Станок для придания концам круглых радиаторных трубок шестигранного сечения | 1924 |
|
SU2019A1 |
| БОКС ДЛЯ ЗАГОТОВКИ КРОВИ | 0 |
|
SU171081A1 |
| УПРАВЛЯЮЩЕЕ УСТРОЙСТВО | 2006 |
|
RU2388040C2 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| US 5969520 A1, 19.10.1999. | |||

