Изобретение относится к моделированию электрических систем и может быть использовано в специализированных аналоговых, аналого-цифровых и цифроаналоговых системах для воспроизведения и расчета установившихся и переходных режимов.
Известно устройство для моделирования синхронной электрической машины, содержащее блок вычисления скольжения, тока и напряжения, фильтры, блок вычисления проекции переходной ЭДС электрической машины на поперечную ось ротора [1].
Недостатком устройства является отсутствие трехфазного выходного напряжения и, следовательно, невозможность непосредственного моделирования несимметричных режимов и совместного использования с трехфазными моделями электрических сетей.
Кроме того, принципиальным недостатком устройства является наличие в составе фильтров, снижающих точность моделирования и ограничивающих соответственно их функциональные возможности. Наиболее существенно это проявляется при моделировании пусковых и глубоких асинхронных режимов, то есть режимов, сопровождающихся значительным изменением частоты.
Наиболее близким по совокупности существенных признаков является устройство для моделирования синхронного генератора [2], содержащее генератор импульсов стабильной частоты, сумматор частот, делитель частоты, формирователи импульсов, широтно-импульсные модуляторы, амплитудные модуляторы, фильтры, блок вычисления потокосцепления, усилители, суммирующий усилитель мощности, блок управления.
Однако известное устройство не позволяет моделировать несимметричные режимы, так как является однофазным, а не трехфазным. Кроме того, обусловленное принципом наличие в составе устройства фильтров или исключает возможность моделирования режимов со значительным изменением частоты, например, пусковых или глубоких асинхронных, или вызывает значительные погрешности воспроизведения моделируемых процессов.
Цель изобретения - расширение функциональных возможностей за счет моделирования симметричных и несимметричных режимов и повышение точности моделирования.
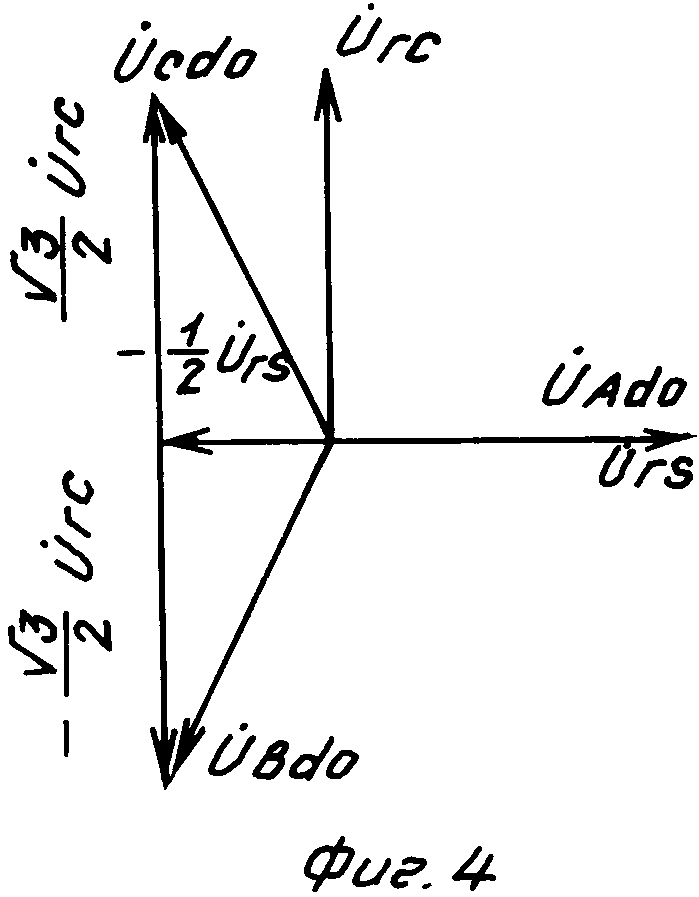
На фиг. 1 представлена блок-схема устройства для моделирования синхронной машины; на фиг. 2 приведена блок-схема используемого в заявляемом устройстве управляемого генератора квадратурных напряжений; на фиг. 3 приведена блок-схема первого и второго блоков формирования трехфазных систем напряжений; на фиг. 4, 5 - соответственно векторные диаграммы, поясняющие принцип действия этих блоков; на фиг. 6 приведена блок-схема первого и второго блоков формирования проекции тока статора.
