со С
| название | год | авторы | номер документа |
|---|---|---|---|
| Регулятор частоты вращения вала дизель-генератора | 1987 |
|
SU1442685A1 |
| Автономная электроэнергетическая установка | 1987 |
|
SU1467731A1 |
| Автономная дизель-электрическая установка | 1987 |
|
SU1467732A1 |
| Автономная дизель-электрическая станция | 1988 |
|
SU1539954A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2414048C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2016 |
|
RU2628757C1 |
| Тепловой измеритель количества молока | 1990 |
|
SU1783303A1 |
| Электронный регулятор частоты вращения дизель-генератора с турбокомпрессором | 1985 |
|
SU1332052A1 |
| Система автоматического регулирования осевой нагрузки частоты вращения | 1990 |
|
SU1719122A1 |
| Устройство электропитания с компенсацией искажений токов и напряжений системы электропитания | 1987 |
|
SU1576979A1 |
Использование: энергомашиностроение и автономные электроэнергетические установки. С целью повышения быстродействия регулирования в состав регулятора введены преобразователь 9 напряжение генератора 8, источник 10 опорного напряжения и пороговый коммутатор 11 обеспечивающие формирование управляющего воздействия через сумматор 5, усилитель-ограничитель 6 и исполнительный орган 7 на рейкутопливного насоса приводного двигателя генератора 2. Причем управляющее воздействие формируется как по отклонению частоты вращения датчика 1, кинематически связанного с валом приводного двигателя 2, так и по отклонению напряжения генератора 8. При незначительных изменениях нагрузки регулирование осуществляется по линейному закону, при значительных изменениях нагрузки - по релейному закону, что обеспечивает экстремальные значения подачи топлива в отдельных фазах переходного процесса 5 ил.
| 1 о
vj
GJ
Изобретение относится к энергомашиностроению, в частности к системам автоматического регулирования энергетическими установками, и может быть исполь- зовано для регулирования частоты вращения вала дизель-генератора.
Известны системы стабилизации частоты установок с синхронными генераторами, которые содержат центробежные и электронные регуляторы с постоянным задающим воздействием. Эти системы выполнены в виде контуров стабилизации частоты вращения вала двигателей внутреннего сгорания.
Недостатком таких устройств является низкое быстродействие в переходных режимах.
Наиболее близкой к изобретению является система, содержащая измеритель частоты вращения, задающее устройство сумматор, формирователь сигнала управления, усилитель мощности и исполнительное устройство подачи энергоносителя, образующие контур регулирования по отклонению частоты, датчик активной нагрузки и формирователь импульса сброса-наброса нагрузки, образующие контур регулирования по возмущению. Управление в переходном пережиме исполнительным органом подачи энергоносителя осуществляется суммарным сигналом контура регулирования по отклонению частоты и канала регулирования по возмущению.
Недостатком прототипа является низкое быстродействие при значительных на- бросах (сбросах) нагрузки. Это обусловлено тем, что в прототипе реализован пропорциональный закон формирования управляющего воздействия.
Цель изобретения - повышение быстродействия.
Указанная цель достигается тем, что в известное устройство, содержащее датчик частоты вращения, кинематически связанный с валом приводного двигателя, датчик активной нагрузки, задатчик напряжения, сумматор, усилитель-ограничитель и исполнительный орган, выход которого соединен с рейкой топливного насоса приводного двигателя генератора, причем выход сумматора соединен с входом усилителя-ограничителя, выход которого соединен с входом исполнительного органа, выход задатчика напряжения соединен с первым неинвертирующим входом сумматора, второй инвертирующий вход которого соединен с выходом датчика частоты, дополнительно введены преобразователь напряжения генератора, источник опорного напряжения и пороговый коммутатор, причем выход датчика активной нагрузки соединен с первым входом порогового коммутатора, второй вход которого соединен с выходом источника опорного напряжения, выход порогового
коммутатора соединен с третьим неинвертирующим входом сумматора, четвертый инвертирующий вход которого соединен с выходом преобразователя напряжения, соединенного с выходом генератора.
