Изобретение относится к система автоматического управления и может быть -Использовано в автоматических измерительных приборах, автоматизи рованном электроприводе при измере нии, контроле и регулировании различных параметров, в станках с про граммным управлением, робототехнических комплексах и т.д. Известна следящая система, содер жащая последовательно соединенные блок сравнения, усилитель/ блок .уп равления и шаговый двигатель, а также блок управления скоростью, вход которого соединен с выходом усилителя. а выход - с входом блок сравнения 1. Недостатками такой следящей системы являются наличие статической ошибки, потому что шаговый двигатель работает в пошаговом режиме,, ограниченное быстродействие и возможность сбоя шагового двигателя при резких изменениях задающего воз действия , Известна также следящая система содержащая измеритель рассогласования , выход которого соединен с входом порогового устройства, триггер первый и второй элементы И,первый элемент ИЛИ, распределитель импульсов, ключ, усилитель мощности, выхо которого соединен с входом шагового двигателя, который через исполнительный механизм соединен с входом измерителя рассогласования и через датчик шагов с первым входом двоичного счетчика, второй вход которого через третий элемент И соединен с выходом генератора импульсов, четвертый элемент И, второй и третий элементы ИЛИ, первый и второй элет менты НЕ и логический &лок входы которого соединены соответственно с выходами распределителя импульсов, второго и третьего элементов ИЛИ и четвертого элемента И, а выход - с входом усилителя, выходы порогового устройства соединены с соответствующими входами первого эл мента ИЛИ и триггера, выходы которого соединены с соответствующими входами распределителя импульсов, первый вход, первого элемента И соединен с первым выходом триггера, а выход - с первым входом элемента ИЛИ, второй вход которого соединен с первым выходом порогового устройства, первый вход второго элемента И соединен с вторым входом триггера, а выход - с первым входом второго элемента ИЛИ, второй вход которого сое динен с вторым выходом порогового устройства, вход первого элемента НЕ соединен с выходом первого элемента ИЛИ, первый выход - с вторыми входами первого и второго элементов И и первым входом четвертого элемента И, второй вход которого соединен с входом второго элемента НЕ и выходом двоичного счетчика, а выход - с управляющим входом ключа, вход которого соединен е выходом дат чика шагов, а выход - с входом распределителя импульсов, выход второго элемента НЕ соединен с третьими входами первого и второго элементов И и входом третьего элемента И С2. Недостатками такой системы являются наличие статической ошибки обусловленной включением порогового устройства с тремя устойчивыми уровнями и с зоной нечувствительности в прямой канал регулирования системы, iнизкая помехоустойчивость вследствие применения импульсного датчика шагов, низкое быстродействие из-за ограничения максимальной скорости системы скоростью холостого хода шагового двигателя при его нейтральной коммутации . Наиболее близкой по технической сущности является следящая си.стема, содержащая блок сравнения, к первому и второму входам которого подключены соответственно задатчик и датчик регулируемой величины, блок уси- лителей, выходы которого соединены соответственно с входами блока определения знака скорости и с обмотками управления шагового двигателя, который механически соединен с датчиком шагов и через объект регулирования с датчиком регулируемой величины, коммутатор, один из входов которого подключен соответственно к выходам датчика шагов и .входам бло ка усилителей, блок задания программы и логический блок, первые входы которых подключены к выходу блока сравнения, первый, второй и третий выходы блока задания программы соединены соответственно с вторым, третьим и четвертым входами логического блока, к пятому и шестому входам которого подключены соответст-венно выходы блока определения знака скорости, первый, второй и третий выходы логического блока соединены соответственно с другими входами коммутатора, четвертый выход логического блока подключен к второму входу блока задания программы, к другим входам которого подключены соответственно выходы датчика шагов, причем логический блок содержит