мерительных обмоток датчика; на фиг. 3 - схема работы датчика.
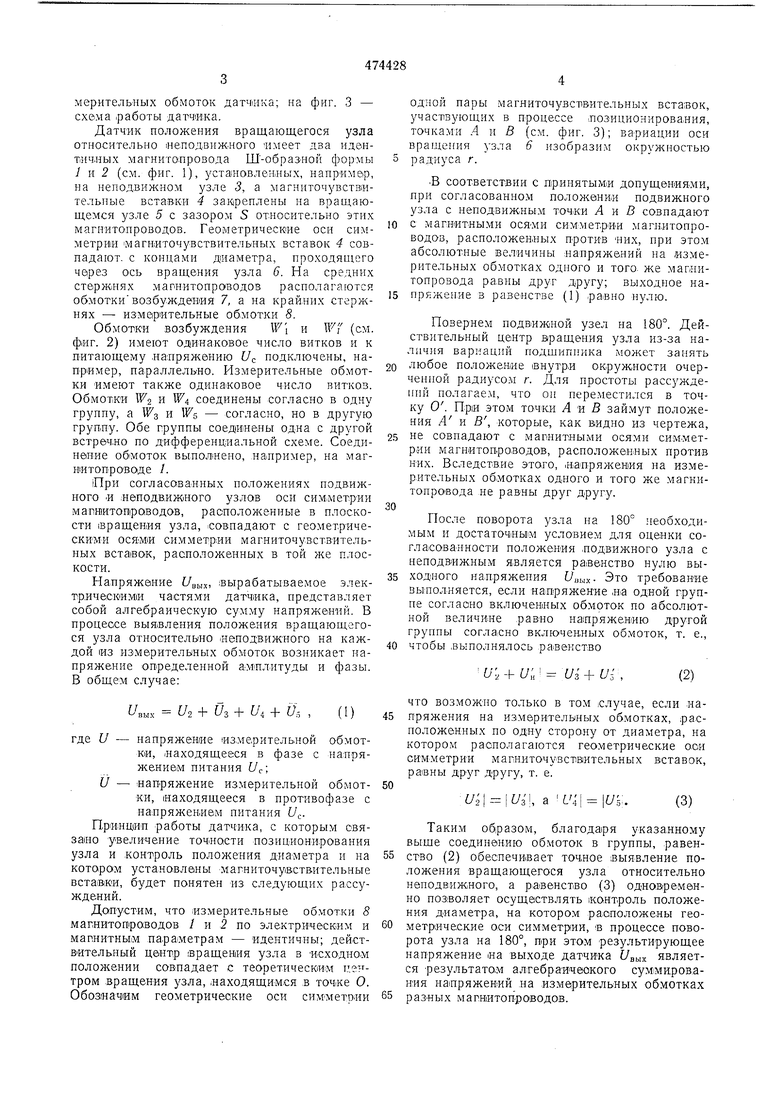
Датчик положения вращающегося узла относительно «еподвиж ного имеет два идентичных магнитопровода Ш-образион формы и 2 (см. фиг. 1), уста1иовле шь х, напр«ме р, на неподвижном узле 3, а магниточувствительные вставки 4 закреплены на вращающемся узле 5 с зазором S относительно этих магнитопроводов. Геометрические оси симметрии |магниточувствительиых вставок 4 совпадают, с концами диаметра, проходящего через ось вращения узла 6. На средних стержиях магнитопроводов располагаются обмоткивозбуждения 7, а на крайних стержнях - измерительные обмотки 8.
Обмотки возбуждения W и W, (см. фиг. 2) имеют одинаковое число витков и к питающему иаиряжению U подключены, например, параллельно. Измерительные обмотки имеют также одина ковое число витко.в. Обмотки Wz и W соединены согласно в одну группу, а Wa и - согласно, но в другую группу. Обе группы соеди1нены одна с другой встреч.но по дифференциальной схеме. Соединение обмоток выполнено, например, на магнитопроводе /.
При согласованных положениях подвижного и иеподвижиого узлов оси сим.метрии малн1итоп|роводов, расположенные в плоскости шращения узла, |Совпадают с геометрическими осЯМИ симметрии магниточувствительных вставок, расположенных в той же плоскости.
