Изобретение относится к горной промышленности, в частности к управляемым электромагнитным молотам, предназначенным для дробления негабаритов, и может быть использовано для управления электромагнитным двигателем возвратно-поступательного действия при забивке свай, анкеров, шпунта.
Известен электромагнитный привод ударного действия, содержащий электромагнитный двигатель с обмотками прямого и обратного хода, боек, блок управления, источник питания обмоток с управлением от сигналов с контактного датчика, размещенного на втулке наголовника.
Недостаток привода заключается в том, что в выбранном режиме работы электромагнитный двигатель имеет низкий КПД, а наличие контактного датчика снижает общую надежность привода.
Известно устройство, в котором электромагнитный молот содержит размещенные одна над другой соосные электромагнитные катушки, разделенные диамагнитными фланцами и питающиеся каждая от своего источника, боек, верхняя часть которого расположена внутри катушки, датчики положения бойка, число которых равно числу катушек и которые подключены через согласующие блоки к соответствующим входам источников питания катушек.
Недостатком устройства является низкий КПД, так как включение первых двух катушек в момент удара приводит к значительным перегрузкам второй катушки и недоиспользованию первой.
Наиболее близким по технической сущности к заявляемому является электромагнитный молот, который содержит четыре размещенные одна над другой соосные электромагнитные катушки, разделенные диамагнитными фланцами и питающиеся каждая от своего источника, боек, верхняя часть которого расположена внутри нижней катушки, три датчика положения бойка, блок согласования, осуществляющий переключения обмоток по сигналам с датчиков.
Недостатком данного молота является низкая надежность, обусловленная отсутствием контроля температуры обмоток и нестабильностью моментов отключения двух верхних катушек. Отсутствие контроля температуры приводит к перегреву обмоток и сокращению срока службы электромагнитного двигателя. Нестабильность моментов отключения двух верхних обмоток обусловлена нестабильностью времязадающих цепей одновибраторов, определяющих длительность работы этих обмоток.
Цель изобретения - повышение надежности привода за счет исключения возможного перегрева катушек и стабилизации моментов отключения двух верхних катушек
в режиме максимальной энергии удара.
Поставленная цель достигается тем, что привод снабжен четырьмя датчиками - реле температуры обмоток, двумя датчиками положения бойка, элеьентом 5И, четвертым и
0 пятым элементами 2И, третьим, четвертым, пятым и шестым RS-триггерами, двухка- нальным инвертирующим буферным элементом с общим входом размещения, двумя неинвертирующими буферными элемента5 ми с двумя входами разрешения у каждого и переключателем, причем датчики - реле температуры размещены по одному в каждой обмотке, а их выходы, являющиеся первым, вторым, третьим и четвертым входами
0 блока управления, подключены к одноименным входам элемента 5И, пятый вход которого подключен через кнопку Стоп к минусу источника, а выход связан с входом R третьего RS-триггера, вход S которого че5 рез первый контакт переключателя и кнопку Пуск подключен к минусу источника, прямой выход третьего триггера - к второму контакту переключателя, инверсный выход третьего триггера - к первому входу третье0 го элемента 2И, к второму входу которого подключен инверсный выход одновибрато- ра, связанный через второй контакт переключателя с первыми входами первого, второго, четвертого, пятого элементов 2И,
5 выходы которых подключены к R-входам одноименных RS-триггеров, S-входы первого и второго триггеров - к выходам соответственно первого и второго каналов первого буферного элемента, вход разрешения кото0 рого подключен к выходу третьего элемента 2И, S-входы четвертого и пятого триггеров - к выходам соответственно второго и третьего буферных элементов, первые разрешающие входы которых подключены к выходу
5 шестого триггера, а вторые входы - к выходам первого и второго элементов НЕ соответственно, вход первого элемента НЕ связан с вторым входом четвертого элемента 2И, вход второго буферного элемента - с
0 входом второго канала первого буферного элемента, вход третьего буферного элемента - с вторым входом первого элемента 2И, второй вход второго элемента 2И подключен к инверсному выходу четвертого тригпе5 ра, второй вход пятого элемента 2И - к. S-входу шестого RS-триггера, вход R которого связан с S-входом второго триггера и с выходом второго канала первого буферного элемента, причем выходы первого и второго датчиков положения, являющиеся пятым и
шестым входами блока управления, подключены соответственно к входам первого и второго каналов первого буферного элемента, выходы третьего и четвертого датчиков положения, являющиеся седьмым и восьмым входами блока управления - к входам первого и второго элементов НЕ соответственно, выход пятого датчика положения, являющийся девятым входом блока управления, подключен к S-входу шестого триггера, а прямые и инверсные выходы первого, второго, четвертого и пятого триггеров являются выходами блока управления и функциональными входами Пуск и Стоп соответственно второго, первого, третьего и четвертого блоков питания обмоток.