пороговый элемент, вход которого подключен к первому входу логического блока, первый и второй выходы пороге вого элемента соединены соответственно с первым и вторыми входами первого элемента ИЛИ и триггера, первый выход соединен с первыми входами четвертого, пятого и шестого элементов И, второй вход логического блока соединен с вторыми- входами третьего и пятого элементов И, третий вход - с вторыми входами второг и шестого элементов И, четвертый вход - с первым входом седьмого элемента И, пятый вход - с вторым входом четвертого и с третьими входами второго и третьего элементов И, и шестой вход - с вторым входом первого и с третьими входами пятого и шестого элементов И, выход первого элемента ИЛИ соединен с четвертым выходом логического блока и через первый элемент НЕ с вторым входом седьмого элемента И, выход которого подключен к третьему выходу логического блока и через второй элемент .НЕ к третьим входам первого и четвертого и к четвертым входам второго, третьего, пятого и шестого элементов И, выходь первого, второго и пятого элементов И через , второй элемент ИЛИ подключены к первому выходу логического блока, к второму выходу которого через третий элемент ИЛИ подключены выходы третьего, четвертого и шестого элементов И, а блок Зсщания nporpaMNOJ содержит нуль-орган, первый вход которого через, усилитель соединен с первым входом блока задания. программы второй вход которого через дифференцирующую цепь подключен к первому входу первого элемента И, выход которого соединен с первыми входами первого и второго элементов ИЛИ, к второму входу первого из которых через элемент задержки подключен выход третьего элемента ИЛИ, выход первого элемента ИЛИ соединен с первым входом счетчика и через первый генератор развертки с входами первого и второго пороговых элементов, первый и второй выходы первого порогового элемента подключены соответственно к первым входам второго и третьего элементов И, выходы которых соединены соответственно с вторым входом второго элемента ИЛИ и с первым входом триггера, к второму входу которого подключен выход второго элемента ИЛИ, выход нуль-органа соединен с выходом формирователя импульсов, выход которого подключен к второму входу счетчика и через второй генератор развертки к второму входу нуль-органа, выход счетчика через преобразователь код аналог соединен с вторым входом первого порогового элемента, другие вхс ды блока задания программы подключены соответственно к входам третьего элемента ИЛИ, выход которого сое дивен с вторыми и третьими входами Второго и третьего элементов И, а первые и вторые выходы триггера и второго порогового элемента соединены соответственно с первым, вторым, третьим выходами блока задания программы и с вторым входом первого элемента И СЗ.
Недостатками известной системы являются ее низкие точность, помехоустойчивость и быстродействие.
Целью изобретения является повышение точности, помехоустойчивости и быстродействия следящей системы.
Поставленная цель достигается тем, что в следящей системе, содержащей последовательно соединенные блок задания программы и триггер, последовательно соединенные задатчик, блок сравнения, пороговый блок и первый логический блок, последовательно соединенные коммутатор и шаговый двигатель, механически .соединенный выходом с входами датчика шагов и объекта регулирования, выход последнего механически соединен с входом датчика регулируемой координаты, соединенного выходом с вторым входом блока сравнения, первый выход датчика шагов соединен с входом блока задания программы и вторым вхдом триггера, дополнительно установ лены второй и третий логические блоки, широтно-импульсный модулятор и блок выделения модуля, входом соеди ненный с выходом блока сравнения, а выходом через широтно-импульсный модулятор - с первым входом коммутатора, второй вход которого подключен к выходу порогового блока, а третий и четвертый входы - к выходам соответственно второго и -трет его логических блоков, которые первыми входами подключены к выходу триггера, вторыми входами - соответственно к первому и второму выходам первого логического блока, а третьими входами - соответственно 15 третьму и четвертому выходам датчика шагов, первый и второй выходы которо.го соединены срответственно с вторым и третьим входами первого логического блока.
