сл
с
| название | год | авторы | номер документа |
|---|---|---|---|
| Вентильный электропривод | 1983 |
|
SU1270858A1 |
| Регулируемый ветнильный электродвигатель | 1977 |
|
SU684684A1 |
| Реверсивный вентильный электропривод | 1988 |
|
SU1598097A1 |
| Вентильный электродвигатель | 1976 |
|
SU647806A1 |
| Реверсивный вентильный электродвигатель | 1982 |
|
SU1030929A1 |
| Вентильный двигатель | 1975 |
|
SU692013A1 |
| Устройство для установки и стабилизации фазового положения блока вращающихся головок | 1986 |
|
SU1515195A1 |
| Вентильный электродвигатель | 1983 |
|
SU1108576A1 |
| Вентильный электродвигатель | 1981 |
|
SU1001344A1 |
| Вентильный электропривод | 1991 |
|
SU1829101A1 |
Использование в электротехнике Сущность: использование дополнительного формирователя 13 узких импульсов, порогового элемента 11, двоичного реверсивного счетчика 15, логического элемента И, дополнительного канала управления таймером 7 совместно с широтно-импульсным регулятором 16 и включенным логическим переключателем 14 между датчиком 5 положения ротора и регистром 4 памяти позволит автоматически изменять структуру системы и алгоритм управления, обеспечивая регулирование скорости вверх от основной в синхронном режиме и надежную работу в динамических режимах 4 ил , 1 табл
ll
XJ
о VJ о
00
со
Изобретение относится к электротехнике. Известен вентильный электропривод, содержащий синхронный двигатель,на ва лу которого размещены датчик обложения ротора и датчик частоты вращения, а выводы обмоток статора подключены к выходу вентильного коммутатора. Вход коммутато ра соединен с выходом преобразователя координат, входы которбгб соединены с выходами первого и второго блоков умножения, входами подключенных к Синусному и косинусному выходам датчика положения ротора. Кроме того, в вентильный Электропривод входят задатчик скорости, регулятор скорости, блок деления, два источника эта- лонного сигнала, усилитель с ограничением, нуль-орган, переключатель и задатмик продольной составляющей тока статора. I
Известное устройство обеспечивает двухзонное регулирование в режиме вен- тильного двигателя, Причем переход1 в верхнюю зону осуществляется за счет регулирования продольной размагничив ю- щей составляющей тока стаТбра, 4то эквивалентно изменению режима коммута-
ЦИИ. J „ , „ j
Известный вентильный электропривод в обеих зонах работает в режиме вентильного Двигателя без максимального использования естественных свойств синхронной машины. 8 результате обеспечение высокой точности регулирования скорости в нижней зоне приводит к схемной избыточности, а е верхней зоне, при нали4ии усилителя с ограничением в канале регул и- рования скорости, обеспечение точности регулирования становится невозможным.
Таким образом, недостатками известного технического решения яё/гяТотСя невысокая точность регулирования и сложность схемы.
Известен вентильный электропривод, содержащий синхронную машину с датчиком положения ротора на валу, зажимы обмоток статора которой подключены к вУходам вентильного коммутатора, входы которого подключены к выходу первого узла сравнения и к выходам кольцевого коммутатора. Задатчик частоты выходом соединен с первым входом элемента памяти, выход ко- торого подключен к первому входу частотно-фазового дискриминатора, второй вход которого соединен с выходом элемента И, а выход - со вторым входом элемента памяти и входом кольцевого коммутатора, причем входы элемента И соединены с выходами первого и второго узлов сравнения. Входы узлов сравнения соединены с выходами датчика положения ротора и с входами кольцевого коммутатора.
