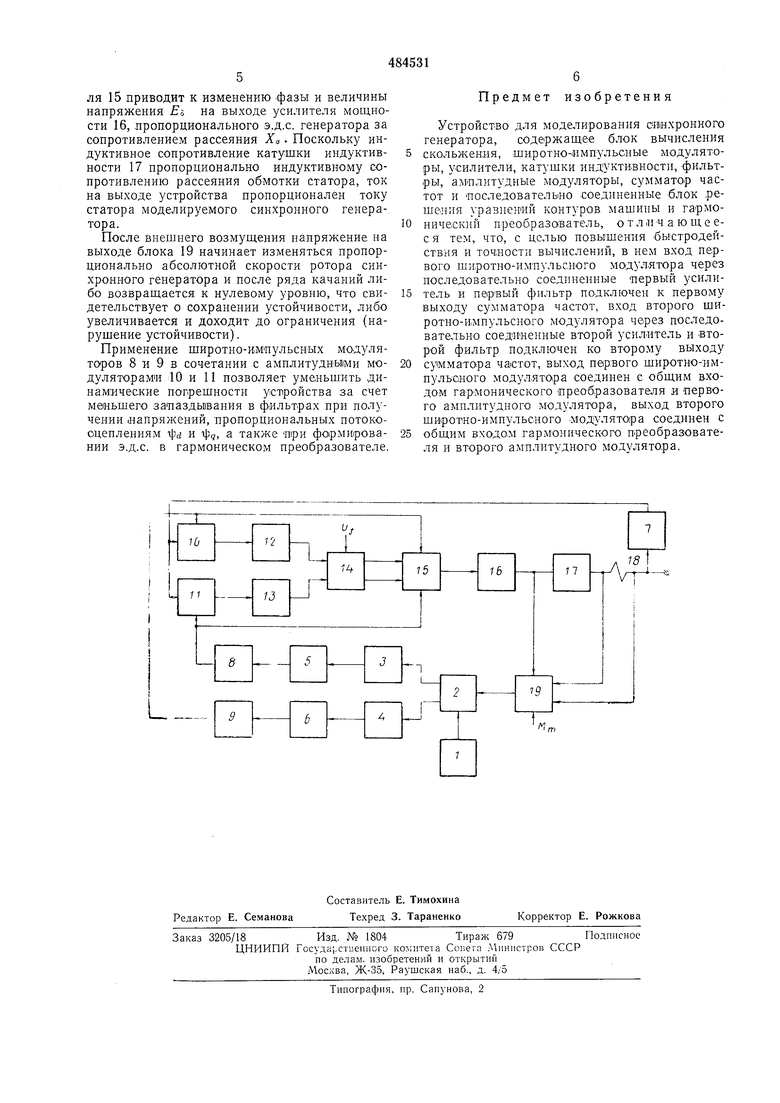
Выход генератора 1 стабильной части подключен к первому входу сумматора частот 2, ко второму входу которого подключен блок 19 вычисления скольжения. Первый выход сумматора частот 2 через последовательно соединенные фильтр 3 и усилитель б соединен со входом широтно-импульсного модулятора 8, второй выход сумматора частот 2 через последовательно соединенные фильтр 4 и усилитель 6 связан со входом широтно-импульсного модулятора 9. Выход широтно-нмпульсного модулятора 8 соединен с общим входом амплитудного модулятора 11 и гармонического преобразователя 15. Выход широтно-импульсного модулятора 9 соединен с обш,нм входом амплитудного модулятора 10 и гармонического преобразователя 15.
К обшему входу амплитудных модуляторов 10 и 11 через усилитель 7 подключено выходное напряжение устройства. Выход амплитудного модулятора 10 через фильтр 12 соединен с первым входом блока 14 решения уравнений контуров машины, второй вход которого через фильтр 13 подключен к выходу амплитудного модулятора 11. На третий вход блока 14 поступает напряжение Uf, пропорциональное напряжению обмотки возбуждения генератора. Первый и второй выходы блока 14 подключены соответственно к первому и второму входам гармонического преобразователя Г5, выход которого через последовательно соединенные усилитель мощности 16, катушку индуктивности 17 и измерительный шунт 18 подключен ко входу усилителя 7. Блок 19 вычисления скольжения по входам соединен с выходом усилителя мощности 16, измерительным шунтом 18 и источником напряжения, пропорционального моменту турбины т. Выход блока 19 подключен ко второму входу сумматора частот 2.
Устройство работает следующим образом.
Напряжение основной частоты с выхода генератора 1 поступает на вход сумматора частот 2. На выходе сумматора получается напряжение, частота которого равна сумме частот входных напряжений. На выходах фильтров 3 и 4 получаются синусоидальные напряжения, сдвинутые по фазе на 90°, которые через усилители 5 и 6 поступают на входы широтноимпульспых модуляторов 8 и 9 (широтно-импульсные модуляторы выполнены в виде управляемых генераторов). На выходах широтно-импзльсных модуляторов 8 и 9 получаются прямоугольные напряжения, частота которых на два порядка выше частоты напряжений, а сквал ность пропорциональна величине входных напряжений. Напряжения с модуляторов 8 и 9 постунают на входы амплитудных модульторов 10 и 11.
В амплитудных модуляторах осуществляется амплитудная модуляция проходящего сигнала с помощью напряжения, поступающего с выхода устройства на общий вход модзляторов 10 и 11 через усилитель 7.
Фильтры 12 и 13 настроены таким образом, что не пропускают напряжения несущей частоты, источником которых являются генераторы в щиротно-импульсных модуляторах 8 и
9, а также напряжение двойной рабочей частоты устройства, образующейся на выходах амплитудных модуляторов 10 и 11.
