Изобретение относится к области электротехники и может быть использовано в системах управления электроприводами общепромышленного применения. Изобретение относится к электротехнике, в частности к частотно регулируемым электроприводам с асинхронным короткозамкнутым двигателем и скалярным способом управления. Изобретение может найти применение в регулируемых электроприводах широкого применения
Известна система векторного управления скоростью асинхронного электропривода (пат. RU №2158055, опубл. 20.10.2000). Система содержит контур потокосцепления ротора, включающий в себя последовательно соединенные элемент сравнения сигнала задания потокосцепления ротора и обратной связи и регулятор потокосцепления ротора, первый контур скорости, включающий в себя последовательно соединенные первый элемент сравнения сигнала задания частоты вращения ротора и обратной связи с датчика скорости, первый блок деления, первый регулятор скорости, выходы регулятора потокосцепления ротора и первого регулятора скорости подключены к соответствующим подчиненным контурам тока, каждый из которых содержит последовательно соединенные сумматор сигнала задания тока и обратной связи с соответствующего выхода преобразователя токов из неподвижной системы координат (α, β), во вращающуюся систему координат (х, у) и регулятор тока, выходы каждого из которых подключены через блок компенсации э.д.с. вращения и перекрестных связей, преобразователь координат из вращающейся системы (х, у) в неподвижную систему (α, β), и преобразователь двухфазной системы сигналов в трехфазную к управляющим входам преобразователя частоты, соединенного силовыми выходами через датчики тока с обмотками асинхронного электродвигателя, в зазоре которого установлены два датчика составляющих главного потокосцепления на элементах Холла, выходы которых через вычислитель составляющих потокосцепления ротора в неподвижной системе координат (α, β) подключены к входам преобразователя потокосцепления ротора из неподвижной системы координат (α, β) во вращающуюся систему координат (х, у), выходы датчиков тока фаз подключены через преобразователь трехфазной системы токов в двухфазную ко вторым информационным входам вычислителя составляющих потокосцепления ротора в неподвижной системе координат (α, β) и входам преобразователя токов из неподвижной системы координат (α, β) во вращающуюся систему координат (х, у), угол поворота которой, относительно неподвижной системы координат (α, β), равен φc=∫ωct, вторые развертывающие входы преобразователей координат подключены к выходам направляющих sinφc и cosφc двухфазного генератора, вторые и третьи входы блока компенсации э.д.с. вращения и перекрестных связей к выходам преобразователя токов из неподвижной системы координат (α, β) во вращающуюся систему координат (х, у) и выходу датчика скорости, отличающаяся тем, что введен контур автоподстройки частоты потокосцепления, содержащий последовательно соединенные регулятор частоты, второй делитель выходной сигнал которого задающий синхронную частоту с подключен к входу двухфазного генератора и четвертому входу блока компенсации э.д.с. вращения и перекрестных связей, а управляющий вход совместно с управляющим входом первого блока делителя, входом обратной связи элемента сравнения контура потокосцепления ротора и пятым входом блока компенсации э. д. с. вращения и перекрестных связей соединен с выходом Ψrx преобразователя потокосцепления ротора из неподвижной системы координат (α, β) во вращающуюся систему координат (х, у) через первый низкочастотный фильтр, причем вход регулятора частоты подключен к выходу Ψrx преобразователя потокосцепления ротора из неподвижной системы координат (α, β) во вращающуюся систему координат (х, у) через второй низкочастотный фильтр, кроме того, введен дополнительный контур скорости, содержащий последовательно включенные второй элемент сравнения сигнала задания частоты и обратной связи с датчика скорости, ключ и второй регулятор скорости, выход которого через элемент сравнения первого контура скорости и первый блок делителей соединен с входом первого регулятора скорости, выход первого элемента сравнения через реле с зоной нечувствительности соединен с управляющим входом ключа.
Недостатком является сложная структура, большое количество настроечных элементов, что влечет в сложность в настройке и низкую надежность. Также эта система не обеспечивает необходимого уровня энергосбережения электропривода.
