1
Изобретение относится к морскому приборостроению и может быть использовано для выдвижения приборов в рабочее положение, установленных на различных исследовательских и поисковых подводных аппаратах типа батискаф и батисфера. К такому роду приборов отиосятся, например, осветительные лампы, датчики, акустические приборы и т. д., которые устанавливаются преимущественно в допиой части аппаратов.
Во избежание повреждения приборов при подъеме подводных аппаратов из воды и установке их на судно-иоситель возникает необходимость поднятия этих приборов в специальные защитные ниши и автоматического выдвижеиия их в рабочее положение при погружении аппаратов в воду.
Известен рычажный механизм для выдвижения приборов подводного аппарата, например батискафа, включающий щтангу, закрепленную шариирно, в нише подводного аппарата, на одном конце которой установлен прибор, а на другом конце - поплавок шаровой формы. Однако вес поплавка в воздухе может оказаться недостаточным для поднятия прибора при подъеме аппарата из воды.
Цель изобретения - обеспечение автоматического выдвижения прибора при погружении ПОДВОДНОГО аппарата в воду.
В предлагаемом рычажном механизме к
поплавку шаровой формы присоединена открытая спизу тонкостепиая емкость с внутренними тонкостенными поперечными переборками и отверстиями в ее верхней части
для пропуска воды. Поперечные переборки служат для сохранения воды в тонкостенной емкости при нахождении ее в воздухе в иаклонном положении.
Для обеспечения поднятия прибора (при
нахождении подводиого аппарата в воздухе) в исходное положение следует обеспечить неравенство
Gn/i + GeM/i + G,/i-Gnp/2 0,
где Gn , GCM , GB , Gnp - вес поплавка, тонкостенной емкости, воды в емкости и прибора соответственно;
/1 и /2 - длина рычагов штанги от оси поповорота шарнира до цеитров тяжести поплавка, топкостениой емкости, воды в емкости и прибора соответственно.
Так как вес конструкции самой тонкостенной емкости весьма мал, то им можно пренебречь, тогда
25
,/,Gnp/2 0.
(1)
Для выдвижения прибора в рабочее положение при нахождении аппарата в воде сле30 дует обеспечить неравенство
(С„-1Г„) /1+()1-(Олр-W,p ) ,
где Wn, W,, W,
водоизмещение поплавпр
ка, воды в емкости и прибора соответственно.
При Гв G, . ()/i-(G,p-Wnp) , (2)
Поскольку место для установки прибора ограничено, то
.
Пз неравенства (1) при G,,p С„ и Сз 0 вес поплавка в воздухе может оказаться недостаточным для поднятия прибора ирн подъеме аппарата из воды.
Установка дополнительного груза, например в виде свинцовых чушек, может привести к выполнению неравенства (1), но к нарушению неравенства (2), так как ве груза больше веса вытесненной им воды, и, следовательно, прибор при погружении подводного аппарата в воду не выдвинется в рабочее положение.
При установке же тонкостенной емкости с внутренними поперечными тонкостенными переборками и отверстиями в ее верхней части для пропуска воды удовлетворяются неравенства (1) и (2), так как в воде W G
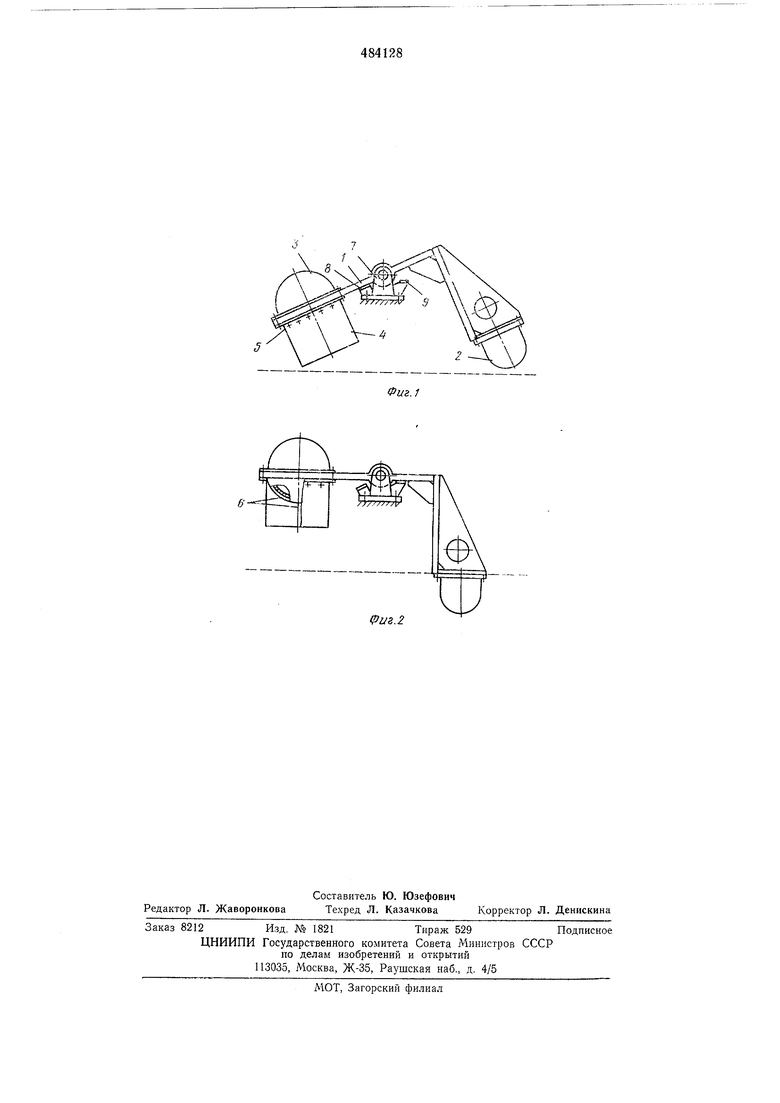
На фиг. 1 изображен описываемый рычажный механизм при нахождении прибора в воздухе; на фиг. 2 - то же, при нахождении прибора в воде.