Устройство для моделирования синхронной машины (фиг. 1) содержит блок 1 вычисления скольжения, генератор 2 квадратурных напряжений, первый блок 3 формирования трехфазных систем напряжений, второй блок 4 формирования трехфазных систем напряжений, первый суммирующий усилитель 5 мощности, второй и третий суммирующие усилители 6, 7 мощности, датчики 8-10 тока, первый и второй блоки 11, 12 формирования проекций тока статора, блок 13 вычисления потокосцеплений.
Управляемый генератор квадратурных напряжений (фиг. 2) содержит управляемый интегратор 14, первый квадратор 15, управляемый суммирующий интегратор 16, инвертор 17, второй квадратор 18, сравнивающий усилитель 19, сумматор 20.
Каждый блок формирования трехфазных систем напряжений (фиг. 3) включает три амплитудных модулятора 21-23, первый и второй сумматоры 24, 25, инвертор 26.
Каждый из блоков формирования проекций тока статора (фиг. 6) содержит три амплитудных модулятора 27-29, сумматор 30. Кроме того, управляемый генератор 2 включает перемножители 31.
Устройство для моделирования синхронной машины работает следующим образом.
При включении напряжения питания устройства на первом и втором выходах управляемого генератора 2 квадратурных напряжений, выполненного, например, по схеме фиг. 2, формируются в результате моделирования дифференциального уравнения синусоидальных колебаний: = -2γ
= -2γ  - f
- f
fo = 1/2 π RC - резонансная частота,
соответственно напряжения  = Urm sin (ω t + β) и
= Urm sin (ω t + β) и  = Urm cos (ωr t + β) ,идентифицируемые соответственно с продольной d и поперечной q осями синхронной машины. Управление частотой генерируемых квадратурных напряжений
= Urm cos (ωr t + β) ,идентифицируемые соответственно с продольной d и поперечной q осями синхронной машины. Управление частотой генерируемых квадратурных напряжений  и
и  осуществляется величиной управляющего напряжения Uy= ωr на выходе генератора 2 квадратурных напряжений путем регулирования, например, с помощью аналоговых перемножителей 31, сигналов на информационных входах управляемого интегратора 14 и управляемого суммирующего интегратора 16, что эквивалентно регулированию постоянных времени RC этих интеграторов.
осуществляется величиной управляющего напряжения Uy= ωr на выходе генератора 2 квадратурных напряжений путем регулирования, например, с помощью аналоговых перемножителей 31, сигналов на информационных входах управляемого интегратора 14 и управляемого суммирующего интегратора 16, что эквивалентно регулированию постоянных времени RC этих интеграторов.