Известна система векторного управления скоростью асинхронного электропривода (патент RU №2317632, опубл. 20.02.2008). Система содержит контур потокосцепления, включающий в себя последовательно соединенные элемент сравнения задания потокосцепления и обратной связи и регулятор потокосцепления, контур скорости, включающий в себя последовательно соединенные элемент сравнения сигнала задания частоты вращения ротора и обратной связи с датчика скорости, параметрический регулятор скорости с блоком ограничения, выходы регуляторов потокосцепления и скорости подключены через соответствующие подчиненные контуры тока, каждый из которых содержит последовательно соединенные сумматор сигнала задания тока и обратной связи с соответствующего выхода преобразователя токов из трехфазной системы (а, b, с) во вращающуюся систему координат (x, у), регуляторы тока, два канала блока компенсации ЭДС вращения и перекрестных связей, преобразователь координат из вращающейся системы (x, у) в трехфазную систему (а, b, с) и широтно-импульсный модулятор к блоку управления автономным инвертором, соединенного силовыми входами с источником питания, а выходами - с обмотками асинхронного электродвигателя, первый и второй входы блока компенсации ЭДС вращения и перекрестных связей соединены с выходами преобразователя токов из трехфазной системы (а, b, с) во вращающуюся систему координат (x, у), а также последовательно включенные регулятор синхронной частоты, блок деления и интегратор, выход которого соединен с развертывающими входами преобразователя токов из трехфазной системы (а, b, с) во вращающуюся систему координат (x, у), преобразователя координат из вращающейся системы (x, у) в трехфазную систему (а, b, с), вход обратной связи параметрического регулятора скорости соединен с выходом датчика скорости, трехфазную модель двигателя в естественных координатах статора и ротора, три входа которые соединены с силовыми выходами автономного инвертора, а три первых выхода, пропорциональные токам фаз статора, подключены к входам преобразователя токов из трехфазной системы (а, b, с) во вращающуюся систему координат (x, у), преобразователь потокосцепления ротора в систему вращающихся координат (x, у), три входа которого подключены к трем другим выходам модели, пропорциональным потокосцеплениям обмоток ротора, выход rx - к входу обратной связи элемента сравнения контура потокосцепления, третьему входу блока компенсации ЭДС вращения и перекрестных связей и управляющим входам параметрического регулятора скорости и блока деления, выход ry - к входу регулятора синхронной частоты, третий сумматор, два входа которого соединены с выходом интегратора и седьмым выходом модели, соответствующим координате угла поворота ротора, а выход подключен к развертывающему входу преобразователя потокосцепления ротора в систему вращающихся координат (x, у), третий элемент сравнения, два входа которого соединены соответственно с восьмым выходом модели, соответствующим координате частоты вращения, и выходом датчика скорости, а выход через регулятор компенсации момента нагрузки соединен с входом координаты статического момента модели.
Недостатком является сложная структура, большое количество настроечных элементов, что влечет в сложность в настройке и низкую надежность. Также эта система не обеспечивает необходимого уровня энергосбережения электропривода.