В известном вентильном приводе машина всегда работает в режиме синхронного двигатели, а сигналы датчика положения ротора используются для предотвращения выпадания двигателя из синхронизма. В результате обеспечивается высокая точность поддержания средней скорости в статических режимах. В то же время, здесь сохраняются недостатки синхронного привода в переходных режимах. Пуск привода всегда происходит при опережающей коммутации, что снижает пусковой момент и увеличивает потери, а начальный разворот роторз может происходить и в обратном направлении, что затягивает еще больше начальную стадию разгона. Отсутствие регулирования амплитуды напряжения в зависимости от задаваемой частоты приводит либо к существенному уменьшению перегрузочной способности привода в зоне больших скоростей, либо к увеличению потерь на малых скоростях. Кроме того, корректировка амплитуды напряжения на каждом уровне скорости осуществляется импульсным методом с произвольными (случайными) нулевыми паузами, не определяемыми однозначно сигналом управления, что приводит к самораскачиванию ротора вокруг средней скорости и снижению точности регулирования.
Таким образом, основными недостатками известного вентильного электропривода являются невысокие динамические показатели и точность регулирования, а также ограниченный диапазон регулирования, т.е. независимое регулирование осуществляют только по частоте.
Наиболее близким к изобретению является вентильный электропривод, содержащий m-фазный синхронный двигатель с постоянными магнитами на роторе;, соединенный фазными обмотками с вентильным коммутатором, генератор тактовых импульсов, датчик положения ротора, выполненный с m чувствительными элементами, выходы которого через m импульсных усилителей связаны с информационными входами регистра кода положения ротора, выходы которого через логический формирователь соединены с управляющими входами вентильного коммутатора, логический элемент И, формирователь узких импульсов, преобразователь m-фазного выходного импульсного сигнала регистра в последовательность узких импульсов, таймер и источник задающего сигнала таймера, выход логического элемента И соединен с управляющим входом регистра, а его входы связаны с выходами таймера и формирователя узких импульсов, входы преобразователя тфазного выходного сигнала регистра соединены с выходами регистра, а выход подключен к запускающему входу таймера, управляющий вход которого связан с выходом источника задающего сигнала таймера.