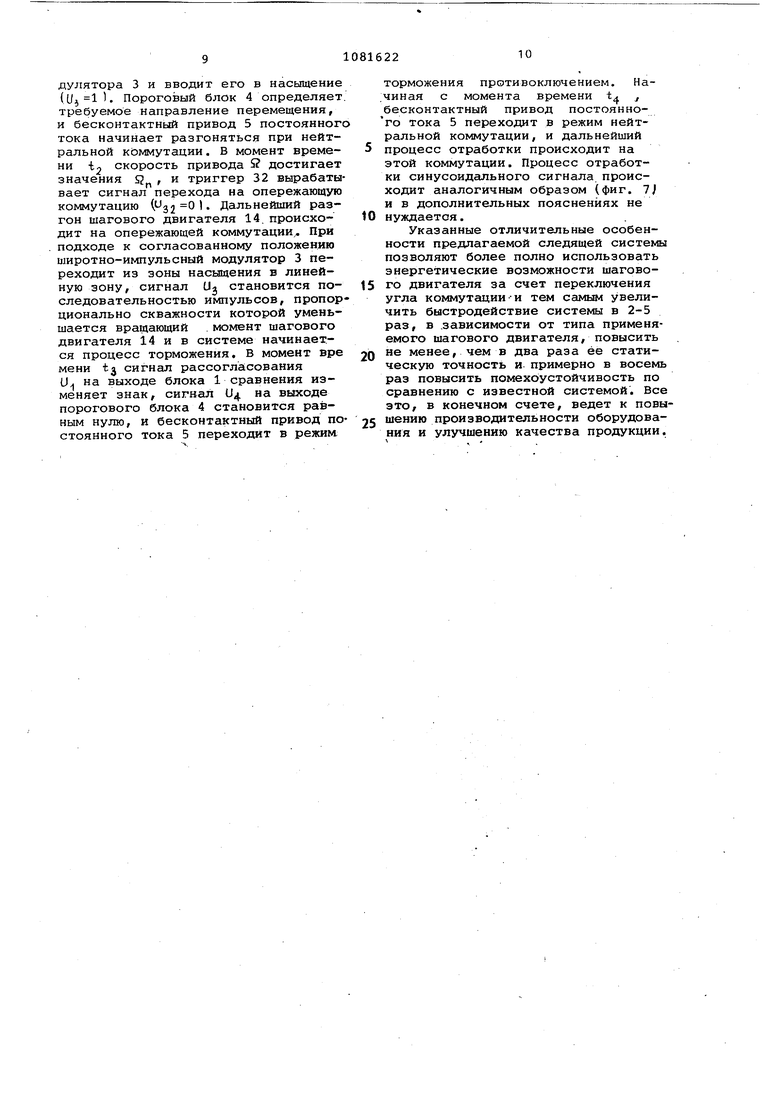
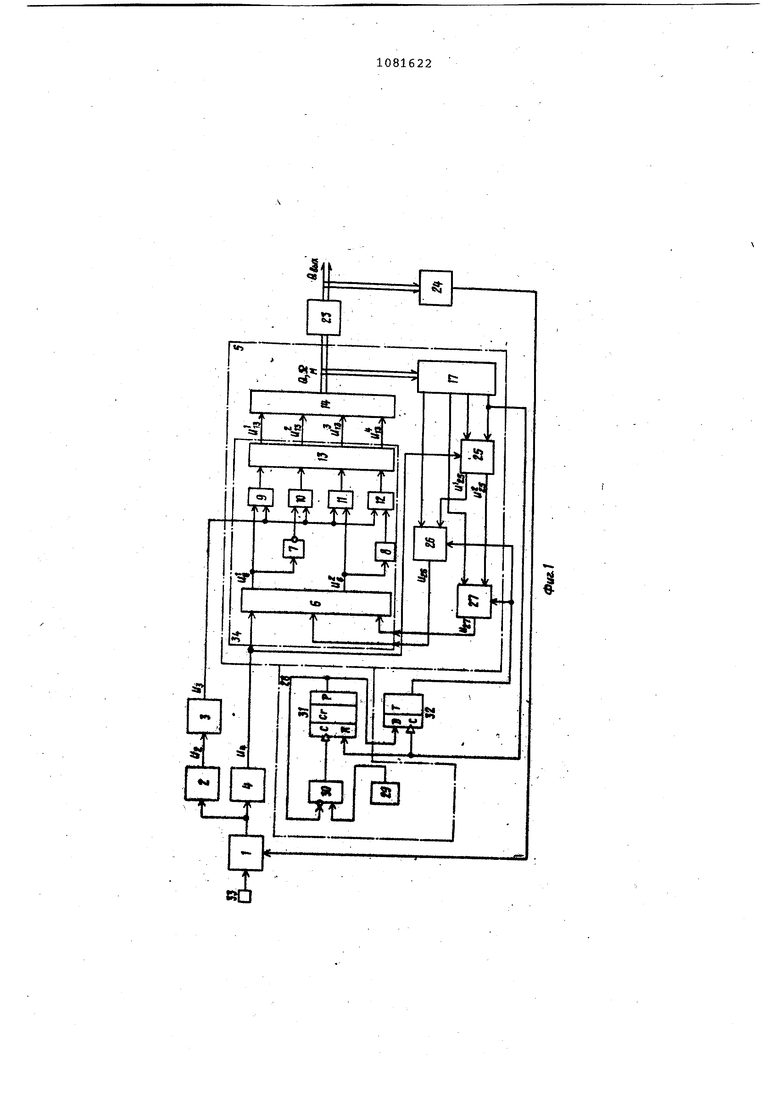
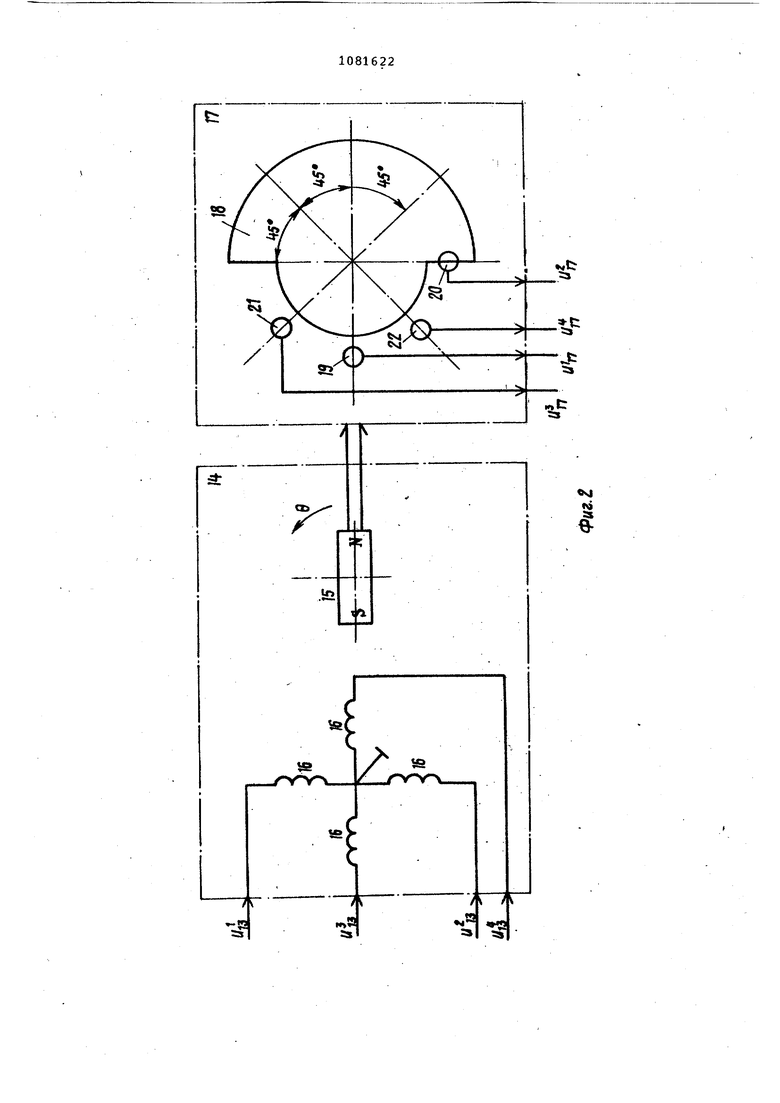
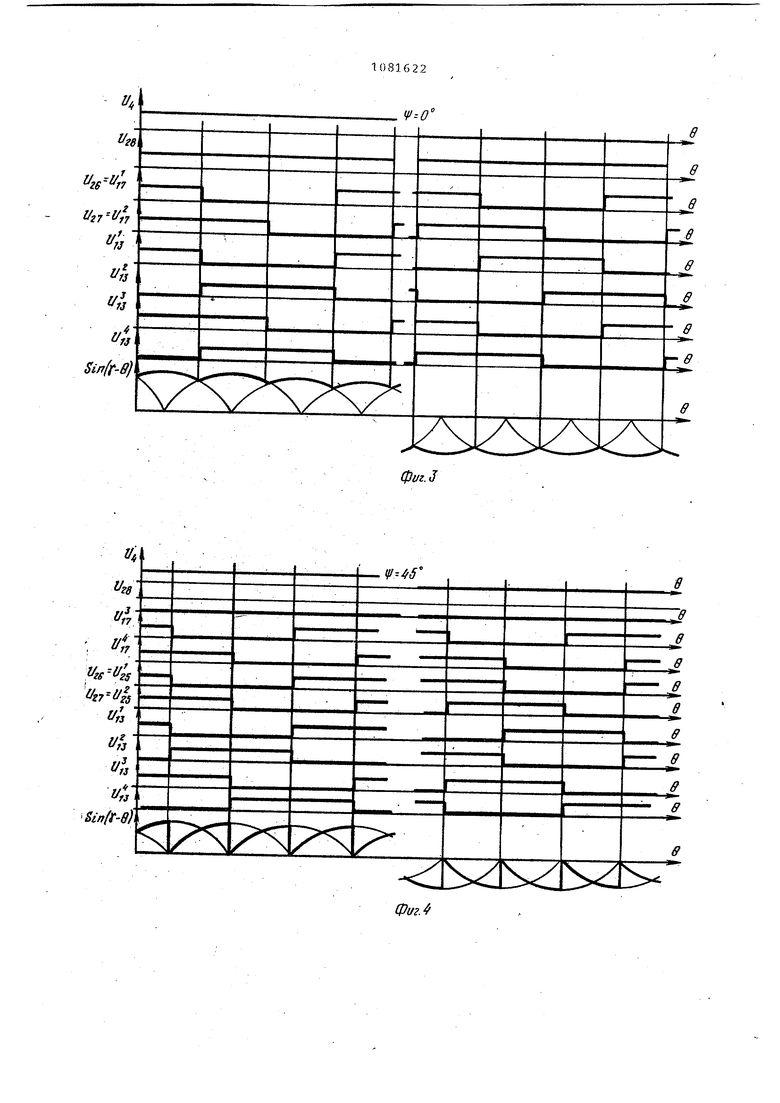
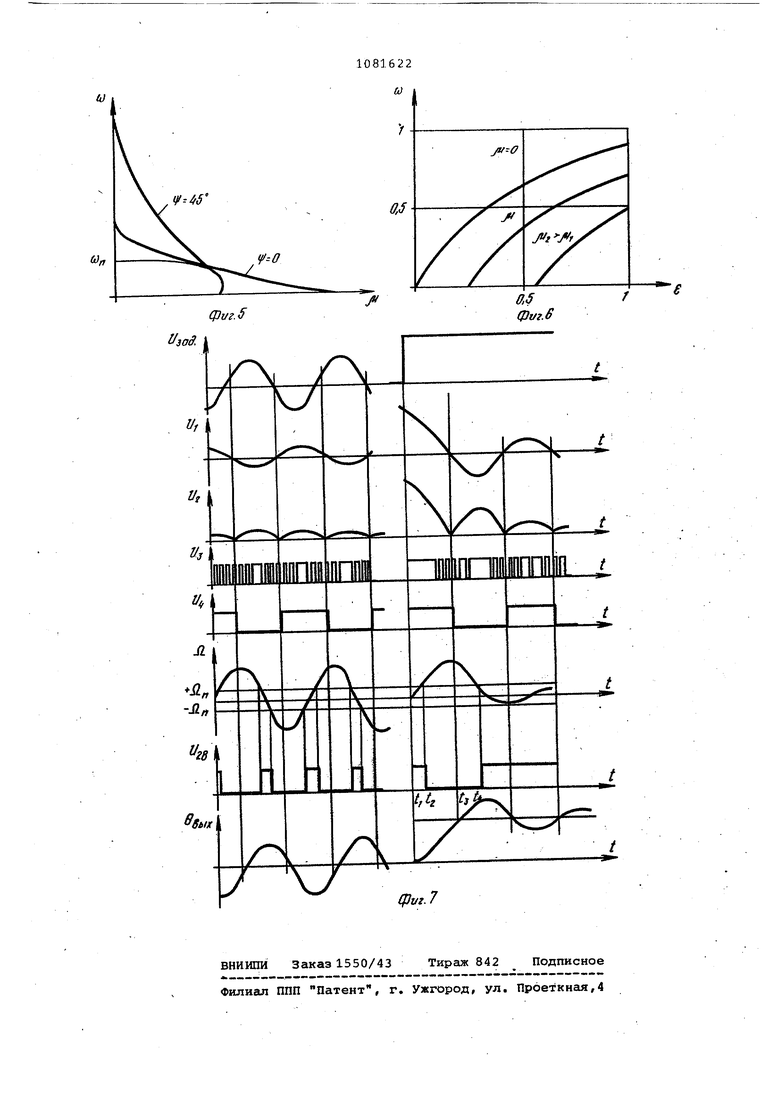
На фиг. 1 представлена функциональная схема системы; на фиг. 2 принципиальная электрическая схема шагового двигателя с датчиком шагов; на фиг, 3 и 4 - временные- диаграммы, поясняющие работу бесконтактного привода постоянного тока; на фиг. 5 и 6 - механические и регулировочные характеристики бесконтактного привода постоянного на фиг. 7 - временная диаграмма, поясняющая работу следяющей системы в целом.