Известна система управления асинхронным двигателем (патент RU №2390091, опубл. 20.05.2010), которая принята за прототип. Система содержит блок ввода заданной частоты вращения асинхронного двигателя, блок рассогласования, регулятор напряжения, блок драйверов, автономного инвертора напряжения, датчик текущей частоты вращения асинхронного двигателя, блок вычисления синхронной частоты вращения асинхронного двигателя, дополнительный блок выбора оптимального скольжения, блок расчета оптимального потокосцепления, блок расчета оптимального значения вектора тока статора, блок вычисления токовой ошибки, блок выбора вектора напряжения, наблюдатель состояния, включающий в себя блок вычисления электрической частоты вращения ротора, блок вычисления текущего вектора тока статора и блок расчета конструктивных параметров, причем выход блока ввода заданной частоты вращения асинхронного двигателя соединен с первым входом блока рассогласования, первым входом блока выбора оптимального скольжения и первым входом блока вычисления синхронной частоты вращения асинхронного двигателя, причем второй вход блока рассогласования подключен к первому выходу наблюдателя состояния, являющемуся выходом блока вычисления электрической частоты вращения ротора, выход блока рассогласования подключен к входу регулятора напряжения, выход которого подключен ко второму входу блока выбора оптимального скольжения и к первому входу блока расчета оптимального потокосцепления, второй вход которого соединен с выходом блока выбора оптимального скольжения, а третий вход подключен к третьему выходу наблюдателя состояния, являющемуся выходом блока расчета конструктивных параметров, который, кроме того, подключен ко второму входу блока расчета оптимального значения вектора тока статора, первый вход которого соединен с выходом блока расчета оптимального потокосцепления, выход блока расчета оптимального значения вектора тока статора подключен к первому входу блока вычисления токовой ошибки, второй вход которого соединен со вторым выходом наблюдателя состояния, являющимся выходом блока вычисления текущего вектора тока статора, а выход блока вычисления токовой ошибки подключен к первому входу блока выбора вектора напряжения, кроме того, выход блока выбора оптимального скольжения подключен ко второму входу вычисления синхронной частоты вращения асинхронного двигателя, а его выход соединен со вторым входом блока выбора вектора напряжения, выходы которого подключены ко входам блока драйверов, выходы которых соединены с управляющими входами автономного инвертора напряжения, выходы которого соединены с обмотками асинхронного двигателя, а также с первым входом наблюдателя состояния, являющимся входом блока вычисления текущего вектора тока статора, асинхронный двигатель соединен с датчиком текущей частоты вращения асинхронного двигателя, выход которого подключен ко второму входу наблюдателя состояния, являющемуся входом блока вычисления электрической частоты вращения ротора.
Недостатком является сложная структура, большое количество настроечных элементов, что влечет в сложность в настройке и низкую надежность. Наличие датчика сужает диапазон применения. Также эта система не обеспечивает необходимого уровня энергосбережения электропривода.
Техническим результатом является снижение энергопотребления частотно-регулируемого асинхронного электропривода при снижении нагрузок двигателя ниже номинальных.
Технический результат достигается тем, что энергосберегающая система управления асинхронным электроприводом, состоящая из блока ввода заданной частоты вращения асинхронного двигателя, регулятора напряжения, блока драйверов, который своими выходными выводами соединен с входными управляющими выводами автономного инвертора напряжения, который соединен с обмотками асинхронного двигателя, снабжена вычислителем проекций вектора тока статора, вычислителем активного тока статора, умножителями, согласующим усилителем, фильтром, интегратором, вычислителями синуса и косинуса угла поворота вектора напряжения, блоком переключений режимов работы электропривода, блоком широтно-импульсной модуляции и датчиками тока, при этом выходные сигнальные выводы датчиков тока соединены с выходными выводами вычислителя проекций вектора тока статора, который выходными выводами соединен с первым и третьим входным выводом вычислителя активного тока статора, а второй и четвертый входной вывод вычислителя активного тока статора соединен с выходными выводами умножителей, при этом выходной вывод вычислителя активного тока статора соединен со вторым входным выводом умножителем, второй входной вывод которого соединен с выходным выводам блока ввода заданной частоты, а выходной вывод умножителя соединен с входным выводом согласующего усилителя, который своим выходным выводом соединен с входным выводом фильтра, при этом выходной вывод фильтра соединен со вторым входным выводом блока переключения режимов работы электропривода, первые входные выводы умножителей и соединены с выходными выводами вычислителей синуса и косинуса угла поворота вектора напряжения, соответственно, входные выводы которых соединены с выходным выводом интегратора, вторые входные выводы умножителей и соединены с выходным выводом фильтра, интегратор входным выводом соединен с выходным выводом блока ввода заданной частоты, а первый входной вывод блока переключений режимов работы электропривода соединен с выходным выводом регулятора напряжения, входной вывод которого соединен с выходным выводом блока ввода заданной частоты, при этом блок широтно-импульсной модуляции первым и вторым входным выводом соединен с выходным выводом блока переключений режимов работы электропривода и блоком ввода заданной частоты, а выходные выводы блока широтно-импульсной модуляции соединены с входными выводами блока драйверов.