0Нафиг.1 представлена функциональная
схема регулятора; на фиг.2 - статические характеристики датчика активной нагрузки и датчика частоты вращения; на фиг.З - статическая характеристика усилителя-ограни5 чителя; на фиг.4 - вариант исполнения исполнительного органа; на фиг.5 - временные диаграммы сигналов на выходах отдельных элементов регулятора.
Регулятор частоты вращения вала энер0 гетической установки содержит датчик 1 частоты вращения, кинематически связанный с валом приводного двигателя 2, датчик 3 активной нагрузки, задатчик 4 напряжения, сумматор 5, усилитель-ограничитель 6 и ис5 полнительный орган 7, выход которого соединен с рейкой топливного насоса приводного двигателя 2 генератора 8, причем выход сумматора 5 соединен с входом усилителя-ограничителя 6, выход которого
0 соединен с входом исполнительного органа 7. выход задатчика 4 напряжения соединен с первым неинвертирующим входом сумматора 5. второй инвертирующий вход которого соединен с выходом датчика 1 частоты. В
5 состав регулятора входят также преобразователь 9 напряжения генератора, источник 10 опорного напряжения и пороговый коммутатора 11, причем выход датчика 3 активной нагрузки соединен с первым входом
0 порогового коммутатора 11, второй вход которого соединен с выходом источника 10 опорного напряжения, выход порогового коммутатора 11 соединен с третьим неинвертирующим входом сумматора 3, четвер5 тый инвертирующий вход которого соединен с выходом преобразователя 9 напряжения, соединенного с выходом генератора 8.
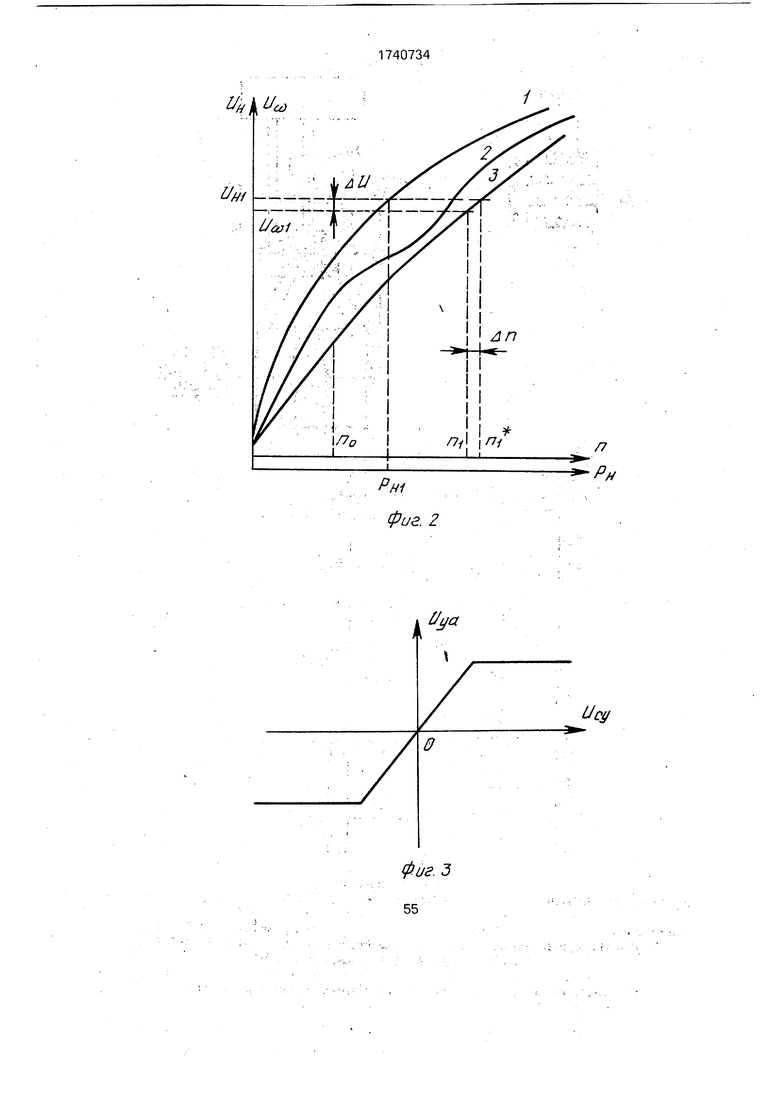
На фиг.2 приведена статическая харак0 теристика датчика активной нагрузки в виде зависимости UH f(PH) (кривая 1), где Ун - выходной сигнал датчика; Рн - активная мощность. В качестве датчика активной нагрузки используется трехфазная схема,
5 выполненная по принципу амплитудно-фазового компаундирования с учетом фазы и амплитуды токов и напряжений.