На фиг. 1 показан электромагнитный привод ударного действия с частичным разрезом электромагнитного двигателя; на фиг. 2 - схема устройства управления приводом; на фиг. 3 - временная диаграмма -работы электромагнитного привода ударного действия.
Привод {фиг, 1) содержит линейный электромагнитный двигатель 1 с четырьмя одинаковыми по размерам обмотками 2-5 длиной I, разделенными диамагнитными фланцами 6-8 и заключенными в ферромагнитные корпуса 9-12 с ферромагнитными полюсами 13, 14 на внешних торцах крайних обмоток 2,5. Обмотки, фланцы и полюса центрируются диамагнитной направляющей 15, внутри которой перемещается боек 16, ударяя по наголовнику (шаботу) 17.
Каждая обмотка 2-5 имеет свой датчик- реле 18-21 температуры типа ДТР-ЗМ-УТ- 140° и подключена к выходу своего блока 22-25 питания. В свою очередь каждый блок 22-25 питания состоит из силового тири- сторного преобразователя (управляемого выпрямителя) 26-29 и блока 30-33 управляющих синхроимпул ьсов. Каждый блок 22-25 питания имеет по два функциональных входа 34-41, которые являются и входами соответствующих блоков 30-33 синхроимпульсов.
Функциональные входы 34-37 являются входами Пуск. Сигнал, поступающий на эти входы 34-37, разрешает подачу синхроимпульсов из блоков 30-33 к тиристорным преобразователям 26-29, т.е. размешает подачу напряжения с блоков 22-25 питания на обмотки 2-5 электромагнитного двигателя 1. Функциональные входы 38-41 являются входами Стоп. Сигнал, поступающий на эти входы 38-41, запрещает подачу синх ро- импульсов из блоков 30-33 к преобразователям 26-29, т.е. снимает напряжение с
выхода блоков 22-25 питания и обмоток 2- 5.
В промежутке между наголовником 17 и полюсом 13 нижней обмотки 2 расположены 5 по вертикали один над другим в отверстиях направляющей 15 пять датчиков 42-46 положения бойка, В качестве датчиков положения используются бесконтактные конечные выключатели типа КВП-16. на вы0 ходе которых появляется сигнал логической 1 в момент появления в зоне чувствительности датчиков металла. При отсутствии металла на выходе датчиков логической О. Таким образом, при движении бойка
5 вверх на выходах датчиков 42-46 происходит изменение сигналов из 1 в О, а при движении бойка вниз наоборот - из О в 1.
Нижний датчик 42 размещен вблизи
0 нижнего торца бойка 16, когда боек нахо дится на наголовнике 17. При этом верхний торец бойка находится на уровне фланца 6 между обмотками 2 и 3. Датчик 43 расположен над датчиком 42 на расстоянии 3/41, а
5 датчик 44 - под датчиком 43 на расстоянии toj последнего.
Расстояние между датчиками 44 и 45 равно 1/2Е а между датчиками 45 и 46- 1/2t, и расположены они также друг над другом.
0 Такое расположение датчиков обеспечивает оптимальный режим переключения обмо- ток и наибольший КПД электромагнитного привода ударного действия.