Напряжение f/вых. вырабатываемое электрическими частями датчика, представляет собой алгебраическую сумму напряжений. В процессе выявления положения вращающегося узла относительно неподвижного на каждой из из мерительных обмоток возникает напряжение определенной а:М Плитуды и фазы. В случае:
УВЫХ f/2 + f/3 + 4 + ,(1)
где и - напряжение из.мерительной обмотки, находящееся в фазе с напряжением питания L/C,
и - напряжение измерительной обмотки, находящееся в противофазе с ианрял ением питания U. Пр1Инцип работы датчика, с которым связано увеличение точности позиционирования узла и контроль положения диаметра и на котором установлены магниточувствительные встав1ки, будет понятен из следующих рассуждений.
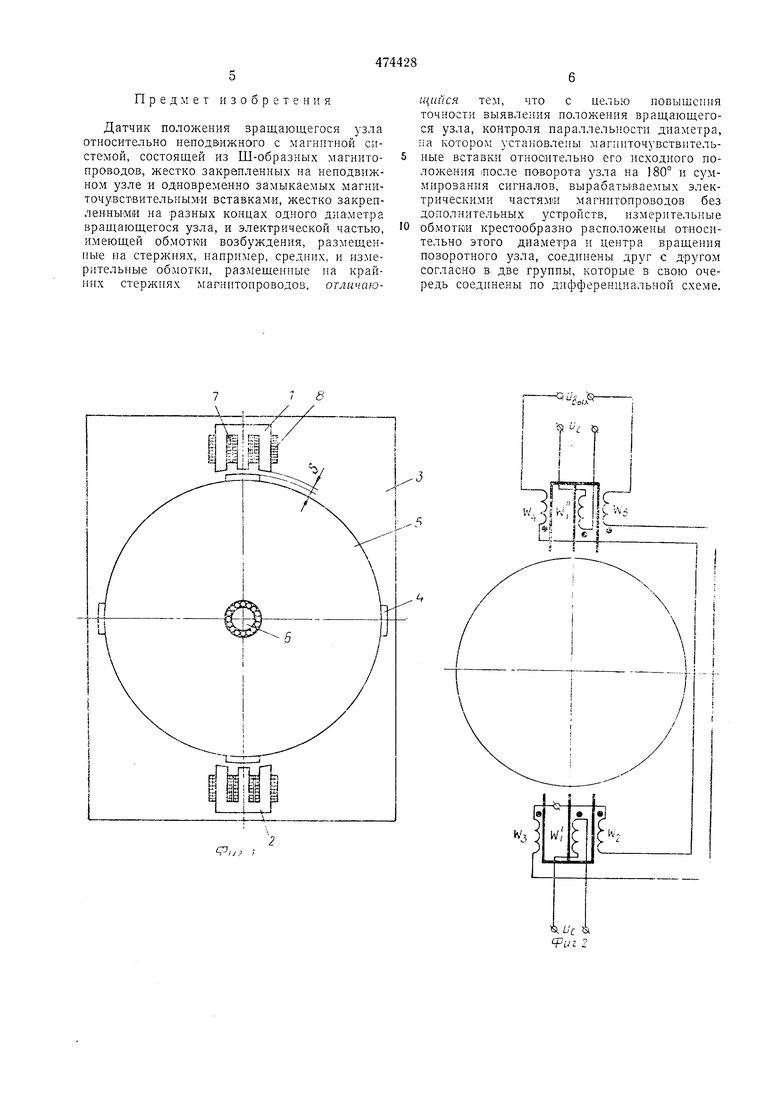
Допустим, что измерительные обмотки 8 магнитопроводов / и 2 по электрическим и магнитным параМетрам - идентичны; действительный центр вращения узла в исходном положении совпадает с теоретическим т .егтром вращения узла, находящимся в точ|Ке О. Обозначим геометрические оси симметрии
одной пары магниточувствительных вставок, участвующих в процессе позиционирования, тачками .4 и В (см. фиг. 3); вариации оси вращения узла 6 изобразим окружностью радиуса г.
Б соответствии с принятыми допущениями, при согласованном положении подвижного узла с неподвижным точки Л и В совпадают
с магнитными осями симметрии магннтопроводов, расположенных против них, при этом абсолютные величины напряжений на измерительных обмотках одного и того, же мапнитопровода равны друг другу; выходное напряжение в равенстве (1) paiBHO нулю.