Система включает блок 1 сравнения, блок 2 выделения модуля, широтно-импульсный модулятор 3, пороговый блок 4, бесконтактный привод 5 постоянного тока, логический элеiyieHT 6, первый и второй элементы
ii-; 7 и 8, первый, второй, третий и четвертый элементы И 9-12, усилитель 13 мощности, шаговый двигатель 14 с ротором 15 и обмотками 16 управления, датчик 17 шагов с. кодовым диском 18 и чувствительными элементами 19-22, объект 23 регулировавания, датчик 24 регулируемой координаты, первый, второй и третий логические блоки 25-27, блок 28 задания программы, высокочастотный генератор 29 импульсов, элемент ЗАПРЕТ 30, двоичный счетчик 31, триггер 32 задатчик 33, коммутатор 34.
На фиг. 2-7 обозначено задающее воздействие , угол 6 поворота ротора 15, регулируемая координата 6iii,v на выходе объекта 23 регулироDbf л
В а НИ Я, скорость VJ и вращающий момент лл шагового двигателя 14 в абсолютных единицах,.угол V коммутации скорость (XI и вращающий момент /и. шагового двигателя 14, в относительных единицах, сигнал Ul на i-м выходе j-ro функционального блока, текущее время i, коэффициент заполнения при широтно-импульсной модуляции.
Блок 1 сравнения определяет разность между задающим воздействием
и
зд. и значением регулируемой коордйнаты Q„, , измеряемым датчиком 24
бЫХ
регулируемой координаты, и формирует эту разность в виде напряжения постоянного тока. Блок 2 выделения модуля имеет характеристику
и , при и 7/ О, Uj - -и. , при и О, .. т.е. и .
Широтно-импульсный модулятор 3 преобразует сигнал в последовательность положительных прямоугольных .мпульсов, коэффициент заполнения Е которой прямой пропорционален величине напряжения U . Пороговый блок имеет два устойчивых состояния и формирует логический сигнал в соответствии с выражением:
U.-flf при и 7, О, . о, при U;, 0.
Бесконтактный привод постоянного тока 5 содержит в своем-составе .коммутатор 34, шаговый двигатель 14, датчик 17 шагов, первый, второй, , третий логические блоки 25-27 и триггер 32. В свою очередь коммутатор 34 состоит из логического элеЛ мента 6, элементов НЕ 7 и 8 и элементов И 9-12 и усилителя 13 мощности . Причем логический элемент 6 коммутатора: 34 преобразует выходные сигналы второго и третьего логических блоков 26 и 27 в зависимости от значения выходного сигнала U порогового блока 4 по следующим переклю.чательным функциям
. I- V 21Полученные на выходе логичес-кого элемента 6 сигналы u и uf с помощью элементов НЕ 7 и 8 и элементов И 9-12 прербразуются в широтно-импульсно-модулированные сигналы 5 управления, -J oтopый после усиления их усилителем мощности 13 переключают обмотки 16 управления шагового двигателя 14. Для простоты изложения в качестве примера рассматрива0 етоя шаговый двигатель 14, имеющий на роторе 15 оДну пару полюсов и на статоре четыре обмотки 16 управления. Если шаговый двигатель 14 имеет ротор 15 с несколькими парами
5 полюсов, то изменяется срот ветствующим образом конфигурация кодового диска 18, причем количество выступов на нем делается равным числу пар полюсов ротора 15. Датчик 17 шагов
Q СОСТРИТ из подвижного кодового диска 18, жестко связанного с ротором 15, и неподвижных чувствительных эле ментов 19-22, например, фотоэлектрического типа.
с Если,кодовый диск 18 перекрывает световой поток данного чувствительнрго элемента 19 (или 20, или 21, , или 22 ), то его выходной сигнал U равен нулю, в противном случае единице.