Назначение датчиков 42-46 - выдача
5 сигналов о местоположении бойка 16, формирование же сигналов управления на включение того или иного блока 22-25 питания производит блок 47 управления по сигналам с датчиков 42-46. Функциональные
0 входы 34-41 блоков 22-25 питания являются выходами блока 47 управления, а выходы датчиков-реле 18-21 температуры и датчиков 42-46 положения бойка являются входами блока 47 управления, схема которого
5 представлена на фиг. 2.
Этот блок содержит кнопки 48 Пуск и 49 Стоп, переключатель 50, шесть RS- триггеров 51-56 с низким активным уров0 нем для входов установки и сброса, пять элементов 2И 57-61, элемент 5И 62, двухка нальный инвертирующий буферный элемент с тремя состояниями на выходе и входом 63 разрешения, два неинвертирую5 щих буферных элемента 64, 65 с двумя входами разрешения у каждого и тремя состояниями выхода, два элемента НЕ 66, 67, одновибратор 68 с возможностью изменения длительности выходного импульса, осуществляемой потенциометром 69.
Двухпозиционный сдвоенный переключатель 50 служит для задания двух различных режимов работы электропривода. При одном положении переключателя (фиг. 2), когда замкнуты контакты 2 и 3, устройство работает в режиме единичных ударов, т.е. при нажатии кнопки 48 Пуск совершается только один подъем бойка, а высота подъема h задается временным интервалом (импульсом) с одновибратора 68. Изменяя длительность выходного импульса одновибратора 68 потенциометром 69, можно плавно изменять высоту подъема бойка h в широком диапазоне 0 h Ьмакс, где Нмакс -31, т.е. потенциометр 69 служит для плавной регулировки энергии единичного удара. В другом положении сдвоенного переключателя 50, когда замкнуты контакты 1 и 2, устройство работает в автоматическом (циклическом) режиме, т.е после нажатия кнопки 48 Пуск боек будет совершать возвратно-поступательное движение с максимальной энергией удара (максимальная высота подъема бойка) до тех пор, пока не нажмем кнопку 49 Стоп
Привод работает следующим образом, В момент включения боек находится в зоне чувствительности всех датчиков 42-46 и на их выходах присутствует сигнал логической 1. Сдвоенный переключатель 50 находится в положении, когда обе пары его контактов 1 и 2 замкнуты. При нажатии кнопки 48 Пуск (фиг. 2) на прямом выходе Р5-тригера51 устанавливается 1, которая поступает на первые входы элементов 2И 58-61 и разрешает им передачу уровня сигналов, имеющихся на вторых входах. Одновременно на инверсном выходе триггера 51 устанавливается О, который через элемент 2И 57 поступает на вход разрешения буферного элемента 63 и разрешает этому элементу передачу входных сигналов с инверсией по каждому из каналов. При этом уровень 1 сдатчика 42, пройдя через первый канал элемента 63, станет уровнем О и установит триггер 52 в 1, а уровень 1 с датчика 43, пройдя второй канал элемента 63, установит триггер 53 в 1 и сбросит в О триггер 56, разрешая работу буферных элементов 64, 65. Прямые выходы триггеров 53, 52 подключены к входам 34, 35 Пуск блоков 30, 31 синхроимпульсов в блоках 22, 23 питания обмоток 2, 3 (фиг. 1). На выходе тиристорных преобразователей 26, 27 появляется напряжение И2, ИЗ и по обмоткам 2, 3 протекает ток 12,13 (фиг. 3), создавая электромагнитную силу тяги, под действием которой боек 16 начинает движение вверх.
При подъеме бойка на высоту h 3/4Ј (расстояние между датчиками 42 и 43) на выходе датчика 43 установится О (на S-вхо- де триггера 53 установится 1), который,
пройдя буферный элемент 64, устанавливает триггер 54 в 1. Работа буферного элемента 64, имеющего два входа разрешения, была подготовлена 1 от датчика 44 через инвертор 66, а так. се О с выхода триггера
0 56.