Задание амплитуды Urm генерируемых квадратурных напряжений  и
и  устанавливается опорным напряжением Uo на одном из входов сравнивающего усилителя 19. Постоянство заданной Urm обеспечивается безынерционным контуром регулирования амплитуды, содержащим два квадратора 15, 18, например, на базе аналоговых перемножителей, сумматор 20 и сравнивающий усилитель 19. Принцип действия контура основан на безынерционном преобразовании квадратурных гармонических напряжений в напряжение постоянного тока в соответствии с известным тригонометрическим выражением:
устанавливается опорным напряжением Uo на одном из входов сравнивающего усилителя 19. Постоянство заданной Urm обеспечивается безынерционным контуром регулирования амплитуды, содержащим два квадратора 15, 18, например, на базе аналоговых перемножителей, сумматор 20 и сравнивающий усилитель 19. Принцип действия контура основан на безынерционном преобразовании квадратурных гармонических напряжений в напряжение постоянного тока в соответствии с известным тригонометрическим выражением:
[Urmsin (ωr t + β)]2 + [Urm cos (ωr t + β)]2 =
= Urm2 [sin2 (ωr t + β) + cos2 (ωr t + β)] = Urm2 (2) Результат преобразования, осуществляемый с помощью квадраторов 15, 18 и сумматора 20, сравнивается в сравнивающем усилителе 19 с напряжением постоянного тока Uo, устанавливаемым пропорциональным квадратному корню номинального статорного напряжения синхронной машины. Усиленное сравнивающим усилителем 19 напряжение рассогласования с его выхода поступает на один из управляющих входов управляемого суммирующего интегратора 16. В результате осуществляется автоматическое регулирование стабилизирующего амплитуду генерируемых напряжений сигнала обратной связи с выхода инвертора 17 на соответствующий указанному управляющему входу информационный вход управляющего суммирующего интегратора 16. В результате поддерживается на требуемом уровне затухание γ и, следовательно, стабильность амплитуды Urm генерируемых квадратурных напряжений  , поступающих на соответствующие входы блоков формирования трехфазных систем напряжений 3, 4 (фиг. 3), и
, поступающих на соответствующие входы блоков формирования трехфазных систем напряжений 3, 4 (фиг. 3), и  , поступающих на соответствующие входы блоков формирования трехфазных систем напряжений 3, 4. В этих блоках 3, 4 напряжения
, поступающих на соответствующие входы блоков формирования трехфазных систем напряжений 3, 4. В этих блоках 3, 4 напряжения  и
и  поступают на входы сумматоров 24, 25 и инвертора 26, с помощью которых согласно диаграммам (фиг. 4, 5) на четвертых, пятых и шестых выходах формируются опорные трехфазные системы напряжений:
поступают на входы сумматоров 24, 25 и инвертора 26, с помощью которых согласно диаграммам (фиг. 4, 5) на четвертых, пятых и шестых выходах формируются опорные трехфазные системы напряжений: do=UгmSin(ωгt+β),
do=UгmSin(ωгt+β), do=
do= Sin(ωгt+β-2Π/3),
Sin(ωгt+β-2Π/3), do= UгmSin(ωгt+β+
do= UгmSin(ωгt+β+  ), ориентированная относительно продольной оси d синхронной машины (фиг. 4) - на указанных выходах первого блока 3, и
), ориентированная относительно продольной оси d синхронной машины (фиг. 4) - на указанных выходах первого блока 3, и qo=UгmCos(ωгt+β),
qo=UгmCos(ωгt+β), qo=UгmCos(ωгt+β-
qo=UгmCos(ωгt+β-  ),
), qo=
qo=  Cos(ωгt+β+
Cos(ωгt+β+  ), ориентированная относительно поперечной оси q синхронной машины (фиг. 5) - на указанных выходах второго блока 4. Причем четвертый выход блока 3 является одновременно и его первым входом, на который с первого выхода управляемого генератора 2 квадратурных напряжений подается напряжение