Напряжения с выходов фильтров 12 и 13, пропорциональные проекциям напряжения
статора на продольную и поперечную оси ротора (, t/d -фгу), поступают На соответствующие входы блока 14 решения уравнений контуров машины, где но заданным величинам Uf, и яре, осуществляется вычисление
нанряжений ij), и ф. , пропорциональных проекциям потокосцепления воздушного зазора на продольную d и поперечную q оси ротора.
Напряжения 1|з, и -ф с выходов блока 14 поступают на первые два входа гармонического преобразователя 15, на третий вход которого поступает напряжение с выхода широтноимпульсного модулятора 8, а на четвертый
вход - напряжение с выхода широтно-импульсного модулятора 9. На выходе гармонического преобразователя получается синусоидальное напряжение, пропорциональное э.д.с. генератора за сопротивлением рассения X, .
Последнее моделируется с помощью катушки индуктивности 17, соединенной с выходом гармонического преобразователя 15 через усилитель мошности 16.
Входящие в состав гармонического преобразователя 15 фильтры не вносят заметной погрешности, так как они используются лишь для фильтрации сигналов несущей частоты (порядка 5 КГЦ), источниками которых являются широтно-импульсные модуляторы 8 и 9.
В блоке 19 вычисления скольжения с помощью интегратора и преобразователя мощности, измеряющего выходную мощность устройства, с учетом заданной величины момента турбины /Пт получается напряжение, пропорциональное скольжению синхронного генератора, которое поступает на вход сумматора частот 2.
При имитации возмущений во внешней сети
(короткие замыкания, включение нагрузки и др.) величина и фаза напряжения Lr на выходе модели синхронного генератора изменяется, в результате чего изменяется скольжение, вычисляемое в блоке 19, что приводит
к изменению фазы напряжений на выходах усилителей 5 и 6. При этом вследствие изменений выходных напряжений щиротно-импульсных модуляторов и входного напряжения амплитудных модуляторов 10 и 11 на выходах фильтров 12 и 13 изменяются напряжения, пропорциональные потокосцеплениям d и , что приводит к изменению выходных величин и я,; блока 14 решения уравнений контуров машины. Изменение указанных величин на входах гармонического преобразовате
ля 15 приводит к изменению фазы и величины напряжения 0 на выходе усилителя мощности 16, пропорционального э.д.с. генератора за сопротивлением рассеяния Ха Поскольку индуктивное сопротивление катушки индуктивности 17 пропорционально индуктивному сопротивлению рассеяния обмотки статора, ток на выходе устройства пропорционален току статора моделируемого синхронного генератора.
После внешнего возмущения напряжение на выходе блока 19 начинает изменяться пропорционально абсолютной скорости ротора синхронного генератора и после ряда качаний либо возвращается к нулевому уровню, что свидетельствует о сохранении устойчивости, либо увеличивается и доходит до ограничения (нарушение устойчивости).
Применение широтно-и-мпульсных модуляторов 8 и 9 в сочетании с амплитудными модуляторами 10 и 11 позволяет уменьшить динамические погрешности устройства за счет меньшего запаздьивания в фильтрах при получении .напряжений, пропорциональных потокооцеплениям i()d и ajj, а также три формировании э.д.с. в гармоническом преобразователе.
6 Предмет изобретения
Устройство для моделирования синхронного генератора, содержащее блок вычисления скольжения, широтно-импульсные модуляторы, усилители, катушки индуктивности, фильтры, амплитудные модуляторы, сумматор частот и Последовательно соединенные блок решения уравнений контуров машины и гармонический преобразователь, отЛ(Ичаюшеес я тем, что, с целью повышения быстродействия и точности вычислений, в нем вход нервого широтно-импульсного мо-дулятора через последовательно соединенные -первый усилитель и первый фильтр подключен к первому выходу сумматора частот, вход второго широтно-импульсного модулятора через последоBaTevibHo соединенные второй усилитель и -второй фильтр подключен ко второму выходу
сумматора частот, выход первого широтно-импульоного модулятора соединен с общим входом гармонического преобразователя и первого амплитудного модулятора, выход второго широтно-импульсного модулятора соединен с
общим входо.м гармонического преобразователя и второго амплитудного модулятора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделированияСиНХРОННОгО гЕНЕРАТОРА | 1979 |
|
SU805360A1 |
| Устройство для моделирования синхронного генератора | 1982 |
|
SU1068952A2 |
| Устройство для моделированияСиНХРОННОй элЕКТРичЕСКОй МАшиНы | 1979 |
|
SU801006A1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ СИНХРОННОЙ МАШИНЫ | 1990 |
|
RU2018953C1 |
| Устройство для измерения параметров резонансных контуров | 1982 |
|
SU1071972A1 |
| ЭНЕРГОСБЕРЕГАЮЩАЯ СИСТЕМА УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ | 2012 |
|
RU2498496C1 |
| УСТРОЙСТВО для МОДЕЛИРОВАНИЯ СИНХРОННОГОГЕНЕРАТОРА | 1968 |
|
SU231905A1 |
| УСТРОЙСТВО КОМПЕНСАЦИИ ИСКАЖЕНИЙ ТОКА И РЕАКТИВНОЙ МОЩНОСТИ | 2009 |
|
RU2393609C1 |
| ГЕНЕРАТОР АМПЛИТУДНО-МОДУЛИРОВАННЫХ СИГНАЛОВ | 2016 |
|
RU2663228C2 |
| Устройство для моделирования переходных процессов синхронного генератора | 1974 |
|
SU602965A1 |
L ,