Расположение чувствительных элементов 19-22 относительно обмоток 16 управления и кодового диска 18 относительно ротора 15 должно быть та-л КИМ, как показано на фиг. 3. При та5 ком расположении сигналы ,, uj
чувствительных элементов 19 и 20 мож но непосредственно использовать для управления шаговым двигателем. 14 в режиме нейтральной коммутации. Для
0 создания сигналов управления в режиме опережающей коммутации сигналы , и| чувствительных элементов 21 и 22 нуждаются в предварительном преобразовании . При этом в первом л.оги5 Ческом блоке 25 они преобразуются в соответствии с переключательными функциями
,
|3 -17
В зависимости от выходного сигнала LJj триггера 32 второй и третий логические элементы 26 и 27 подключают к входам логического элемента 6 коммутатора 34 либо выходные сигналы чувствительных элементов 19 и 20, либо выходные сигналы первого логического элемента 25 в соответствии с переключающими функциями
32 i 2Т
Блок 28 задания программы имеет-релейную характеристику Г1, при , при |П| ег„ где й - некоторое дороговое значение скорости шагового двигателя 14, построен на основе принципа заполнения временного интервала импульсами высокой частоты и по своему . конструктивному составу он аналогичен блоку измерения скорости извест ной следящей системы. Триггер 32 преобразует импульсный выходной сигнал блока 28 зада.ния программы в потенциальный. Следящая система работает следующим образом. . Вначале рассмотрим работу бёс«он тактного привода постоянного тока 5 при отсутствии широтно-импульсной модуляции, т.е. при (Uj 1/. Работа бесконтактного привода 5 постоянного тока в режиме нейтральной коммутации (т.е. при V.0) ив режиме опережающей коммутации (т.е. при-. V 45°) поясняется временными диаграммами, приведенными на фиг.З и 4 соответственно. Угол коммутации QCP 90° где j- - угол поворота вектора поля статора в рсреднее за период коммутации значение угла поворота ротора 15. Пусковой момент шагового двигателя 14 пр порционален 5in(x-0)Как видно из диаграмм (фиг. 3 и 4) среднее значение пускового момента при больше, чем при , но по мере увеличения скорое ти шагового двигателя 14 это соотношение изменяется на противоположное за счет постоянной времени обмоток 16 управления шагового двигателя 14. Это подтверждается уравнением механической характеристики шагового двигателя 14 в режиме бесконтактного двигателя постоянного .тока, которое в относительных едини цах может быть записа.но в виде co3V+uj(ae/ii 15 пЧ-ш где ч - внутреннее демпфирование ша гового двигателя 14; - безразмерная постоянная вре мени обмоток 16 управления; (М. - безразмерный коэффициент; V - угол коммутации; ш - скорость шагового двигателя 14 в относительных единицах. Пользуясь этим уравнением, можно построить механические характеристи ки бесконтактного привода постоянно го тока 5 при угле коммутации и (фиг.5). Таким образом, если в указанном приводе осуществля переключение угла коммутации п{эи достижении относительной скорости ы, то результирующая механическа характеристика будет иметь значение пускового момента, соответствующее нейтральной-коммутации, а значение скорости холостого хода |опережающей. Величина u)p легко наводится из приведенного выше уравнения и составляет -п(-) Если же Uj представляет собой лоследовательность прямоугольных импульсов с коэффициентом эаполнения , то механическая характеристика шагового двигателя 14 имеет вид (uj,g) . Регулировочные характеристики системы в этом случае имеют вид, указанный на фиг.6. Поскольку в данной системе подключение выходных сигналов логических элементов 25-27 к входам коммутатора 34 определяется программой, заданной в блоке 28 задания программы, то рассмотрим более подробно работу этого блока. На вход блока 28 задания программы поступает сигнал с выхода чувствительного элемента 2S датчика 17 шагов в виде последовательности прямоугольных импульсов. При поступлении очередного импульса двоичный счетчик 31 устанавливается в нулевое положение. В паузе между импульсами сигнал установки двоичного счетчика 31 снят и производится счет импульсов генератора 29, поступающий на счетный вход двоичного счетчика 31 через элемент ЗАПРЕТ 30. Счет импульсов происходит до тех пор, пока на выходе двоичного счетчика 31 не возникнет, .сигнал переноса и не запретит дгшьнейшее прохождение иквпульсов через элемент ЗАПРЕТ 30,либо до прихода следующего импульса на вход блока 28 задания программы. В первом случае перед ним фронтом этого импульса в триггер 32 запишется потенциал логической единицы, свидетельствующий о том, что пауза между импульсами велика, т.