), ориентированная относительно поперечной оси q синхронной машины (фиг. 5) - на указанных выходах второго блока 4. Причем четвертый выход блока 3 является одновременно и его первым входом, на который с первого выхода управляемого генератора 2 квадратурных напряжений подается напряжение  , являющееся вместе с этим и напряжением
, являющееся вместе с этим и напряжением  do (фиг. 3, 4). Четвертый выход блока 4 является также его первым входом, на который с второго выхода управляемого генератора 2 квадратурных напряжений подается напряжение
do (фиг. 3, 4). Четвертый выход блока 4 является также его первым входом, на который с второго выхода управляемого генератора 2 квадратурных напряжений подается напряжение  , являющееся одновременно и напряжением
, являющееся одновременно и напряжением  qo (фиг. 3, 5). Пятым выходом блока 4, на котором формируется напряжение
qo (фиг. 3, 5). Пятым выходом блока 4, на котором формируется напряжение  qo, и шестым выходом блока 3, на котором формируется
qo, и шестым выходом блока 3, на котором формируется  do, является выход сумматора 25, с помощью которого и инвертора 26 согласно диаграммам (фиг. 4, 5) формируются
do, является выход сумматора 25, с помощью которого и инвертора 26 согласно диаграммам (фиг. 4, 5) формируются  qo и
qo и  do. Шестым выходом блока 4, на котором формируется
do. Шестым выходом блока 4, на котором формируется  qo, и пятым выходом блока 3, на котором формируется
qo, и пятым выходом блока 3, на котором формируется  do, является выход сумматора 24, с помощью которого согласно диаграммам (фиг. 4, 5) осуществляются эти формирования. Кроме этого, как следует из фиг. 3, на третьи входы блоков 3 и 4 поступают соответственно с первого и второго выходов блока 13 вычисления потокосцеплений продольная Ud и поперечная Uq составляющие напряжения статора машины, полученные в блоке 13 путем моделирования уравнений:
do, является выход сумматора 24, с помощью которого согласно диаграммам (фиг. 4, 5) осуществляются эти формирования. Кроме этого, как следует из фиг. 3, на третьи входы блоков 3 и 4 поступают соответственно с первого и второго выходов блока 13 вычисления потокосцеплений продольная Ud и поперечная Uq составляющие напряжения статора машины, полученные в блоке 13 путем моделирования уравнений:
Ud= -  +Ψq+Ψq
+Ψq+Ψq - Id·ra, (3)
- Id·ra, (3)
Uq= -  +Ψd+Ψd
+Ψd+Ψd - Iq·ra, (4), где ϑd и ϑg - потокосцепления соответственно по продольной и поперечной осям машины;
- Iq·ra, (4), где ϑd и ϑg - потокосцепления соответственно по продольной и поперечной осям машины; и
и  - cоответствующие трансформаторные ЭДС;
- cоответствующие трансформаторные ЭДС; - частота скольжения машины;
- частота скольжения машины;
Id и Iq - соответственно продольный и поперечный токи статора;
ra - активное сопротивление обмотки статора.
Согласно фиг. 3, третий вход блоков 3 и 4 образован путем объединения первых входов амплитудных модуляторов 21-23, на вторые входы которых подаются соответственно составляющие опорной трехфазной системы напряжений:  do,
do,  do,
do,  do - в блоке 3 и
do - в блоке 3 и  qo,
qo,  qo,
qo,  qo - в блоке 4, формируемые, как уже отмечалось, в этих же блоках. Поэтому напряжения: Ud - в блоке 3 и Uq - в блоке 4 являются сигналами, посредством которых осуществляется модуляция опорных трехфазных систем напряжений:
qo - в блоке 4, формируемые, как уже отмечалось, в этих же блоках. Поэтому напряжения: Ud - в блоке 3 и Uq - в блоке 4 являются сигналами, посредством которых осуществляется модуляция опорных трехфазных систем напряжений:  do,
do,  do,
do,  do и
do и  qo,
qo,  qo,
qo,  qo соответственно.
qo соответственно.