Одновременно с установкой триггера 54 в 1 происходит сброс триггера 53 в О путем подачи низкого уровня с инверсного выхода триггера 54 через элемент 2И 59 на
5 R-вход триггера 53. При этом на прямом выходе триггера 53 устанавливается О, а на инверсном 1, т.е. сигнал 1 с входа 34 Пуск снимается и подается на вход 38 Стоп, что означает отключение тиристор0 ного преобразователя 26 и снятие напряжения с обмотки 2, Установка триггера 54 в 1 возбуждает вход 36 Пуск блока 32 синхроимпульсов в блоке 24 питания обмотки 4. На выходе тиристориого преобразователя 28
5 появляется напряжение 144, и по обмотке 4 протекает ток 14. Боек под действием силы тяги обмоток 3 и 4 продолжает движение вверх.
При подъеме бойка на высоту h 1 3/4Ј
0 на выходе датчика 44 установится О, который через инвертор 66 поступает 1 на один из входов разрешения буферного элемента 64 и переводит последний в состояние с очень большим выходным сопро5 тивлением (состояние Z). Низкий уровень с датчика 44 сбрасывает триггер 52 через элемент 2И 58 и устанавливает триггер 55 в 1 через буферный элемент 65, работа которого была подготовлена с одной стороны 1
0 от датчика 45 через инвертор 67, а с другой стороны О с выхода триггера 56. Сброс триггера 52 означает установку с входа 35 Пуск блока 31 синхроимпульсов и возбуждает вход 39 Стоп, В результате преобра5 зователь 27 в блоке 23 питания обмотки 3 выключится и обмотка 3 обесточится. Установка в 1 триггера 56 означает работу входа 37 Пуск блока 33 синхроимпульсов в блоке 25 питания, т.е. включение преобра0 зователя 29 и появление на его выходе напряжения И5, а в обмотке 5 тока 15. Боек под действием силы тяги от токов в обмотках 4 и 5 поднимается выше.
Когда боек достигает высоты h 2 1 /41,
5 на выходе датчика 45 устанавливается О, который через элемент 2И 60 сбрасывает триггер 54 в О, а через элемент НЕ 67 запрещает буферному элементу 65 передачу сигналов, т.е. элемент 65 переходит в состояние с очень большим выходным сопротивлением (состояние Z). Сброс триггера 54 означает установку 1 на его инверсном выходе, т.е. на входе 40 Стоп блока 32 синхроимпульсов в блоке 24 питания обмотки 4. Этот сигнал запретит работу преобразователя 28, и обмотка 4 обесточится. Боек движется под действием силы от тока 15 в обмотке 5. Наличие полюса 14 существенно повышает тяговое усилие обмотки 5, что позволяет ей одной осуществлять дальнейший подъем бойка,
Когда боек достигает высоты h 2 3/4Е, на выходе датчика 46 устанавливается О, который через элемент 2И 61 сбрасывает триггер 55 и устанавливает триггер 56 в 1, подтверждая тем самым переход буферных элементов 64, 65 в состояние Z Сброс триггера 55 означает установку 1 на его инверсном выходе, т.е. на входе 41 Стоп блока 33 синхроимпульсов в блоке 25 питания обмотки 5. По этому сигналу преобразователь 29 отключится и обмотка 5 обесточится. Боек, совершив свободный выбег за счет сил инерции, остановится на высоте пмакс 3f, a затем под действием силы тяжести падает вниз.
На расстоянии h 3/4Сдо удара на выходе датчика 43 появляется 1, а после инверсии буферным элементом 63 - О, который сбросит триггер 56 в О и установит триггер 53 в 1, т.е. включит преобразователь 26 блока 22 питания через вход 34 Пуск блока 30 синхроимпульсов. На выходе блока 22 питания появляется напряжение И2, и по обмотке 2 течет ток 12. В момент удара на выходе датчика 42 происходит смена сигнала из О в 1. Этот сигнал, пройдя буферный элемент 63, инвертируется и устанавливает триггер 52 в 1, которая.через вход 35 Пуск блока 31 синхроимпульсов в блоке 23 питания запускает преобразователь 27. На выходе блока 23 питания появляется напряжение ИЗ, а в обмотке 3 - ток i3.