На фиг.2 приведены статические характеристики датчика частоты вращения (кривые 3, 2 на фиг.2). Датчик совмещает в себе
две функции: функцию датчика частоты вращения и функцию задатчика оптимальной зависимости между нагрузкой и частотой вращения. Оптимальные зависимости числа оборотов от нагрузки определяются заранее известными методами, т.е. зависимость n f(PH) характеризует все скоростные режимы п для всех возможных нагрузок, такие, что имеет место минимум расхода топлива. Очевидно, что зависимость, обратная зависимости п i(P), т.е. Рн f(n) характеризует значения оптимальных нагрузок для имеющихся (текущих) скоростных режимов. Эта зависимость может быть как линейная, так и нелинейная (кривая 2, 3). Статическая характеристика датчика деформируется таким образом,чтобы полностью совпадать с оптимальной зависимостью Рн f(n). Таким образом, сигнал U д(фиг.2) на выходе датчика 1 частоты вращения (фиг.1) характеризует величину оптимальной нагрузки Рн для текущего значения частоты вращения приводного двигателя. В случае линейной зависимости в качестве датчика может использоваться тахогенератор, наклон статической характеристики которого выбирается включением соответствующего сопротивления в цепь якоря. В случае нелинейной зависимости в цепьтахогенератора включается любой тип стандартных функциональных преобразователей, реализующих требуемую нелинейность с высокой точностью аппроксимации.
Датчики 3 и 1 активной нагрузки и частоты вращения подстроены таким образом, что сигналы UH и Шмогут быть равны лишь при частоте вращения, оптимальной для данной нагрузки силовой установки. При любых отклонениях частоты вращения от оптимального значения равенство этих сигналов не будет выполняться (при этом статическая ошибка регулирования не учитывается).
На фиг.З представлена статическая характеристика усилителя-ограничителя 6, который может быть выполнен по любой схеме линейных усилителей постоянного тока, в которой путем соответствующего подбора элементов возможно максимальное сужение линейного участка. Диапазон линейного участка выбирается минимальным по условиям сохранения устойчивости силовой установки в переходных процессах.
В качестве порогового коммутатора 11 могут использоваться диоды, образующие связь источника 10 опорного напряжения с выходом датчика 3 активной нагрузки в режиме подпора, т.е. на вход суммирующего усилителя 5 всегда подается большее напряжение ИЗ DHO И DH (фИГ.1).