В результате модуляции напряжением Ud опорной трехфазной системы напряжений:  do,
do,  do,
do,  do в блоке 3 (фиг. 3) на первом, втором и третьем выходах его, являющихся выходами амплитудных модуляторов 21-23, формируется трехфазная система продольных проекций фазных напряжений:
do в блоке 3 (фиг. 3) на первом, втором и третьем выходах его, являющихся выходами амплитудных модуляторов 21-23, формируется трехфазная система продольных проекций фазных напряжений: =UAdmSin(ωгt+β),
=UAdmSin(ωгt+β), =UBdmSin(ωгt+β-
=UBdmSin(ωгt+β-  ),
), = UCdmSin(ωгt+β+
= UCdmSin(ωгt+β+  ), в результате модуляции напряжением Uq опорной трехфазной системы напряжений:
), в результате модуляции напряжением Uq опорной трехфазной системы напряжений:  qo,
qo,  qo,
qo,  qo в блоке 4 (фиг. 3) на первом, втором и третьем выходах его, являющихся выходами амплитудных модуляторов 21-23, формируется трехфазная система поперечных проекций фазных напряжений:
qo в блоке 4 (фиг. 3) на первом, втором и третьем выходах его, являющихся выходами амплитудных модуляторов 21-23, формируется трехфазная система поперечных проекций фазных напряжений: =UAqmcos(ωгt+β),
=UAqmcos(ωгt+β), =UBqmcos(ωгt+β-
=UBqmcos(ωгt+β-  ),
), =UCqmcos(ωгt+β+
=UCqmcos(ωгt+β+  ). Проекции
). Проекции  и
и  суммируются с помощью суммирующего усилителя 5 мощности,
суммируются с помощью суммирующего усилителя 5 мощности,  и
и  суммируются с помощью суммирующего усилителя 6 мощности, а
суммируются с помощью суммирующего усилителя 6 мощности, а  и
и  суммируются с помощью суммирующего усилителя 7 мощности. При этом на выходах суммирующих усилителей 5-7 мощности, выведенных через датчики 8-10 тока, формируются напряжения фаз синхронной машины:
суммируются с помощью суммирующего усилителя 7 мощности. При этом на выходах суммирующих усилителей 5-7 мощности, выведенных через датчики 8-10 тока, формируются напряжения фаз синхронной машины:  =
= Sin(ωгt+ϕ),
Sin(ωгt+ϕ), =
= Sin(ωгt+ϕ-
Sin(ωгt+ϕ-  ),
), =
= Sin(ωгt+ϕ+
Sin(ωгt+ϕ+  ).
).
параллельно этому напряжения опорной трехфазной системы: ,
,  do с четвертого, пятого, шестого выходов первого блока 3 формирования трехфазных систем напряжений поступают на аналогичные входы первого блока 11 формирования проекций тока статора (фиг. 6), являющиеся первыми входами модуляторов 27-29 соответственно. На первый, второй, третий входы блока 11, являющиеся соответственно вторыми входами тех же модуляторов, с информационных выходов датчиков 8-10 тока подаются напряжения
do с четвертого, пятого, шестого выходов первого блока 3 формирования трехфазных систем напряжений поступают на аналогичные входы первого блока 11 формирования проекций тока статора (фиг. 6), являющиеся первыми входами модуляторов 27-29 соответственно. На первый, второй, третий входы блока 11, являющиеся соответственно вторыми входами тех же модуляторов, с информационных выходов датчиков 8-10 тока подаются напряжения =
= Sin(ωгt+α),
Sin(ωгt+α), =
= Sin(ωгt+αo-
Sin(ωгt+αo-  ),
), = UiCmSin(ωгt+α+
= UiCmSin(ωгt+α+  ), пропорциональные токам нагрузки фаз синхронной машины:
), пропорциональные токам нагрузки фаз синхронной машины:  ≡ iA,
≡ iA,  ≡ iB,
≡ iB,  ≡ ic. Вследствие модуляции этими напряжениями соответственно напряжений:
≡ ic. Вследствие модуляции этими напряжениями соответственно напряжений:  do,