Положительными свойствами известного вентильного электропривода является обеспечение пуска всегда в режиме вентильного двигателя при нейтральной коммутации и при максимальном пусковом моменте, а в режиме поддержания скорости - в режиме синхронной машины. А также плавный переход из режима вентильного двигателя в синхронный режим при достижении заданной скорости и обратный переход при перегрузке машины. К недостаткам вентильного привода можно отнести следующие. При снижении задания на скорость возможно выпадение двигателя из синхронизма из-за отсутствия ограничения угла отставания коммутации в синхронном режиме. При этом возможно торможение ротора машины до нуля и даже его реверсирование. Бросок тока, возникающий при этом режиме, может привести к аварии коммутатора При снижении задаваемой частоты вращения без снижения амплитуды напряжения растут потери в обмотках, а работа на скоростях выше основной скорости при нейтральной коммутации вообще невозможна.
Таким образом, основными недостатками известного вентильного электропривода являются ограниченный диапазон регулирования и возможность перехода в неустойчивые режимы.
Цель изобретения - расширение диапазона регулирования скорости и повышение точности регулирования в переходных режимах,
Сущность изобретения заключается в том, что в вентильный электропривод, содержащий синхронный m-фазный двигатель с постоянными магнитами на роторе, фазные обмотки которого соединены с выходами вентильного коммутатора, связанного управляющими входами через дешифратор с выходами m-разрядного регистра памяти, датчик положение ротора с m чувствительными элементами, генератор тактовых импульсов, таймер, соединенный управляющим входом с источником задающего сигнала, а его выход соединен с первым входом первого логического элемента И, выход которого связан с управляющим входом регистра памяти, первый формирователь узких импульсов, входы которого соединены с выходами т-разрядного регистра памяти, а его выход связан с входом запуска таймера, введены второй