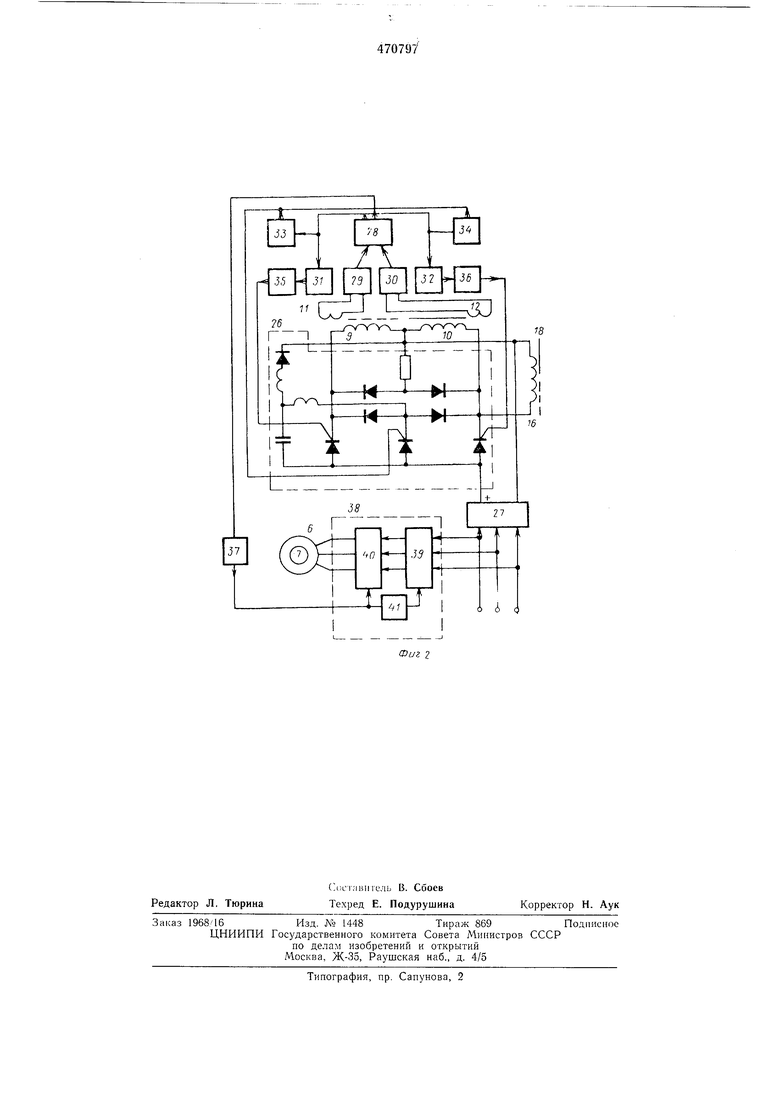
торого через усилители-преобразователи 29, 30 соединены с датчиками 11, 12 положения бойка 13; один из выходов связан со схемами задержек 31, 32 и усилителями-преобразователями 33-36, а другой выход через функциональный преобразователь 37 соединен с системой 38 регулирования напряжения в функции частоты и нагрузки на валу двигателя-вращателя, содержащий регулируемый выпрямитель 39, автономный инвертор 40 и блок согласования 41.
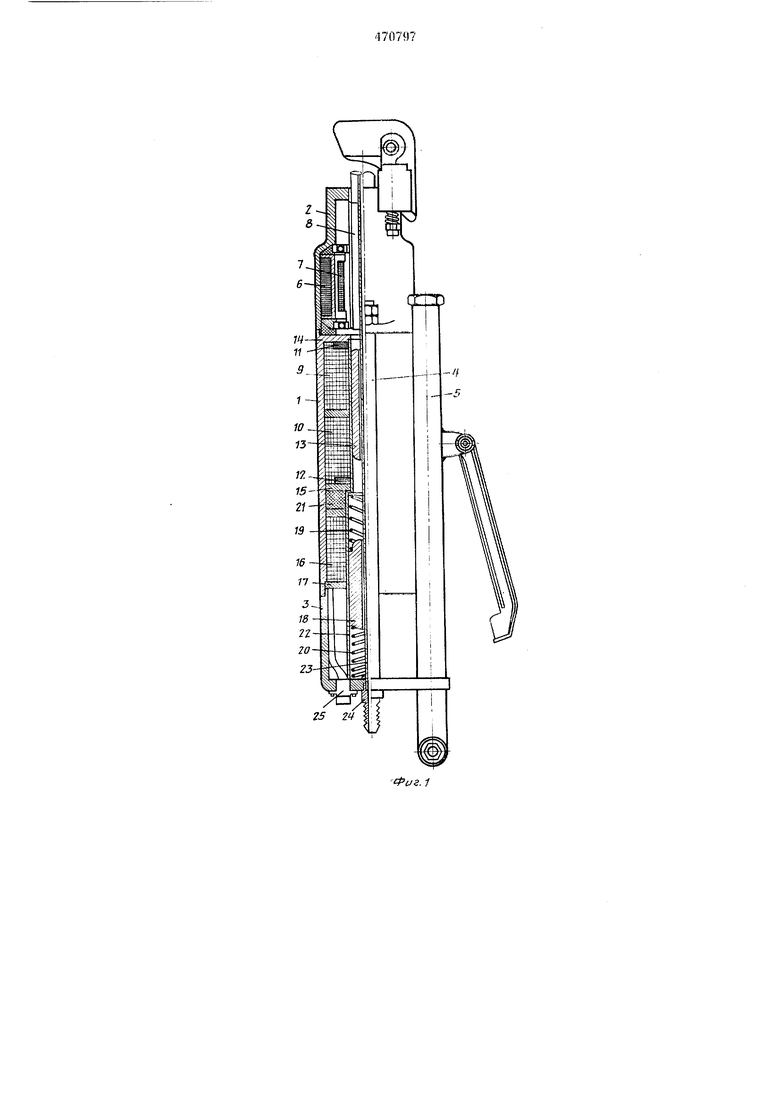
Допустим, что одповременпо протекают токи в обмотках 10, 16, бойки 13, 18 движутся встречно, соударяются и начинают движение в разные стороны; боек 18 под действием пружип 19, 20 возвращается в исходное положение, а боек 13 втягивается в обмотку 9, через которую в момент соударения бойков начинает протекать ток. Триггер 28 находится в исходном положении. Боек 3 движется и ударяет по хвостовику инструментодержателя 8, и импульсом с датчика 11 триггер 28 опрокидывается в нулевое положение. Импульсы пост пают на тиристоры схемы питания 26, к управляемому выпрямителю 27 подключаются обмотки 10, 16, а бойки 13, 18 начинают Д1зигаться встречно до соударения, после чего весь рабочий процесс взаимодействия двигателей ударного действия повторяется. Так как боек 13 отдает свою энергию обратного хода бойку 18, а не корпусу перфоратора, то впбрации корпуса значительно снижаются.
В связи с тем, что коммутация силовых обмоток 9, 10 основного электромагнитного двигателя ударного действия осуществляется от
датчиков конечного поло.жепия посредством триггера 28, то частота колебаний якоря меняется в зависимосгл от физико-механических свойств горной породы, типа инструмента и