Структурная схема энергосберегающей системы управления асинхронным электроприводом представлена на фиг.1. В энергосберегающую систему управления входят вычислитель проекций вектора тока статора 9, вычислитель активного тока статора 10, умножители 11, 12 и 13, согласующий усилитель 14, фильтр 15, интегратор 16, вычислители синуса 17 и косинуса 18 угла поворота вектора напряжения соответственно, регулятор напряжения 19, блок переключений режимов работы электропривода 20, блок широтно-импульсной модуляции 21, блок ввода заданной частоты 22 и блок драйверов 23. Выпрямителя 2 входными силовыми выводами соединены с трехфазной сетью электроснабжения. Выходными силовыми выводами выпрямитель 2 связан с входными силовыми выводами звена постоянного тока 4, выходные силовые выводы которого соединены с входными силовыми выводами автономного инвертора 3. Выходные силовые выводы соединены со статорной обмоткой асинхронного двигателя 5. В фазы А и С статорной обмотки асинхронного электродвигателя включены датчики тока 7 и 8 соответственно. Выходные сигнальные выводы датчиков тока 7 и 8 соединены с системой управления 6, а именно с выходными выводами вычислителя проекций вектора тока статора 9, который выходными выводами соединен с первым и третьим входным выводом вычислителя активного тока статора 10. Второй и четвертый входной вывод вычислитель активного тока статора 10 соединен с выходными выводами умножителей 12 и 13. Выходной вывод вычислителя активного тока статора 10 соединен со вторым входным выводом умножителем 11, второй входной вывод которого соединен с выходным выводам блока ввода заданной частоты 22. Выходной вывод умножителя 11 соединен с входным выводом согласующего усилителя 14, который своим выходным выводом соединен с входным выводом фильтра 15. Выходной вывод фильтра 15 соединен со вторым входным выводом блока переключения режимов работы электропривода 20. Первые входные выводы умножителей 13 и 12 соединены с выходными выводами вычислителей синуса 17 и косинуса 18 угла поворота вектора напряжения соответственно, входные выводы которых соединены с выходным выводом интегратора 16. Вторые входные выводы умножителей 12 и 13 соединены с выходным выводом фильтра 15. Интегратор 16 входным выводом соединен с выходным выводом блока ввода заданной частоты 22. Первый входной вывод блока переключений режимов работы электропривода 20 соединен с выходным выводом регулятора напряжения 19, входной вывод которого соединен с выходным выводом блока ввода заданной частоты 22. Блок широтно-импульсной модуляции 21 первым и вторым входным выводом соединен с выходным выводом блока переключений режимов работы электропривода 20 и блоком ввода заданной частоты 22. Выходные выводы блока широтно-импульсной модуляции 21 соединены с входными выводами блока драйверов 23, выходные выводы которого соединены с управляющими выводами автономного инвертора 3.
Система работает следующим образом. На входные выводы выпрямителя 2 подают трехфазное переменное напряжение с частотой 50 Гц. На выходных силовых выводах выпрямителя 2 получают постоянное напряжение. С помощью звена постоянного тока 4 сглаживают постоянное напряжение и подают на входные силовые выводы автономного инвертора 3.
С помощью блока ввода заданной частоты 22 устанавливают заданное постоянное значение частоты вращения асинхронного электродвигателя 5. Заданное постоянное значение частоты вращения через регулятор напряжения 19 и на блок переключения режимов работы электропривода 20, который в момент пуска находится в верхнем положении, поступает в блок широтно-импульсной модуляции 21. Также в блок широтно-импульсной модуляции 21 поступает заданное постоянное значение частоты вращения. На основе этих двух сигналов блок широтно-импульсной модуляции 21 формирует управляющие сигналы автономного инвертора 3 и через блок драйверов 23 передает их на него. Асинхронный двигатель 5, находясь в режиме пуска (торможения), начинает разгоняться.