формирователь узких импульсов, пороговый элемент, логический переключатель, двоичный реверсивный двухразрядный счетчик, второй логический элемент И, широтно импульсный регулятор, выход первого формирователя узких импульсов соединен с суммирующим входом реверсивного счетчика, выходы первого и второго разрядов которого связаны соответственно с первым и
вторым управляющими входами логического элемента И, выход которого соединен с входом сброса таймера, входы второго формирователя узких импульсов соединены с выходами датчика положения ротора, а выход второго формирователя связан с входом порогового элемента и вычитающем входом реверсивного счетчика, выход портового элемента подключен к третьему управляющему входу логического переключателя,
выходы которого соединены с информационными входами регистра памяти, первая группа m входов логического переключателя связана с выходами регистра памяти, а вторая группа m входов логического переключателя соединена с выходами датчика положения ротора, широтно-импульсный регулятор связан входом с источником задающего сигнала, а его выход соединен с блокирующим входом дешифратора, выход
генератора тактовых импульсов соединен со вторым входом первого логического элемента И
Таким образом, введение в устройство широтно-импульсного регулятора, связанного входом с задатчиком частоты а выходом - с дешифратором, позволяет снизить потери при работе на скоростях ниже основной скорости. Использование дополнительно второго формирователя узких импульсов,
порогового элемента, двоичного реверсивного двухразрядного счетчика, второго логического элемента И, дополнительного канала управления таймером на основе этих элементов, ах также Укл ючёнйе логического
переключателя между датчиком положения ротора и регистром с соответствующими дополнительными связями позволяют в сочетании с широтно-импульсным регулятором автоматически менять структуру системы и
алгоритм управления, обеспечивая регулирование скорости вверх от основной в синхронном режиме и надежную работу в динамических режимах В результате совокупность перечисленных признаков обеспечивает достижение поставленной цели
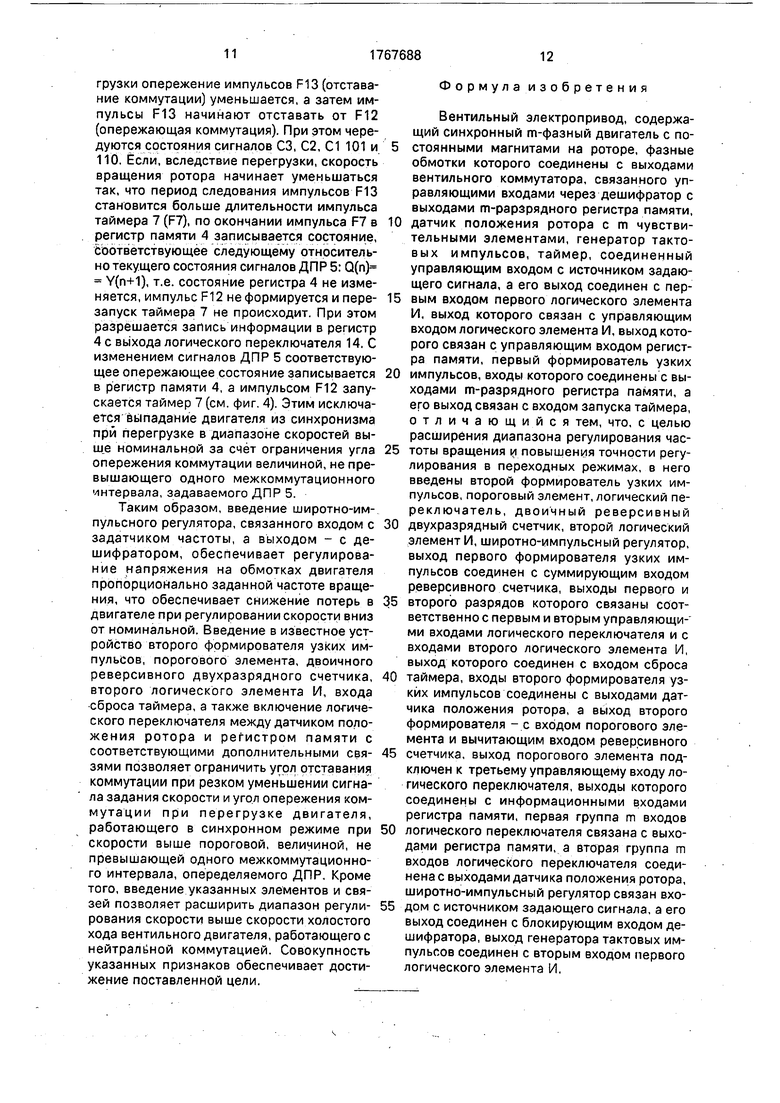
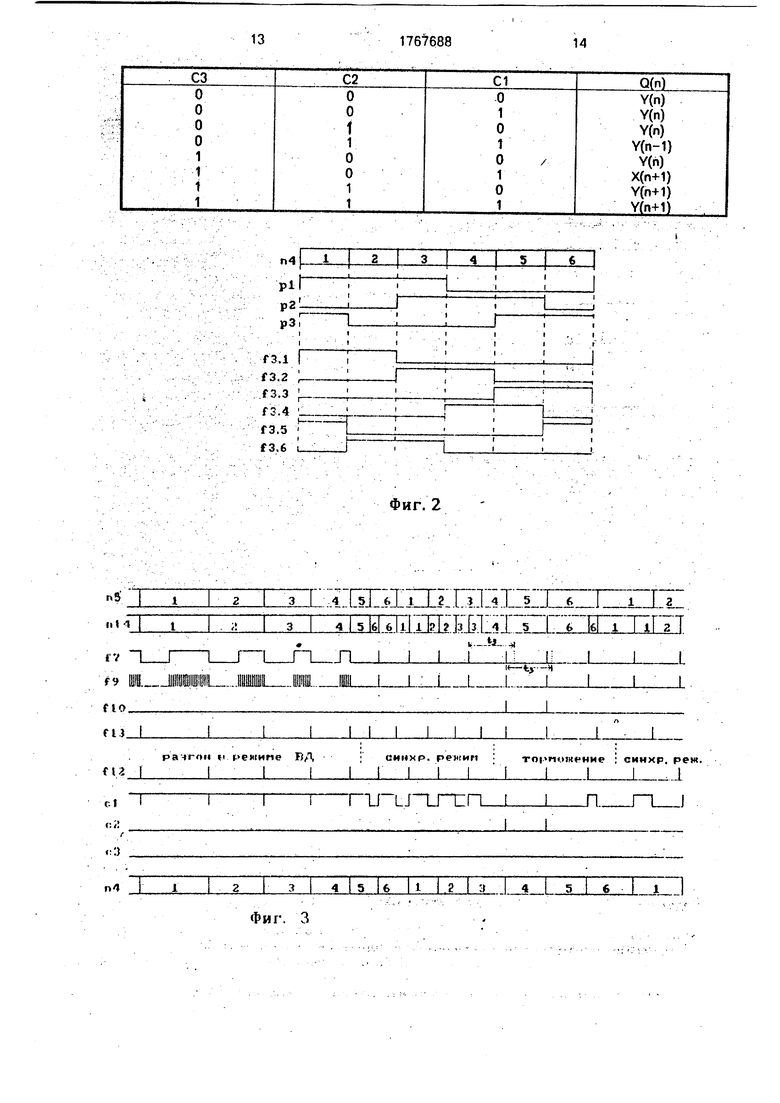
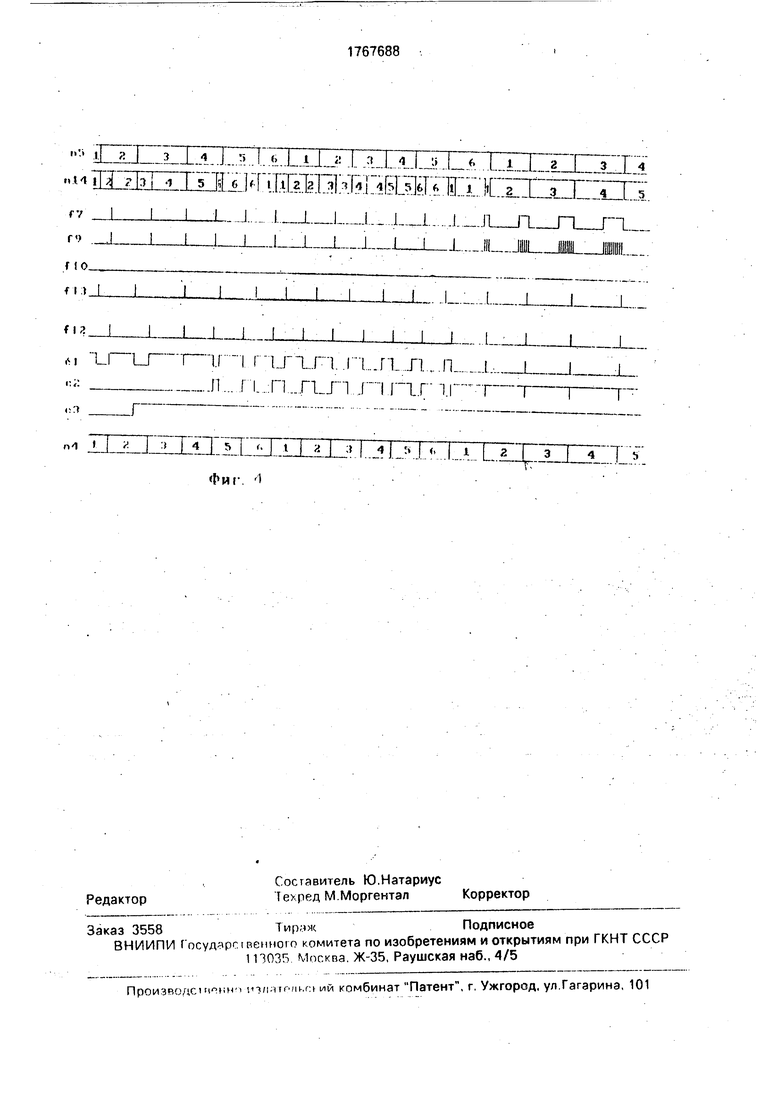