условий бурения автоматически, через коэффициент отскока. В зависимости от частоты ударов меняется скорость вращения двигателя-вращателя, т. е. буровая коронка поворачивается на требуемый угол с учетом ударного
скалывания породы. Все это улучшает процесс бурения и увеличивает срок службы инструмента.
Предмет изобретения
Система автоматического регулирования рабочим органом электромагнитного перфоратора, состоящая из тиристорной схемы питакия, электрических двигателей ударного и вращательного действия, системы регулирования напряжения двигателя-вращателя, усилителей-преобразователей, схем задержки и датчиков конечного положения бойка, отличающаяся тем, что, с целью одновременного автоматического управления работой электрических двигателей враща-гельного и ударного действия, датчики конечного положения бойка связаны со входом управляющего триггера,
первый выход которого через преобразователь соединен с системой регулирования напряжения двигателя-вращателя, а другой его выход через схемы задержек и усилители-преобразователи соединены с тиристорной схемой
питания двигателя ударного действия.
25 2V
| название | год | авторы | номер документа |
|---|---|---|---|
| Система регулирования электромагнитного молота | 1986 |
|
SU1388556A2 |
| Гидравлическая буровая установка | 1979 |
|
SU920192A1 |
| УСТРОЙСТВО УДАРНОГО ДЕЙСТВИЯ | 1991 |
|
RU2020054C1 |
| БУРИЛЬНАЯ ВРАЩАТЕЛЬНО-УДАРНАЯ МАШИНА | 2003 |
|
RU2247212C1 |
| Электромагнитный привод ударного действия | 1990 |
|
SU1745920A1 |
| УСТРОЙСТВО ДЛЯ РАЗРУШЕНИЯ ГОРНЫХ ПОРОД УДАРНЫМИ ИМПУЛЬСАМИ | 2019 |
|
RU2720041C1 |
| Электромагнитная машина ударного действия | 1985 |
|
SU1261785A1 |
| ПОВОРОТНО-УДАРНЫЙ МЕХАНИЗМ Б.Н.СТИХАНОВСКОГО (ВАРИАНТЫ) | 1995 |
|
RU2095234C1 |
| Гидравлическая бурильная машина | 1972 |
|
SU443166A1 |
| Электромагнитный перфоратор | 1986 |
|
SU1373805A1 |