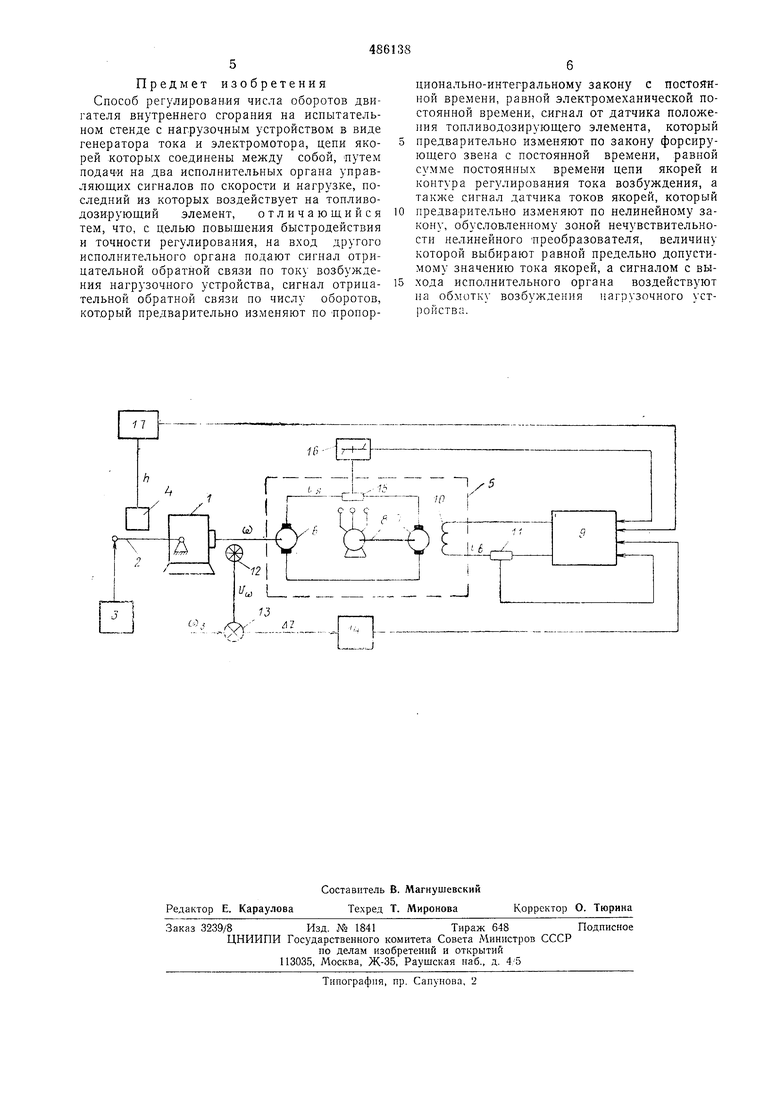
возбуждения 10, электродвигателя 7 с датчиком тока возбуждения 11. Во второй (внешний) контур входят измеритель оборотов 12, суммирующее устройство 13, блок 14, обеспечивающий ПИ-закон регулирования.
Кроме того, в систему регулирования оборотов входят датчик 15 тока якорей нагрузочного устройства, преобразователь 16 и формирующее звеНО 17.
Схема работает следующим образом.
Для изменения режима работы по величине нагрузки на исполнительный орган 3 подают управляющий сигнал. При этом происходит перемещение топливодозирующего органа 2 и изменение нагрузки пропорционально поступивщему сигналу.
Изменение режима работы по числу оборотов осуществляют путем изменения величины задания (соз). При этом на выходе суммирующего устройства 13 второго (внещнего) контура появляется сигнал рассогласования (AZ), равный разности заданного (соз) и действительного (Uo, ) значений числа оборотов. Сигнал рассогласования AZ поступает на вход блока 14, обрабатывающего сигнал по ПИ-закону регулирования. Выходной сигнал блока 14 является задающим для первого (внутреннего) контура, в котором осуществляется пропорциональный закон регулирования тока возбуждения обмотки 10 электродвигателя 7, причем коэффициент передачи исполнительного орган а 9 выбирают таким, чтобы скомпенсировать инерционность обмотки возбуждения 10. Этим достигается оптимальная настройка внутреннего контура, обеспечивающая больщое быстродействие внутреннего контура при малом перерегулировании. Оптимально настроенный внутренний контур имеет постоянную времени, которая является постоянной времени контура регулиравания тока возбуждения.
Таким образом, при появлении сигнала рассогласования происходит изменение с больщИМ быстродействием тока возбуждения (/в) обмотки 10, тока якорей нагрузочного устройства и момента на валу генератора 6.
Изменение последнего приводит к соответствующему изменению числа оборотов, а следовательно, к уменьшению сигнала рассогласования AZ.
В связи с тем, что во втором (внешнем) контуре блок 14 обеспечивает ПР1-закон регулирования, переходный процесс продолжается до тех пор, noiKa сигнал Az не станет равным нулю. Этим обеспечивается пеобходимая точность регулирования.