На фиг 1 изображена структурная схема устройства; на фиг 2 - диаграмма выход- ных сигналов регистра памяти и дешифратора, нумерация состояний выходных сигналов регистра, а также логика работы логического переключателя; на фиг. 3, 4 - диаграммы работы устройства.
Устройство на фиг. 1 содержит синхронный m-фазный двигатель 1 с постоянными магнитами на роторе, транзисторный коммутатор 2, дешифратор сигналов управления 3, m-фазный регистр памяти состояний коммутатора 4, датчик положения ротора ДПР 5cm чувствительными элементами, генератор тактовых импульсов ГТИ 6, таймер 7, источник задающего сигнала 8, первый и второй логические элемента И 9 и 10, пороговый элемент 11, первый и второй формирователи узких импульсов 12 и 13, логический переключатель 14, двоичный реверсивный двухразрядный счетчик 15, и ши- ротно-импульсный регулятор 16. Фазные обмотки двигателя 1 соединены с выходами транзисторного коммутатора 2, связанного управляющими входами через дешифратор 3 с выходами регистра памяти 4, связанного управляющими входами с выходом первого логического элемента И 9, первый вход которого соединен с выходом таймера 7, под- ключенного управляющим входом к источнику сигнала задания 8, а второй вход первого логического элемента И 9 соединен с выходом генератора тактовых импульсов 6. Выходы регистра памяти 4 связаны с первой группой m входов логического переключателя 14 и с входами первого формирователя узких импульсов 12, выход которого соединен с входом запуска таймера 7 и с суммирующим входом реверсивного счетчика 15, первый и второй входы которого связаны соответственно с первым и вторым управляющими входами логического переключателя 14 и с входами второго логического элемента И 10, выход которого соединен с входом сброса таймера 7. Второй формирователь узких импульсов 13 связан входами с выходом датчика положения 5, а выходом - с входом порогового элемента 11 и с вычитающим входом реверсивного счетчика 15. Выход порогового элемента 11 соединен с третьим управляющим входом логического переключателя 14, вторая группа m входов которого подключена к выходам датчика положения ротора 5. Широтно-импульсный регулятор 16 связан входом с источником сигнала задания 8, а выходом - с блокирующим входом дешифратора 3.