do,  do,
do,  do и суммирования выходных напряжений модуляторов 27-29 с помощью сумматора 30 на его выходе, являющемся выходом блока 11, формируется напряжение:
do и суммирования выходных напряжений модуляторов 27-29 с помощью сумматора 30 на его выходе, являющемся выходом блока 11, формируется напряжение:
UId=  [Uimsin(ωгt+α)·Uгmsin(ωгt+β)+Uimsin(ωгt+α-
[Uimsin(ωгt+α)·Uгmsin(ωгt+β)+Uimsin(ωгt+α-  )× (5)
)× (5)
×Uгmsin(ωгt+β-  )+Uimsin(ωгt+α+
)+Uimsin(ωгt+α+  )·Uгmsin(ωгt+β+
)·Uгmsin(ωгt+β+  ), где Uimsin(ωгt+α)=
), где Uimsin(ωгt+α)= , Uгmsin(ωгt+β)=
, Uгmsin(ωгt+β)= do,
do,
Uimsin(ωгt+α-  )=
)= ,
,  sin(ωгt+β-
sin(ωгt+β-  )=
)= do,
do,
Uimsin(ωгt+α+  )=
)=  , Uгmsin(ωгt+β+
, Uгmsin(ωгt+β+  )=
)= do, пропорциональное продольному току статора UId = Id. Одновременно с этим с четвертого, пятого, шестого выходов второго блока 4 формирования трехфазных систем напряжений напряжения опорной трехфазной системы
do, пропорциональное продольному току статора UId = Id. Одновременно с этим с четвертого, пятого, шестого выходов второго блока 4 формирования трехфазных систем напряжений напряжения опорной трехфазной системы  ,
,  ,
,  подаются на аналоговые входы второго блока формирования, проекций тока статора 12, в котором (фиг. 6) точно так же, как и в блоке 11, формируется на его выходе напряжение
подаются на аналоговые входы второго блока формирования, проекций тока статора 12, в котором (фиг. 6) точно так же, как и в блоке 11, формируется на его выходе напряжение
UIq=  [Uimsin(ωгt+α)·Uгmcos(ωгt+β)+Uimsin(ωгt+α-
[Uimsin(ωгt+α)·Uгmcos(ωгt+β)+Uimsin(ωгt+α-  )× (6)
)× (6)
×Uгmcos(ωгt+β-  )+Uimsin(ωгt+α+
)+Uimsin(ωгt+α+  )·Uгmcos(ωгt+β+
)·Uгmcos(ωгt+β+  ), где Uгmcos(ωгt+β)=
), где Uгmcos(ωгt+β)= qo,
qo,
Uгmcos(ωгt+β-  )=
)= qo,
qo,
Uгmcos(ωгt+β+  )=
)= qo, пропорциональное поперечному току статора UIg = Iq. Напряжения UId и UIqподаются соответственно на первые и вторые входы блока 13 вычисления потокосцеплений и блока 1 вычисления скольжения. При этом в блоке 13 осуществляется моделирование системы уравнений:
qo, пропорциональное поперечному току статора UIg = Iq. Напряжения UId и UIqподаются соответственно на первые и вторые входы блока 13 вычисления потокосцеплений и блока 1 вычисления скольжения. При этом в блоке 13 осуществляется моделирование системы уравнений: = Ufd-ifd·rfd, (7)
= Ufd-ifd·rfd, (7) =
= , (8)
, (8) =-iD1·rD1, (9)
=-iD1·rD1, (9) =-iQ1·rQ1, (10)
=-iQ1·rQ1, (10) =-iD2·rD2, (11)
=-iD2·rD2, (11) =-iQ2·rQ2, (12)
=-iQ2·rQ2, (12)
Ed= Ψfd- ifd· Xσfd, (13)
Eq= Ψfq- ifq· Xσfq, (14)
iD1=  -
-  , (15)
, (15)
iQ1=  -
-  , (16)
, (16)
iD2=  -
-  , (17)
, (17)
iQ2=  -
-  , (18)
, (18)
ifd=  - Id-iD1-iD2, (19)
- Id-iD1-iD2, (19)
ifq=  - Iq-iQ1-iQ2, (20)
- Iq-iQ1-iQ2, (20)
Ψd= Ed- Id·Xσd, (21)
Ψq= Eq- Iq·Xσq, (22) где ϑ - потокосцепление;
U - напряжение;
Е - ЭДС;
i, I - токи;
r - активное сопротивление;
Х - реактивное сопротивление;
К - коэффициент, учитывающий насыщение генератора, зависящий от величины E;
индексы: d, D и q, Q идентифицированы соответственно с продольной и поперечной осями d, q синхронной машины, D и Q, кроме этого, еще и с демпферными контурами, f индекс идентифицирован с контуром возбуждения, а α - со статором синхронной машины; индекс σ идентифицирован с магнитным рассеянием.