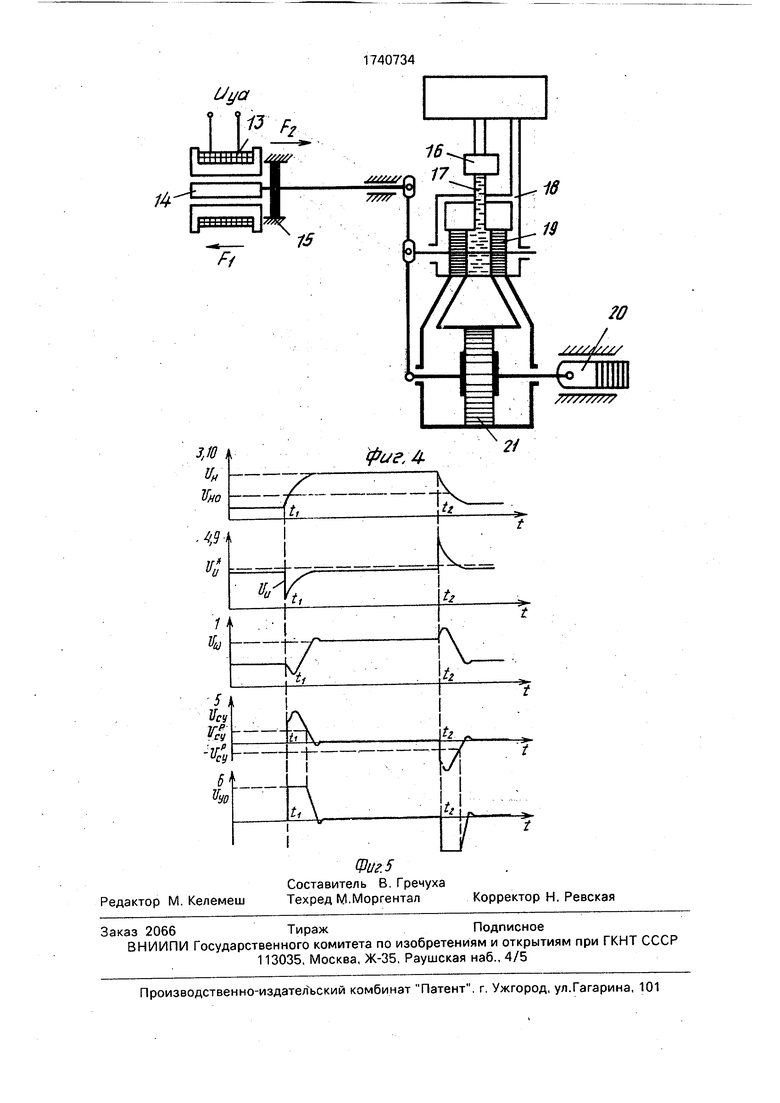
На фиг.4 представлен вариант исполнения исполнительного органа 7. В его состав входит серводвигатель с исполнительным поршнем 21, шток которого соединен с рейкой 20 топливного насоса. Управление положением сервопоршня осуществляется посредством перемещения золотника 19, который при перемещении подключает соответствующие полости серводвигателя к магистралям высокого давления 17 и низкого давления 18. Высокое давление в магистрали 17 создается насосом 16. Перемещения золотника 19 управляются перемещением штока, который связан
с якорем электромагнита 14 и упругой пластины 15. Под воздействием напряжения UCy, подаваемого на обмотку электромагнита 13, якорь электромагнита 14 перемещается, управляя при этом положением
золотника и, следовательно, положением поршня 21 и рейки 20 топливного насоса приводного двигателя.
Регулятор работает следующим образом.
На холостом ходу на 1, 2 и 4 входы
сумматора 5 поступают сигналы 11И , соответственно с выходов элементов 4, 1,9. При этом сигнал с выхода датчика 3 активной нагрузки UH 0, пороговый коммутатор
11 подключает к входу 3 сумматора 5 выход источника 10 опорного напряжения. На выходе сумматора 5 формируется управляющий сигнал
UM - UH + UHO - ,
значение которого таково, что усилитель-ограничитель 6 работает на линейной части своей статической характеристики (фиг.З) и реализуется пропорциональный закон управления.
Под воздействием напряжения Uyo (соответствующего Ucy), подаваемого на обмотку 13 электромагнита (фиг.4), за счет электромагнитной силы FI якорь 14 перемещается до установления баланса силы FI и
силы Fa сопротивления упругой пластины 15. При этом изменяется положение золотника 19, подключающего соответствующие полости серводвигателя к магистралям 17 и 18. В результате перемещения поршня 21
переместится топливная рейка 20 и изменится цикловая подача топлива приводного двигателя.
Управляющее воздействие в виде на- пряжения Ucy будет близко к нулю, если сигналы UH и ии, а также UHO и избудут равны с точностью до статической ошибки регулирования. Таким образом, частота вращения энергетической установки будет от- регулирована относительно уровня
напряжения UHO, т.е. будет работать на минимальной устойчивой частоте.