По мере разгона асинхронного электродвигателя 5 увеличивается текущее значение активного тока статора, протекающего в статорных обмотках асинхронного электродвигателя 5. При достижении текущего значения активного тока статора установленного в блоке переключения режимов работы электропривода 20 порогового значения происходит его автоматическое переключение в нижнее положение, и система управления переключается из режима пуска в энергосберегающий режим. В энергосберегающем режиме отслеживают текущее значение активного тока статора и в соответствии с ним формируют оптимальное заданное значение напряжения асинхронного двигателя. Это происходит следующим образом. Заданное постоянное значение частоты вращения поступает в интегратор 16, на выходе которого получают заданное постоянное значение угла поворота вектора напряжения. Этот сигнал поступает в вычислители синуса 17 и косинуса 18 угла поворота вектора напряжения. После этого значение синуса и косинуса угла поворота вектора напряжения поступает на входы умножителей 12 и 13. Также на вход умножителей 12, 13 постает заданное значение напряжения асинхронного двигателя 5. Таким образом, на выходе умножителей 12, 13 формируют текущее значение проекций вектора напряжений. С помощью датчиков тока 7, 8, установленных в фазах А и С, и вычислителя проекций вектора тока статора 9 определяют текущее значение проекций вектора тока. Текущее значение проекций вектора напряжений и текущее значение проекций вектора тока поступают в вычислитель активного тока статора 10. На входные выводы умножителя 11 поступают сигналы с выхода вычислителя активного тока статора 10, текущее значение активного тока статора, и блока ввода заданной частоты 22, заданное постоянное значение частоты вращения. Этот сигнал, проходя через согласующий усилитель 14 и фильтр 15, преобразуется в заданное значение напряжения асинхронного двигателя 5 и поступает в блок переключения режимов работы электропривода 20.
При торможении асинхронного электродвигателя снижается частота вращения и текущее значение активного тока статора. При снижении текущего значения активного тока статора ниже установленного в блоке переключения режимов работы электропривода 20 порогового значения происходит его автоматическое переключение в верхнее положение, и система управления переключается из энергосберегающего режима в режим торможения (пуска).
Таким образом, система управления обеспечивает снижение энергопотребления частотно-регулируемого асинхронного электропривода.
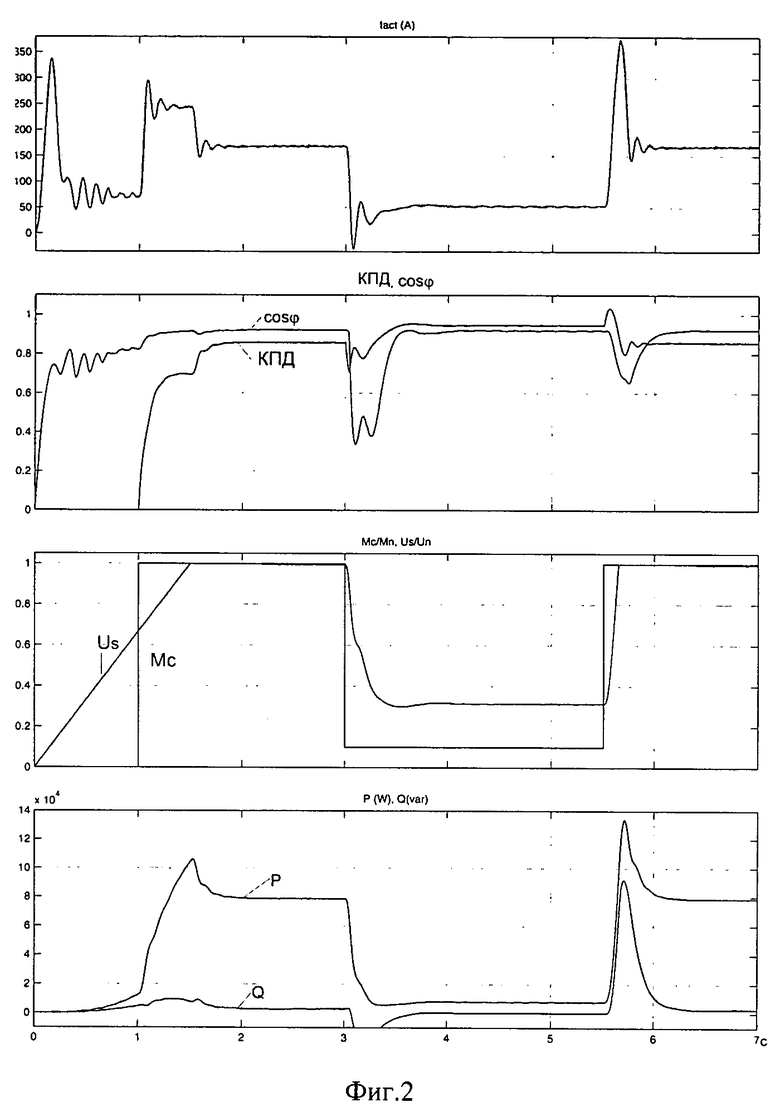
На фиг.2 приведены графики переходных процессов в приводе с энергосберегающей системой управления. Система работает с асинхронным электродвигателем с короткозамкнутым ротором 4A250S4Y3 мощностью 75 кВт, который имеет следующие номинальные параметры: si=0,012; ηi=0,93; cos φi=0,9.