Устройство работает следующим образом, Транзисторный коммутатор 2 подключает фазные обмотки двигателя 1 к источнику питания в соответствии с управляющими сигналами 120-градусной коммутации, формируемыми дешифратором 3 из выходных сигналов регистра памяти 4. Формирователи 12 и 13 формируют узкие импульсы при каждом изменении выходных сигналов соответственно регистра памяти 4 и датчика положения ротора 5.
Сигналы Q(n) на информационных входах регистра памяти 4, определяющие его следующее состояние, зависят от сигналов на управляющих входах С1-СЗ логического переключателя 14, а также от текущего состояния сигналов Х(п) регистра памяти 4 и сигналов Y(n) датчика положения ротора, где п- номер состояния сигналов логического переключателя (п 14), регистра памяти (п4) или датчика положения ротора (п5). Последовательносгь состояний сигналов на выходе регистра памяти 4 п4 (сигналы Р1-РЗ) приведена на фиг. 2. Последовательности п5 (сигналы Y1-Y3) И п14 (сигналы Q1-Q3) аналогичны. В зависимости от сигналов С1СЗ состояние выходов логического переключателя 14 соответствует текущему, предыдущему или следующему состоянию сигналов датчика положения ротора 5, или следующему состоянию регистра памяти 4
(см. таблицу).
Таймер 7 формирует импульсы с низким активным уровнем (фиг.1) длительностью, обратно пропорциональной величине сигнала задатчика частоты 8 и равной длительности межкоммутационного интервала при заданной частоте вращения, который блокирует прохождение импульсов генератора 6 через логический элемент И 9 на вход записи регистра памяти 4. Таким образом, на время действия выходного импульса тайме- ра 7 фиксируется состояние регистра памяти 4, а значит, и транзисторов коммутатора 2. По окончании импульса таймера 7
разрешается смена состояния выходных сигналов Р1-РЗ регистра памяти 4 и транзисторов коммутатора 2 путем пропускания импульсов генератора 6 через логический элемент И 9 на вход записи регистра памяти
И 9 оно фиксируется в регистре памяти 4, изменение сигналов на его выходе Р1-РЗ вызывает формирование короткого импульса на выходе формирователя 12, запуск таймера 7 и прекращение прохождения импульсов ГТИ 6 через логический элемент И 9. При этом по окончании импульса таймера 7 на выход элемента И 9 проходит только один импульс ГТИ 6, а вентильный электропривод работает в синхронном ре- жиме, когда моменты переключения гранзисторов коммутатора 2 отстают по фазе от соответствующих моментов изменения сигналов на выходе ДПР 5 (п4 отстает от п5).
При скорости вращения ротора двигателя 1, не превышающей некоторого порогового значения, при котором длительность межкоммутационного интервала равна to, период следования импульсов на выходе формирователя 13 меньше to, и на выходе порогового элемента 11 присутствует сигнал с уровнем лог, О (СЗ 0 фиг. 3). При перегрузке двигателя, а также при пуске, когда частота вращения ротора меньше заданной, период изменения сигналов на выходе ДПР 5 (период следования коротких импульсов на выходе формирователя 13 F13) больше длительности импульсов на выходе таймера 7. Поэтому по окончании импульса таймера 7 на выходе логического элемента И 9 формируется пачка импульсов ГТИ 6 до момента изменения сигналов Q1-Q3 (на фиг. 3 - п14), после чего новое состояние этих сигналов фиксируется в регистре 4 (п4 п14), а изменение выходных сигналов Р1-РЗ последнего приводит к новому запуску таймера 7 через формирователь 12 и прекращению пачки импульсов на выходе элемента И 9. В этом режиме, в момент записи нового состояния регистра памяти 4, сигналы СЗ, С2, С1 на управляющих входах логического переключателя 14 равны, соответственно 001, а выходные сигналы логического переключателя 14 соответствуют выходным сигналам датчика положения ротора 5: Q(n) (Yn). Широтно- импульсный регулятор 16 обеспечивает линейную зависимость коэффициента заполнения выходных импульсов от сигнала задания скорости. При этом двигатель работает с самокоммутацией по сигналам ДПР 5 на искусственной характеристике, положение которой определяется напряжением питания, пропорциональным сигналу задания скорости
По окончании разгона (или уменьшении момента нагрузки) период следования импульсов F13 становится равным длительности импульсов таймера 7, а затем изменение сигналов датчика положения ротора 5 начинает опережать окончание блокирующего импульса таймера 7. Двигатель переходит в синхронный режим с периодом коммутации, равным длительности импульса таймера 7 которая определяется сигналом задания скорости При этом по окончании импульса таймера 7 импульсом ГТИ 6 через элемент И 9 в регистр памяти записывается новое состояние сигналов ДПР 5, а импульсом с выхода формирователя 12 (F12) опять запускается таймер 7. Поскольку импульсы
F13 в этом режиме опережают импульсы F12, состояние сигналов СЗ, С2, С1 в момент записи в регистр памяти 4 соответствует 000, а выходные сигналы логического переключателя 14 соответствуют сигналам датчика положения ротора 5 Q(n) Y(n).
