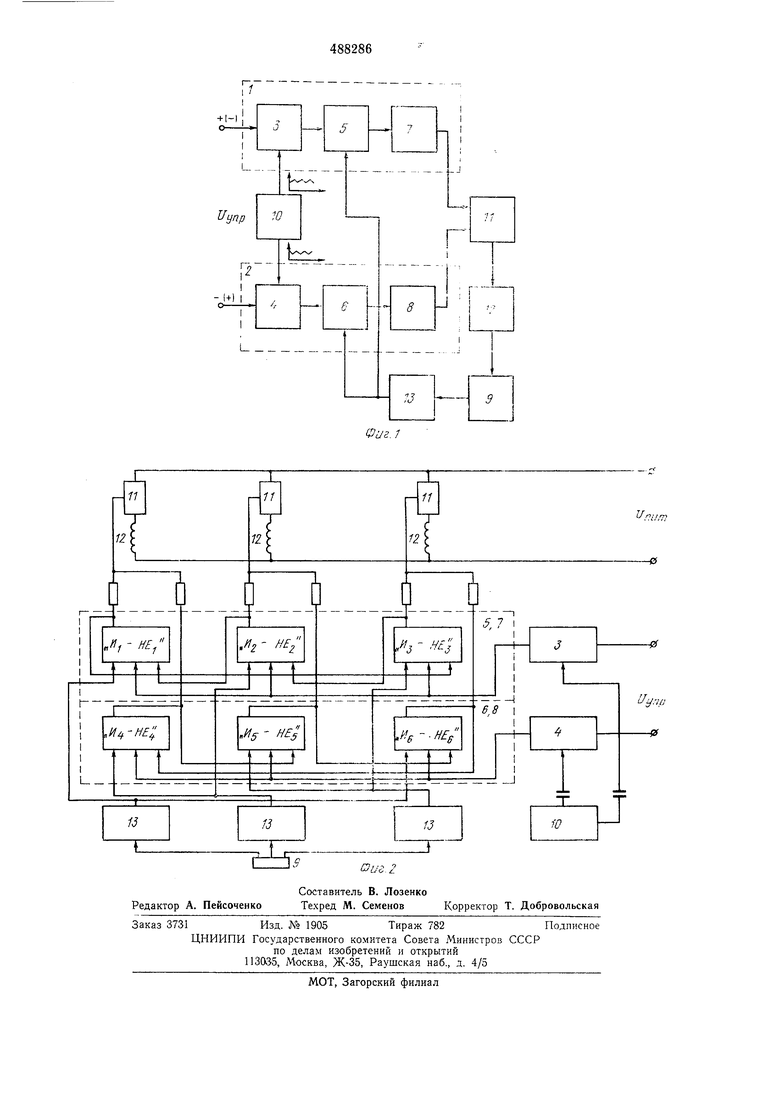
ботающего канала вырабатываются импульсы напряжения, которые подаются на группу логических схем «И и разрешают прохождение сигналов датчика на дешифратор соответствующего канала, при этом сигналы датчика модулируются импульсами широтно-импульсного модулятора. Для двигателя с тремя чувствительными элементами датчика положения ротора с целью обеспечения нормальной коммутации при любом направлении вращения угол сигнального сектора должен быть равен 180 эл. град. Дешифратор выполнен по кольцевой схеме, так что каждый последующий сигнал датчика выключает предыдущий. Наличие двух каналов левого и правого вращений позволяет устранить зону нечувствительности в системе управления следующим образом. На входы щиротно-импульсных модуляторов 3 и 4 подаются сигналы генератора 10 пилообразного напряжения с начальным смещением относительно нулевого уровня, причем эти сигналы вырабатываются со сдвигом по фазе на 180 эл. град, на двух выходах генератора. При этом нулевому сигналу управления т-г соответствует наличие начальных импульсов малой длительности на выходах широтно-импульсных модуляторов обоих каналов, т. е. сигналы с датчика положения ротора, промодулированные сигналами с модулятора, одновременно проходят с дешифраторо.в 7 и 8 на полупроводниковый коммутатор И. Поскольку эти сигналы находятся в противофазе и имеют равную длительность, они комиенсируются и среднее значение электромагнитного момента равно нулю. Сигнал управления уменьшает длительность импульсов на выходе одного из широтно-импульсных модуляторов и увеличивает на выходе другого. До определенного уровня напряжения управления, определяемого величиной начального смещения сигналов генератора пилообразного напряжения, система работает в режиме управления двухполярными импульсами, а по достижении этого уровня - в режиме управления однополярными импульсами. Таким образо.м, зона нечувствительности электропривода определяется только статическим моментом двигателя, ошибка за счет схемы управления сведена к нулю. Системы управления с малой зоной нечувствительности повышают точность систем регулирования и увеличивают сферу применения устройств автоматики. Формула изобретения Реверсивный управляемый бесконтактный двигатель постоянного тока, содержащий коммутатор секций якорной обмотки синхронной машины, управляющие цепи которого через две группы логических схем «И и формирователи сигналов правого и левого направле ..„„и ujjacui ний вращения связаны с чувствительными элементами датчика положения ротора, генератор пилообразного напряжения, первый выход которого через широтно-импульсный модулятор подключен к объединенному входу первой группы логических схем «И, и источник управляющего напряжения, отличающийся тем, что, с целью уменьщения зоны нечувствительности электродвигателя, генератор пилообразного напряжения снабжен вторым противофазным первому выходом, подклю е П П Г т TJ о , ным через дополнительный широтно-импульсный модулятор к объединенному входу второй группы логических схем «И, а источник управляющего напряжения подключен к вхоам широтно-импульсных модуляторов ьТ олненных с начальным смещением.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОПРИВОД | 1990 |
|
RU2012991C1 |
| Вентильный электродвигатель | 1984 |
|
SU1272413A2 |
| Способ управления трехфазным мостовым инвертором,работающим на двигатель переменного тока,и устройство для его осуществления | 1984 |
|
SU1270850A1 |
| Устройство для управления асинхронным короткозамкнутым электродвигателем | 1977 |
|
SU699643A2 |
| Вентильный электродвигатель | 1981 |
|
SU970578A1 |
| Вентильный электродвигатель | 1984 |
|
SU1350773A1 |
| Вентильный электропривод | 1990 |
|
SU1767688A1 |
| Вентильный электродвигатель | 1987 |
|
SU1427508A2 |
| Следящая система | 1982 |
|
SU1081622A1 |
| Синхронизированный бесконтактный электропривод постоянного тока | 1977 |
|
SU731521A1 |