Рычажный механизм включает в себя штангу 1, на одном конце которой закреплен прибор 2, а на другом - поплавок 3 с присоединенной к нему тонкостенной емкостью 4, имеющей вверху отверстия 5 для пропуска
воды. Причем емкость разделена поперечными тонкостенными переборками 6.
Штанга в средней части закреплена на шарнире, который установлен на стойке 7, имеющей верхний 8 и нижний 9 упоры, обеспечивающие установку П1танги в крайних положениях. Стойка иеносредственно крепится к подводному аппарату или же является частью его.
При погружении в воду прибор 2 под действием своей силы тяжести и поплавка 3, имеющего положительную плавучесть (W,, G,i ; WB GB ), автоматически выдвигается вниз до упора 9, тем самым выставляется в рабочее положение.
При подъеме аппарата из воды прибор 2 под действием веса воды в тонкостенной емкости и веса поплавка автоматически поднимается в верхнее положение, ограниченное упором 8.
Предмет изобретения
Рычажный механизм для выдвижения приборов подводного аппарата, например батискафа, включающий штангу, закрепленную шарнирно в нише подводного аппарата, на одном конце которой установлен прибор, а на другом конце - поплавок шаровой формы, отличающийся тем, что, с целью автоматического выдвил ения прибора при погружении подводного аппарата в воду, к поплавку шаровой формы рычажного механизма присоедипена открытая снизу тонкостенная емкость с внутренними тонкостенными ноперечиыми
переборками и отверстиями в ее верхней части для пропуска воды.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СОЗДАНИЯ ПОЛОЖИТЕЛЬНОЙ ПЛАВУЧЕСТИ В ОКЕАНСКОЙ И МОРСКОЙ СРЕДЕ | 2002 |
|
RU2222458C2 |
| Рычажный механизм для выдвижения приборов подводного аппарата | 1975 |
|
SU556079A1 |
| ГЛУБОКОВОДНЫЙ ДОБЫЧНОЙ КОМПЛЕКС И ТЕЛЕУПРАВЛЯЕМЫЙ ПОДВОДНЫЙ РОБОТ | 2002 |
|
RU2214510C1 |
| СУДНО ДЛЯ ПОДВОДНЫХ РАЗВЕДОЧНЫХ РАБОТ | 1926 |
|
SU14887A1 |
| САМОЛЕТ-АМФИБИЯ - ЛЕТНО-СПАСАТЕЛЬНЫЙ КОМПЛЕКС | 2013 |
|
RU2542800C1 |
| САМОХОДНЫЙ НАДВОДНО-ПОДВОДНЫЙ ОСТРОВ-ГИДРОАЭРОДРОМ | 2011 |
|
RU2471669C2 |
| МОБИЛЬНЫЙ ПОДВОДНЫЙ ЖИЛОЙ ДОМ | 2009 |
|
RU2399550C1 |
| САМОХОДНОЕ ПОДВОДНОЕ КАФЕ | 2007 |
|
RU2348565C1 |
| АВТОНОМНОЕ УСТРОЙСТВО ДЛЯ ПОДЪЕМА ПОЛЕЗНЫХ ИСКОПАЕМЫХ СО ДНА АКВАТОРИИ | 2014 |
|
RU2549656C1 |
| КОМПЛЕКС ДЛЯ ПОДЪЕМА ЗАТОНУВШИХ СУДОВ | 2000 |
|
RU2205769C2 |
1рцг.2