е. (Я| 4 QP , во втором случае запишется потенциал логического нуля. Работа следящей системы при синусоидальном и скачкообразном задающих воздействиях поясняется временной диаграммой, приведенной на фиг.7. Система при скачкообразном задающем воздействии работает еледующим образом. В первом временном интервале t блок 1 сравнения вырабатывает большой положительный сигнал рассогласования U , который через блок 2 выделения модуля поступает на вход широуно-импульсного модулятора 3 и вводит его в насыщение ( . Пороговый блок 4 определяет требуемое направление перемещения, и бесконтактный привод 5 постоянног тока начинает разгоняться при нейтральной коммутации. В момент времени i скорость привода S достигает значения SJ , и триггер 32 вырабатывает сигнал перехода на опережающую коммутацию (). Дальнейший разгон шагового двигателя 14. происходит на опережающей коммутации При подходе к согласованному положению широтно-импульсный модулятор 3 переходит из зоны насыщения в линейную зону, сигнал Uj становится последовательностью импульсов, пропорционально скважности которой уменьшается вращающий . момент шагового двигателя 14 и в системе начинается процесс торможения. В момент вре мени t сигнал рассогласования и на выходе блока 1 сравнения изменяет знак, сигнал U, на выходе порогового блока 4 становится равным нулю, и бесконтактный привод постоянного тока 5 переходит в режим
торможения противоключением. Начиная с момента времени t j бесконтактный привод постоянного тока 5 переходит в режим нейтральной коммутации, и дальнейший процесс отработки происходит на этой коммутации. Процесс отработки синусоидального сигнала происходит аналогичным образом (фиг. 1} и в дополнительных пояснениях не
нуждается.
Указанные отличительные особенности предлагаемой следящей системы позволяют более полно использовать энергетические возможности шагового двигателя за счет переключения угла коммутации и тем самым увеличить быстродействие системы в 2-5 раз, в .зависимости от типа применяемого шагового двигателя, повысить
не менее, чем в два раза ее статическую точность и примерно в восемь раз повысить помехоустойчивость по сравнению с известной системой. Все это/ в конечном счете, ведет к повышению производительности оборудования и улучшению качества продукции.
ад
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1975 |
|
SU585474A1 |
| Цифровая следящая система | 1989 |
|
SU1797094A1 |
| Цифровая следящая система | 1987 |
|
SU1797093A1 |
| Цифровая следящая система | 1987 |
|
SU1730610A1 |
| Серводин | 1986 |
|
SU1667000A1 |
| Устройство для программного управления шаговым двигателем | 1981 |
|
SU1012207A1 |
| Устройство для программного управления шаговым двигателем | 1981 |
|
SU1015339A1 |
| Устройство для программного управления шаговым двигателем | 1989 |
|
SU1675850A1 |
| Устройство для управления шаговым режимом работы конвейера | 1988 |
|
SU1747359A1 |
| СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ СБОРОЧНЫМ УСТРОЙСТВОМ | 1991 |
|
RU2029335C1 |
СЛЕДЯЩАЯ СИСТЕМА, содержа- щая последовательно соединенные блок задания программа я триггер, последовательно соединенные задатчик, блок сравнения, пороговый блок и i первый логический блок, последовательно соединенные коммутатор и шаговый двигатель, механически соединенный выходом с входами датчика шагов и объекта регулирования, выход последнего механически соединен с ;входом датчика регулируемой координаты, соединенного выходом с вторым входом блока сравнения, первый выход датчика шагов соединен с входом блока задания программы и вторым входом триггера, отличающаяс я тем, что, с целью повышения точности, быстродействия и помехоустойчивости систекы, в ней дополнительно установленй второй и третий логические блоки,, широтно-импульсный модулятор и блок выделения модуля, входом соединенный с выходом блока . сравнения, а выходом через широтнримпульсный модулятор - с первым входом коммутатора, второй вход которого подключен к выходу порогового блока, а третий и четвертый входы к выходам соответственно второго и третьего логических блоков, котоЕие § первыми входами подключены к выходу (Л триггера, вторыми входами - соответственно к первому и второму выхрдеш первого логического блока, а третьими входами - соответственно к треть ему и четвертому выходам датчика ша- S гов, первый и второй выходы которого соединены соответственно 1с вторым и третьим входами первого логического блока. 00 05 S
GO
tr
iS
-.«
sl
vs
.Я
V
vie
и,и„
4
4 /J
.5
J в
9Мн.
в
Э|мн.
В
в
Sifrir-ff
в
V,
V,
гв
V.
17
47 4
г
/
/J
,,3 «
4i
7
Stuff-в}
ff
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Следящая система | 1975 |
|
SU547726A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