Сформированные в блоке 13 потокосцепления ϑd и ϑq подаются на третий и четвертый входы блока 1, где происходит моделирование уравнения движения ротора синхронной машины =
=  Mт-
Mт-  Iq-
Iq-  I
I -
- 
 , (23) где δ - угол сдвига ЭДС синхронной машины по отношению к оси, вращающейся с синхронной скоростью;
, (23) где δ - угол сдвига ЭДС синхронной машины по отношению к оси, вращающейся с синхронной скоростью;
Мт - момент турбины;
Рd - коэффициент демпфирования;
Тj - постоянная инерция ротора синхронной машины.
Получаемое в процессе решения уравнения (23) напряжение, пропорциональное частоте скольжения d δ/dt, с второго выхода блока 1 подается на третий вход блока 13, в котором используется для моделирования уравнений (3), (4). Формируемое в процессе решения уравнения (23) напряжение, пропорциональное частоте вращения ротора синхронной машины ωг=ωс+  , где ωс = const - синхронная частота вращения, с первого выхода блока 1 подается на вход управляемого генератора 2 квадратурных напряжений для управления частотой генерируемых квадратурных напряжений:
, где ωс = const - синхронная частота вращения, с первого выхода блока 1 подается на вход управляемого генератора 2 квадратурных напряжений для управления частотой генерируемых квадратурных напряжений: и
и  и, следовательно, частотой выходных напряжений синхронной машины:
и, следовательно, частотой выходных напряжений синхронной машины:  ,
,  ,
,  .
.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОПРИВОД КОЛЕБАТЕЛЬНОГО ДВИЖЕНИЯ С РЕГУЛИРУЕМЫМ ЗАКОНОМ КОЛЕБАНИЙ | 1993 |
|
RU2072621C1 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2006 |
|
RU2317632C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2010 |
|
RU2438229C1 |
| Устройство для вычисления располагаемой реактивной мощности синхронной машины | 1985 |
|
SU1381544A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2012 |
|
RU2483421C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2012 |
|
RU2483422C1 |
| Устройство для моделированияСиНХРОННОгО гЕНЕРАТОРА | 1979 |
|
SU805360A1 |
| Устройство для моделирования электромагнитных процессов в асинхронных машинах | 1989 |
|
SU1681315A1 |
| Амплитудно-фазовый анализатор гармоник периодических напряжений | 1986 |
|
SU1396081A1 |
| ЭНЕРГОСБЕРЕГАЮЩАЯ СИСТЕМА УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ | 2012 |
|
RU2498496C1 |





Изобретение относится к моделированию электрических систем и может быть использовано в специализированных аналоговых, аналого-цифровых и цифроаналоговых системах для воспроизведения и расчета установившихся и переходных режимов. Цель изобретения - расширение функциональных возможностей за счет моделирования симметричных и несимметричных режимов и повышение точности моделирования. Для достижения цели в устройство введены управляемый генератор квадратурных напряжений, два блока формирования трехфазных систем напряжений, два суммирующих усилителя, три датчика тока, два блока формирования проекции тока статора. 3 з.п. ф-лы, 6 ил.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для моделированияСиНХРОННОгО гЕНЕРАТОРА | 1979 |
|
SU805360A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