Привод разгоняется за полторы секунды на холостом ходу по закону U/f=const, через одну секунду нагрузка увеличивается до номинального значения. Через 3 c момент падает до значения М=0,1Мн, через 5,5 с момент восстанавливается до номинального значения.
Анализ работы асинхронного электропривода с энергосберегающей системой управления при моменте М=0,1Мн: активная мощность, потребляемая двигателем Р=7,9 кВт, реактивная мощность Q=0,3 кВАр, полная мощность S=7,9 кBA, η=0,94; cos φ=0,92.
Таким образом, в режиме энергосбережения отслеживают потребление активного тока, снижают выходное напряжение инвертора, тем самым снижают потери в двигателе. Система управления обеспечивает поддержание электродвигателя в режиме номинального КПД.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2006 |
|
RU2317632C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| Устройство для управления асинхронным электродвигателем | 1989 |
|
SU1663734A1 |
| Система частотно-регулируемого асинхронного электропривода крано-манипуляторной установки (Система ЧРАП КМУ) | 2023 |
|
RU2820159C1 |
| Частотно-регулируемый электропривод | 1986 |
|
SU1347142A1 |
| Электропривод переменного тока | 1988 |
|
SU1577060A1 |
| СПОСОБ УПРАВЛЕНИЯ АСИНХРОННЫМ ЧАСТОТНО-РЕГУЛИРУЕМЫМ ЭЛЕКТРОПРИВОДОМ С КОРОТКОЗАМКНУТЫМ РОТОРОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2458447C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2023 |
|
RU2819147C1 |
| Устройство для управления асинхронным частотно-регулируемым электродвигателем | 1990 |
|
SU1793526A1 |
| СИСТЕМА УПРАВЛЕНИЯ МАШИНОЙ ДВОЙНОГО ПИТАНИЯ | 1995 |
|
RU2106055C1 |
Изобретение относится к области электротехники и может быть использовано в системах управления электроприводами общепромышленного применения. Технический результат - снижение энергопотребления частотно-регулируемого асинхронного электропривода при снижении нагрузок двигателя ниже номинальных. Энергосберегающая система управления асинхронным электроприводом содержит блок ввода заданной частоты вращения асинхронного двигателя, регулятор напряжения, блок драйверов, автономный инвертор напряжения, вычислитель проекций вектора тока статора, вычислитель активного тока статора, умножители, согласующий усилитель, фильтр, интегратор, вычислители синуса и косинуса угла поворота вектора напряжения, блок переключений режимов работы электропривода, блок широтно-импульсной модуляции и датчик тока, связанные между собой так, как указано в материалах заявки. При этом выходные сигнальные выводы датчиков тока соединены с выходными выводами вычислителя проекций вектора тока статора, который выходными выводами соединен с первым и третьим входным выводом вычислителя активного тока статора, а второй и четвертый входной вывод вычислителя активного тока статора соединен с выходными выводами умножителей. 2 ил.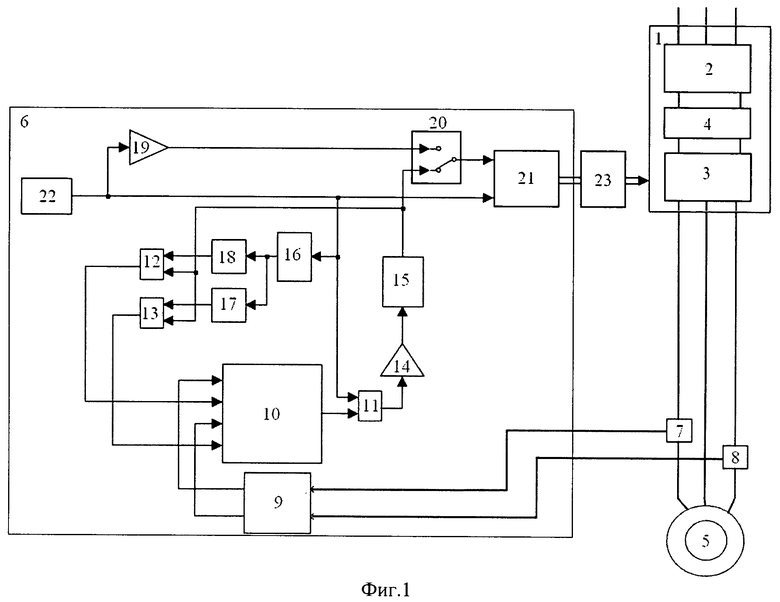