Боек после удара поднимается так же, как было описано ранее. Далее циклы повторяются. Остановка электропривода производится нажатием кнопки 49 Стоп. При этом происходит сброс триггера 51, т.е. на его прямом выходе появляется О, который через контакты переключателя 50 и элементы 2И 58 - 61 сбрасывает в О триггера 52 - 55, а 1 с инверсного выхода триггера 51 через элемент 2И 57 запрещает работу буферного элемента 63, т е. переводит его в состояние Z. Остановка привода произойдет и тогда, когда в одной из обмоток 2-5 сработает один из датчиков-р ле 18-21 температуры. При этом контакты датчика замкнутся и сигнал низкого уровня поступит на
один из четырех входов схемы 5И 62 и сбросит триггер 51. Это произойдет, когда температура одной из обмоток превысит 140°С. Если- сдвоенный переключатель 50 на- 5 ходится в положении, когда обе пары его контактов 2 и 3 замкнуты (фиг. 2), то при нажатии кнопки Пуск осуществляется запуск одновибратора 68. При этом его прямой выход разрешает работу элементам 2И
0 58 - 61 и подготавливает триггеры 52 - 55, снимая с их R-входов низкий уровень. Одновременно инверсный выход одновибратора- 68, на котором установился временно О, через элемент 2И 57 разрешает работу бу5 ферного элемента 63, т.е. сигналы с датчиков 42, 43, инвертируясь, запускают триггеры 52, 53 и далее протекают те же самые процессы, что и в циклическом режиме, описанном раньше. Процесс переключе0 ния обмоток и подъем бойка будут продолжаться до тех пор, пока существует импульс на выходе одновибратора 68, т.е. если длительность этого импульса ти равна времени t подъема бойка на высоту пмакс 3f,
5 то работа привода при подъеме бойка протекает так же, как описано раньше, но при этом после времени ти t привод придет в исходное состояние и после падения бойка для его следующего подъема нужно будет
0 опять нажать кнопку 48 Пуск и т.д.
Если же длительность импульса ти одновибратора меньше времени t подъема бойка на высоту h 2 3/4Е то как только окончится импуль с, на прямом выходе одно5 вибратора установится О, который запретит работу элементов 2И 59-61 и сбросит в О триггеры 52 - 55, а инверсный выход одновибратора 68 через элемент 2И 57 своей 1 запрещает работу буферного зле0 мен га 63, т.е. после окончания действия импульса происходят те же процессы, что и при нажатии кнопки Стоп в циклическом режиме. При работе привода в режиме единичного удара изменением длительности
5 импульса с одновибратора 68 с помощью потенциометра 69 можно регулировать высоту подъема бойка, а следовательно, и энергию удара.