Повернем подвижной узел на 180°. Действительный центр вращения узла из-за наличия вариаций подшипника может занять
любое положение внутри окружности очерченной радиусом г. Для простоты рассуждений полагае.м, что он переместился в точку О . При этом точки Л -и В займут положения .4 и В , которые, как В(идно из чертежа,
не совпадают с магнитными осями симметрии магнитопроводов, расположенных против них. Вследствие этого, Н1апряжения на измерительных обмотках одного и того же магнитопрО1Вода не равны друг другу.
После поворота узла на 180° необходимым и достаточньим условием для оценки согласованности положения иодвижного узла с неподвижным является равенство нулю выходного наиряжения Uab,x- Это требование выполняется, если нанряжение на одной группе согласно включен1ных обмоток по абсолютной величине равно наиряжению другой группы согласно включенных обмоток, т. е.,
чтобы выполнялось paiBeHCTBo
U + U, Uz + U ,
(2)
что воз.можно только в том случае, если напряжения на измерительных обмотках, распо.тоженных по одну сторону от диаметра, на котором располагаются геометрические оси симметрии магниточувствительных вставок, равны друг другу, т. е.
f/sl, а Ч4 U5:.
(3)
Uo
Таким образом, благодаря указанному выше соединению обмоток в группы, равенство (2) обеспечивает точное выявление положения вращающегося узла относительно неподв:ижного, а равенство (3) одновреманно позволяет осуществлять контроль положения диаметра, на котором расположены геометрические оси симметрии, в процессе поворота узла на 180°, при этом результирующее напряжение на выходе датчика f/abix является результатам алгебраического cyMiMKpoB.aния наиряжений на измерительных обмотках
разных магн|Итопроводов.
Предмет изобретения
Датчик положения вращающегося узла относительно неподвижного с магнитной системой, состоящей из Ш-образных магнитопроводов, жестко закрепленных на неподвижном узле и одновременно замыкаемых магниточувстВительныМИ вставками, жестко закрепленнЫМИ на разных концах одного диа1метра вращающегося узла, и электрической частью, имеющей обмоткя возбуждения, размещенные на стержнях, например, средних, и измерительные обмотки, размещенные на крайних стержнях магн 1тоироводов, отличаю6
щиася тем, что с целью повышения точности выявле-шя положения вращающегося узла, контроля параллельности диаметра, на котором установлены магииточувствительные вставки относительно его исходного положения после поворота узла на 180° и суммирования сигналов, вырабатываемых электрическими частям магнитопроводов без дополнительных устройств, измерительные обмотюи крестообразно расположены относительно этого диаметра и центра вращения поворотного узла, соединены друг с другом согласно в две группы, которые в свою очередь соединены по дифференциальной схеме.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для бесконтактной передачи сигналов с вращающегося объекта | 1977 |
|
SU714150A1 |
| Устройство для измерения крутящего момента на вращающихся валах | 1990 |
|
SU1770786A1 |
| Вентильный электродвигатель с тахометрическим генератором | 1985 |
|
SU1419531A3 |
| БЕСКОНТАКТНЫЙ ДАТЧИК УГЛОВОГО ПОЛОЖЕНИЯ ВАЛА | 2005 |
|
RU2378613C2 |
| БЕСКОНТАКТНЫЙ ДАТЧИК СКОРОСТИ ВРАЩЕНИЯ И ПОЛОЖЕНИЯ РОТОРА | 2012 |
|
RU2488122C1 |
| Энергонезависимый датчик углового положения вала | 2024 |
|
RU2828613C1 |
| Устройство для определения геометрических размеров зубцовой зоны магнитопроводов статора и ротора электрической машины | 1983 |
|
SU1145312A1 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА | 1998 |
|
RU2144254C1 |
| СТАТОР ЭЛЕКТРИЧЕСКОЙ МАШИНЫ | 2004 |
|
RU2305889C2 |
| СПОСОБ ДЛЯ ОПРЕДЕЛЕНИЯ ВРАЩАЮЩЕГО МОМЕНТА ЭЛЕКТРОДВИГАТЕЛЯ С КОРОТКОЗАМКНУТЫМ РОТОРОМ | 2002 |
|
RU2243572C2 |
%,Я :
ймл
U