Кроме того, постоянную времени блока 14 выбирают равной электродмеханической постоянной времени, обусловленной вращающимися массаМИ двигателя 1 и генератора 6. Указанные нараметры блока 14 обеспечивают оптимальную настройку второго (внещнего) контура по быстродействию и точности регулирования.
С целью защиты- нагрузочного устройства от перегрузок предусмотрена обратная связь по току якорей (in), воздействие которой осуществляется следующим образом. Сигнал от датчика 15 тока якорей поступает на преобразователь 16, обеспечивающий нелинейный закон изменения сигнала, обусловленный зоной нечувствительности, которая выбирается равной предельно допустимому зна-чению тока якорей ()При сигнал на выходе преобразователя 16 практически равен нулю и воздействие по току якоря отсутствует. При больщих управляющих воздействиях
значительно увеличиваются AZ, /в и гя.
При гя -я„д сигнал на выходе преобразователя 16 не равен нулю и изменяется пропорционально изменению /яКоэффициент усиления пропорциональной части характеристики преобразователя 16 выбирается таким, чтобы его сигнал при обеспечил прекращение дальнейщего увеличения /яТаким образОМ, при больщих управляющих воздействиях, когда имеются значительные отличия действительных и заданных значений скорости вращения (величина AZ больщая), нроисходит увеличение тока якоря /я. а следовательно, и момента на валу генератора до предельно допустимой величины.
Под воздействием этого .момента происходит .максимально возможное изменение скорости вращения, что приводит к быстрому
уменьщению значения AZ. При определенном значении AZ ток якорей нагрузочного устройства становится меньще предельно допустимого значения. Сигнал на выходе преобразователя 16 становится равным нулю, воздействие обратной связи по току якорей прекраН1,ается.
Для обеспечения инвариантности системы регулирования числа оборотов и нагрузки сигнал от датчика положения топливодозирующего органа 4 подают к форсирующему звену 17, а затем на вход исполнительного органа оборотов 9.
Постоянную времени форсирующего звена 17 выбирают равной сумме постоянных времени цепи якорей нагрузочного устройства и контура регулирования тока возбуждения нагрузочного устройства. Это позволяет при изМ€нении положения топливодозирующего органа получить одновременное и равное измененне крутяпхего мо.мента на валу двигателя 1 и .момента сопротивления на валу генератора 6. Такое рещение обеспечивает инвариантность регулирования числа оборотов и нагрузки.
Таким образом, оптимизация внутреннего и внещнего контуров обеспечивает оптимизацию переходного процесса но быстродействию, перерегулированию и точности, что дает возможность исследовать двигатель на нестационарных режимах работы.
Предмет изобретения Способ регулирован-ия числа оборотов двигателя внутреннего сгорания на иенытательном стенде с нагрузочным устройством в виде генератора тока и электромотора, цепи якорей которых соединены между собой, путем подачИ на два исполнительных органа управляющих сигналов по скорости и нагрузке, последний из которых воздействует на топливодозирующий элемент, отличающийся тем, что, с целью повыщения быстродействия и точности регулирования, на вход другого исполнительного органа подают сигнал отрицательной обратной связи по току возбуждения нагрузочного устройства, сигнал отрицательной обратной связи по числу оборотов, который предварительно изменяют по пропорционально-интегральному закону с постоя-нной времени, равной электромеханической постоянной времени, сигнал от датчика положения топливодозирующего элемента, который предварительно изменяют по закону форсирующего звена с постоянной времени, равной сумме постоянных времени цепи якорей и контура регзлирования тока возбуждения, а также сигнал датчика токов якорей, который предварительно изменяют по нелинейному закону, обусловленному зоной нечувствительности нелинейного преобразователя, величину которой выбирают равной предельно допустимому значению тока якорей, а сигналом с выхода исполнительного органа воздействуют на обмотку возбуждения нагрузочного устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ регулирования скорости вращения двигателя внутреннего сгорания на испытательном стенде | 1979 |
|
SU873008A1 |
| Стенд для испытания двигателя внутреннего сгорания | 1979 |
|
SU859851A1 |
| Устройство для автоматического управления двигателем внутреннего сгорания на стенде | 1983 |
|
SU1139874A1 |
| Регулятор частоты вращения двигателя внутреннего сгорания | 1983 |
|
SU1105673A1 |
| Электропривод для подъемной машины | 1983 |
|
SU1159138A1 |
| Регулятор частоты вращения вала энергетической установки | 1989 |
|
SU1740734A1 |
| Регулятор напряжения для электрических машин | 1979 |
|
SU902196A1 |
| Система автоматического управления | 1985 |
|
SU1409964A1 |
| Устройство для автоматического управления обкаткой двигателя внутреннего сгорания на испытательном стенде | 1983 |
|
SU1125398A1 |
| Стенд для испытания дизельного двигателя | 1984 |
|
SU1310669A1 |