Формула изобретения
0 Электромагнитный привод ударного действия, содержащий электромагнитный- двигатель с четырьмя обмотками, разделенными диамагнитными фланцами и соосно размещенными одна над другой на диамаг5 нитной направляющей, внутри которой установлен с возможностью перемещения ферромагнитный боек, верхняя часть которого расположена внутри нижней обмотки, а нижняя часть бойка установлена с возможкостью взаимодействия с шаботом наголовника, расположенные друг над другом в промежутке между наголовником и нижней обмоткой три датчика положения бойка, источник питания, четыре блока для питания обмоток с двумя функциональными входами Пуск и Стоп в каждом, которые подключены к выходам блока управления, содержащего кнопки Пуск, Стоп, два RS-триггера. одновибратор, два элемента 2И, выходы которых подключены к R-входам первого и второго RS-триггеров, и два элемента НЕ, отличающийся тем, что, с целью повышения надежности за счет, исключения возможности перегрева обмоток и стабилизации моментов отключения двух верхних обмоток, он снабжен четырьмя датчиками-реле температуры обмоток, двумя датчиками положения бойка, элементом 5И, третьим, четвертым и пятым элементами 2И, третьим, четвертым, пятым и шестым RS-триггерами, двухканальным инвертирующим буферным элементом с общим входом разрешения, двумя неинвертирующими буферными элементами с двумя входами разрешения у каждого и переключателем, причем датчики-реле температуры размещены по одному в каждой обмотке, а их выходы, являющиеся первым, вторым, третьим и четвертым входами блока управления, подключены к одноименным входам элемента 5И, пятый вход которого подключен через кнопку Стоп к минусу источника питания, а выход связан с R-входом третьего RS-триггера, S-вход которого, через первый контакт переключателя и кнопку Пуск подключен к минусу источника питания, прямой выход третьего триггера подключен к второму контакту переключателя, инверсный выход третьего триггера подключен к первому входу третьего элемента 2И, к вто рому входу которого подключен инверсный выход одновибратора, связанный через второй контакт переключателя с первыми входами первого, второго, четвертого, пятого
элементов 2И, выходы которых подключены к R-входам одноименных RS-триггеров, S- входы первого и второго триггеров подключены к выходам соответственно первого и
второго каналов первого буферного элемента, вход разрешения которого подключен к выходу третьего элемента 2И, S-входы четвертого и пятого триггеров подключены к выходам соответственно второго и третьего
буферных элементов, первые разрешающие входы которых подключены к выходу шестого триггера, а вторые входы - к выходам первого и второго элементов НЕ соответственно, вход первого элемента НЕ связан с
вторым входом четвертого элемента 2И, вход второго буферного элемента связан с входом второго канала первого буферного элемента, вход третьего буферного элемента связан с вторым входом первого элемента 2И, второй вход второго элемента 2И подключен к инверсному выходу четвертого триггера, второй вход пятого элемента 2И подключен к S-входу шестого RS-триггера, R-вход которого связан с S-входом триггера