На малых нагрузках (десятые доли от номинальной) напряжение с датчика 3 активной нагрузки UH по-прежнему меньше напряжения источника 10 опорного напряжения DHO, т.е. UH UHO. Следовательно, пороговый коммутатор 11 по-прежнему подключает к сумматору 5 выход источника 10 опорного напряжения, и процесс регулирования остается неизменным.
В момент ti (фиг.5) происходит наброс нагрузки. Это приводит к мгновенному провалу напряжения на выходе генератора, который фиксируется преобразователем напряжения (сигнал 11И). В момент ti ток нагрузки остается еще неизменным. Поскольку датчик активной нагрузки предполагает перемножение сигналов, характеризующих ток и напряжение, то в момент ti провал напряжения будет повторен на выходе датчика 3 активной нагрузки (сигнал UH). При этом UH станет больше UHO. и пороговый коммутатор 11 подключит 3-й вход сумматора 5 к выходу датчика 3 активной нагрузки. Датчик 1 частоты вращения в момент зафиксирует провал по частоте (сигнал ), установившееся же значение сигнала U будет соответствовать оптимальной нагрузке для установившегося значения частоты (согласно статической характеристике фиг.2). На сумматоре 5 сигналы ии , UH, UH и Uu суммируются, т.е. UCy ии + UH ,так что в момент ti сигнал UCy переводит усилитель-ограничитель 6 в релейный режим, обусловленный его статической характеристикой (фиг.1). Ступенчатое воздействие с выхода усилителя-ограничителя в виде сигнала Uyo переводит исполнительный орган 7 в экстремальное положение. За счет максимальной цикловой подачи достигается фор- сировка приводного двигателя, напряжение и ток на выходе электрического генератора возрастают почти прямо пропорционально частоте вращения. Поэтому в последующие моменты сигнал UCy начинает убывать, а при усилитель-ограничитель переходит от релейного к пропорциональному закону управления. При этом регулирование будет производиться относительно нового уровня ин, т.е. до равенства UH и сигнала Uuic датчика 1 частоты вращения,
что будет соответствовать новым оборотам, оптимальным для данной величины нагрузки.
В случае сбросов нагрузки, при которых
имеют место мгновенные всплески выходного напряжения (момент t2 фиг.5), управление осуществляется аналогичным образом, причем ступенчатое воздействие на исполнительный орган будет иметь обратный
знак.
Таким образом, при набросах (сбросах) нагрузки практически мгновенно (в момент начала изменения напряжения) регулятором формируется ступенчатое (а не монотонно изменяющееся, как в прототипе) управляющее воздействие. Такой тип воздействия на исполнительный орган подачи топлива сокращает время перехода приводного двигателя на новый скоростной режим
ПРИ изменениях нагрузки.
Формула изобретения Регулятор частоты вращения вала энергетической установки, содержащий датчик
частоты вращения, кинематически связанный с валом приводного двигателя, датчик активной нагрузки, задатчик напряжения сумматор, усилитель-ограничитель и исполнительный орган, выход которого соединен
с рейкой топливного насоса приводного двигателя генератора, причем выход сумматора соединен с входом усилителя-ограничителя, выход которого соединен с входом исполнительного органа, выход задатчика
напряжения соединен с первым неинвертирующим выходом сумматора, второй инвер- тирующий вход которого соединен с выходом датчика частоты, отличающийся тем, что, с целью повышения
быстродействия регулирования, в состав регулятора введены преобразователь напряжения генератора, источник опорного напряжения и пороговый коммутатор, причем выход датчика активной нагрузки соединен с первым входом порогового коммутатора, второй вход которого соединен с выходом источника опорного напряжения, выход порогового коммутатора соединен с третьим неинвертирующим вхоДом сумматора, четвертый инвертирующий вход которого соединен с выходом преобразователя напряжения, соединенного с выходом генератора.
PHI
фиг. 2
Рн
Vya
фиг 3
з,ю
Ъ VHO
Щ
V ии
п
Ъ
Si VCy
Г/у
-iffy
20
fae,4
t
| Система фазового регулирования частоты вращения двигатель-генератора | 1985 |
|
SU1254188A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