Широтно-импульсное регулирование напряжения на выходе коммутатора 2 позволяет ограничить разность между напря0 жением питания обмоток и э.д.с. вращения, снизить потребление реактивной мощности и активные потери в обмотках, что позволяет расширить диапазон регулирования скорости вниз от номинальной.
5 При резком снижении задания скорости длительность импульсов На выходе таймера 7 увеличивается, причем, за счет м еханиче- ской инерции ротора, возможно поступление подряд двух импул Бсов с выхода
0 формирователя 13 между импульсами формирователя 12, что приводит к изменению состояния сигналов СЗ, С2, С1 с 001 на 000 и 011. Формирующийся при этом импульс на выходе логического элемента И 10 (F10
5 на фиг. 3) сбрасывает таймер, на выходе последнего устанавливается лог. 1, разрешающая запись в регистр памяти 4 состояния, предшествующего новому состоянию сигналов ДПР 5: Q(n) Y(n-1) (см. таблицу).
0 Таким образом, осуществляется плавный переход на меньшую скорость вращения, исключается выпадание двигателя из синхронизма за счет ограничения угла отставания коммутации обмоток от сигналов ДПР 5
5 величиной, не превышающей одного межкоммутационного интервала, задаваемого датчиком положения ротора, и меньшей величины межкоммутацио н ного интервала, определяемой сигналом задания скорости
0 (см. t3 на фиг. 3).
При достижении порогового значения скорости вращения, при котором период следования импульсов F13 становится равным, а затем меньшим установленного tO.
5 на выходе порогового элемента 11 устанавливается сигнал с уровнем л ог. 1 (СЗ 1, см. фиг 4). Состояние выходных сигналов логического переключателя 14, в зависимости от сигналов на управляющих С2, С1, соответст0 вует либо текущему состоянию сигналов ДПР50(п) У(п)при СЗ, С2, С1 100, либо следующему состоянию регистра памяти 4 Q(n) Х(п+1) при СЗ, С2, С1 101. При моменте нагрузки, меньшем момента разви5 ваемого двигателем при работе его с заданной скоростью на естественной характеристике с нейтральной самокоммутацией по сигналам ДПР 5, импульсы F13 опережают моменты изменения состояния регистра памяти 4 (импульсы F12) С увеличением нагрузки опережение импульсов F13 (отставание коммутации) уменьшается, а затем импульсы F13 начинают отставать от F12 (опережающая коммутация). При этом чередуются состояния сигналов СЗ, С2, С1 101 и 110. Если, вследствие перегрузки, скорость вращения ротора начинает уменьшаться так, что период следования импульсов F13 становится больше длительности импульса таймера 7 (F7), по окончании импульса F7 в регистр памяти 4 записывается состояние, соответствующее следующему относительно текущего состояния сигналов ДПР 5: Q(n) Y(n+1), т.е. состояние регистра 4 не изменяется, импульс F12 не формируется и перезапуск таймера 7 не происходит. При этом разрешается запись информации в регистр 4 с выхода логического переключателя 14. С изменением сигналов ДПР 5 соответствующее опережающее состояние записывается в регистр памяти 4, а импульсом F12 запускается таймер 7 (см. фиг 4). Этим исключается выпадание двигателя из синхронизма при перегрузке в диапазоне скоростей выше номинальной за счет ограничения угла опережения коммутации величиной, не превышающего одного межкоммутационного интервала, задаваемого ДПР 5.