и с выходом второго канала первого буферного элемента, причем выходы первого и второго датчиков положения, являющиеся пятым и шестым входами блока управления, подключены соответственно к входам первого и второго каналов первого буферного элемента, выходы третьего и четвертого датчиков положения, являющиеся седьмым и восьмым входами блока управления, подключены к входам первого и второго элементов НЕ соответственно, выход-пятого датчика положения, являющийся девятым входом блока управления, подключен к S- входу шестого триггера, а прямые и инверсные выходы первого, второго, четвертого и
пятого триггеров являются выходами блока управления и функциональными входами Пуск и Стоп соответственно второго, первого, третьего и четвертого блоков питания обмоток,


| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОМАГНИТНЫЙ МОЛОТ | 1988 |
|
SU1584480A1 |
| ЭЛЕКТРОМАГНИТНЫЙ ПРИВОД | 1989 |
|
SU1731018A1 |
| Электропривод | 1990 |
|
SU1830611A1 |
| Устройство для торможения противовключением трехфазного асинхронного электродвигателя | 1988 |
|
SU1577044A1 |
| Ковочное устройство | 1981 |
|
SU1219218A1 |
| Устройство для управления включением резервных исполнительных элементов | 1990 |
|
SU1749886A1 |
| МНОГОКАНАЛЬНАЯ СИСТЕМА ДЛЯ РЕГИСТРАЦИИ ФИЗИЧЕСКИХ ВЕЛИЧИН | 1991 |
|
RU2037190C1 |
| Электромагнитный привод ударного действия | 1986 |
|
SU1352607A1 |
| Устройство для ввертывания сердечников в катушки | 1987 |
|
SU1642531A1 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 2006 |
|
RU2325620C2 |

Изобретение относится к горной промышленности и позволяет повысить надежность привода. Основным преимуществом предлагаемого привода по сравнению с прототипом является более высокая надежность, полученная как за счет исключения возможности перегрева обмоток (ОБ) 2 - 5, т.е. за счет снабжения ОБ 2 - 5 датчиками - реле 18-21 температуры, так и за счет стабилизации моментов отключения двух f пверхних ОБ, т.е. отключения каждой из двух верхних ОБ по сигналам от отдельного датчика 42-46 положения. Стабильность моментов отключения ОБ полностью исключает вынужденные простои из-за подстройки времязадающих элементов, определяющих моменты отключения двух верхних ОБ в прототипе. Отсутствие вынужденных остановок повышает производительность труда. Преимуществом предлагаемого электропривода является и то, что в нем предусмотрены два режима работы - ручной и автоматический. При этом cyuject- вует возможность регулирования энергии единичного удара, что очень важно в начальные моменты при забивке свай, шпунта либо в процессе дробления негабаритов. Причем при регулировании энергии удара оптимальность процесса управления сохраняется и при этом повышается надежность, т.к. используется один регулировочный элемент задающий время работы двух верхних ОБ (вместо двух в прототипе). 3 ил. ASC У Z Ј VI 4 СЛ О ю о Фиг1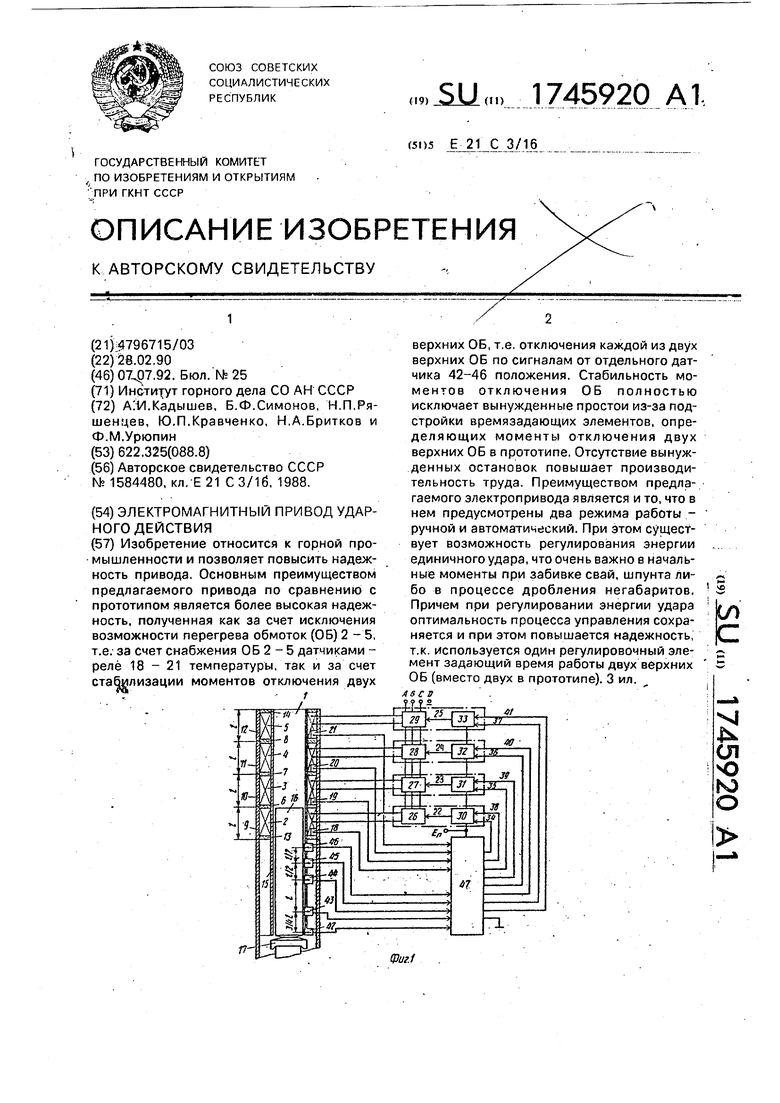

| ЭЛЕКТРОМАГНИТНЫЙ МОЛОТ | 1988 |
|
SU1584480A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