Энергосберегающая система управления асинхронным электроприводом, состоящая из блока ввода заданной частоты вращения асинхронного двигателя, регулятора напряжения, блока драйверов, который своими выходными выводами соединен с входными управляющими выводами автономного инвертора напряжения, который соединен с обмотками асинхронного двигателя, отличающаяся тем, что она снабжена вычислителем проекций вектора тока статора, вычислителем активного тока статора, умножителями, согласующим усилителем, фильтром, интегратором, вычислителями синуса и косинуса угла поворота вектора напряжения, блоком переключений режимов работы электропривода, блоком широтно-импульсной модуляции и датчиками тока, при этом выходные сигнальные выводы датчиков тока соединены с выходными выводами вычислителя проекций вектора тока статора, который выходными выводами соединен с первым и третьим входным выводом вычислителя активного тока статора, а второй и четвертый входной вывод вычислителя активного тока статора соединен с выходными выводами умножителей, при этом выходной вывод вычислителя активного тока статора соединен со вторым входным выводом умножителем, второй входной вывод которого соединен с выходным выводам блока ввода заданной частоты, а выходной вывод умножителя соединен с входным выводом согласующего усилителя, который своим выходным выводом соединен с входным выводом фильтра, при этом выходной вывод фильтра соединен со вторым входным выводом блока переключения режимов работы электропривода, первые входные выводы умножителей соединены с выходными выводами вычислителей синуса и косинуса угла поворота вектора напряжения соответственно, входные выводы которых соединены с выходным выводом интегратора, вторые входные выводы умножителей соединены с выходным выводом фильтра, интегратор входным выводом соединен с выходным выводом блока ввода заданной частоты, а первый входной вывод блока переключений режимов работы электропривода соединен с выходным выводом регулятора напряжения, входной вывод которого соединен с выходным выводом блока ввода заданной частоты, при этом блок широтно-импульсной модуляции первым и вторым входным выводом соединен с выходным выводом блока переключений режимов работы электропривода и блоком ввода заданной частоты, а выходные выводы блока широтно-импульсной модуляции соединены с входными выводами блока драйверов.
| СИСТЕМА УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2008 |
|
RU2390091C1 |
| УСТРОЙСТВО ДЛЯ ВЫБОРА РАЦИОНАЛЬНЫХ РЕШЕНИЙ | 2000 |
|
RU2158955C1 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ДВИГАТЕЛЯ | 2010 |
|
RU2422979C1 |
| Частотно-регулируемый электропривод | 1989 |
|
SU1798884A1 |
| JP 63186578 А, 02.08.1988 | |||
| US 2012009194 А1, 19.04.2009 | |||
| Способ управления труднообрушаемой кровлей в очистных забоях | 1990 |
|
SU1737121A1 |
| WO 1995016302 А1, 15.06.1995. | |||