Таким образом, введение широтно-им- пульсного регулятора, связанного входом с задатчиком частоты, а выходом - с дешифратором, обеспечивает регулирование напряжения на обмотках двигателя пропорционально заданной частоте вращения, что обеспечивает снижение потерь в двигателе при регулировании скорости вниз от номинальной. Введение в известное устройство второго формирователя узких импульсов, порогового элемента, двоичного реверсивного двухразрядного счетчика, второго логического элемента И, входа сброса таймера, а также включение логического переключателя между датчиком положения ротора и регистром памяти с соответствующими дополнительными связями позволяет ограничить угол отставания коммутации при резком уменьшении сигнала задания скорости и угол опережения ком- мутации при перегрузке двигателя, работающего в синхронном режиме при скорости выше пороговой, величиной, не превышающей одного межкоммутационного интервала, опеределяемого ДПР, Кроме того, введение указанных элементов и связей позволяет расширить диапазон регулирования скорости выше скорости холостого хода вентильного двигателя, работающего с нейтральной коммутацией. Совокупность указанных признаков обеспечивает достижение поставленной цели.
Формула изобретения
Вентильный электропривод, содержащий синхронный m-фазный двигатель с постоянными магнитами на роторе, фазные обмотки которого соединены с выходами вентильного коммутатора, связанного управляющими входами через дешифратор с выходами m-рарзрядного регистра памяти,
датчик положения ротора с m чувствительными элементами, генератор тактовых импульсов, таймер, соединенный управляющим входом с источником задающего сигнала, а его выход соединен с первым входом первого логического элемента И, выход которого связан с управляющим входом логического элемента И, выход которого связан с управляющим входом регистра памяти, первый формирователь узких
импульсов, входы которого соединены с выходами m-разрядного регистра памяти, а его выход связан с входом запуска таймера, отличающийся тем, что, с целью расширения диапазона регулирования частоты вращения и повышения точности регулирования в переходных режимах, в него введены второй формирователь узких импульсов, пороговый элемент, логический пе- реключатель, двоичный реверсивный
двухразрядный счетчик, второй логический элемент И, широтно-импульсный регулятор, выход первого формирователя узких импульсов соединен с суммирующим входом реверсивного счетчика, выходы первого и
второго разрядов которого связаны соответственно с первым и вторым управляющими входами логического переключателя и с входами второго логического элемента И, выход которого соединен с входом сброса
таймера, входы второго формирователя узких импульсов соединены с выходами датчика положения ротора, а выход второго формирователя - с входом порогового элемента и вычитающим входом реверсивного
счетчика, выход порогового элемента подключен к третьему управляющему входу логического переключателя, выходы которого соединены с информационными входами регистра памяти, первая группа m входов
логического переключателя связана с выходами регистра памяти, а вторая группа m входов логического переключателя соединена с выходами датчика положения ротора, широтно-импульсный регулятор связан входом с источником задающего сигнала, а его выход соединен с блокирующим входом дешифратора, выход генератора тактовых импульсов соединен с вторым входом первого логического элемента И,
.I й Т з ...I... I ; l ч.L.i 1„У L -L.L i Lj. i, J ,2 | з J 4
« nUEHIOil Ti Т1Жя№Г4|ЈЗД Ti. JIT
fV Г9
f 10. f I
IL J.J.. L i. 1 .Jl(T.
...1JL JJL l. -L JL.
-JL
fui
м LI LJ1II
Lfiri I l Jl JK II - IIL
ri..ru i j i rif
i I f i )
Фиг-
L.
L
I
JL r.
T| | «. | i 2 f i.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Электропривод переменного тока | 1985 |
|
SU1378000A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
