честве вертикального, наклонного или горизонтального.
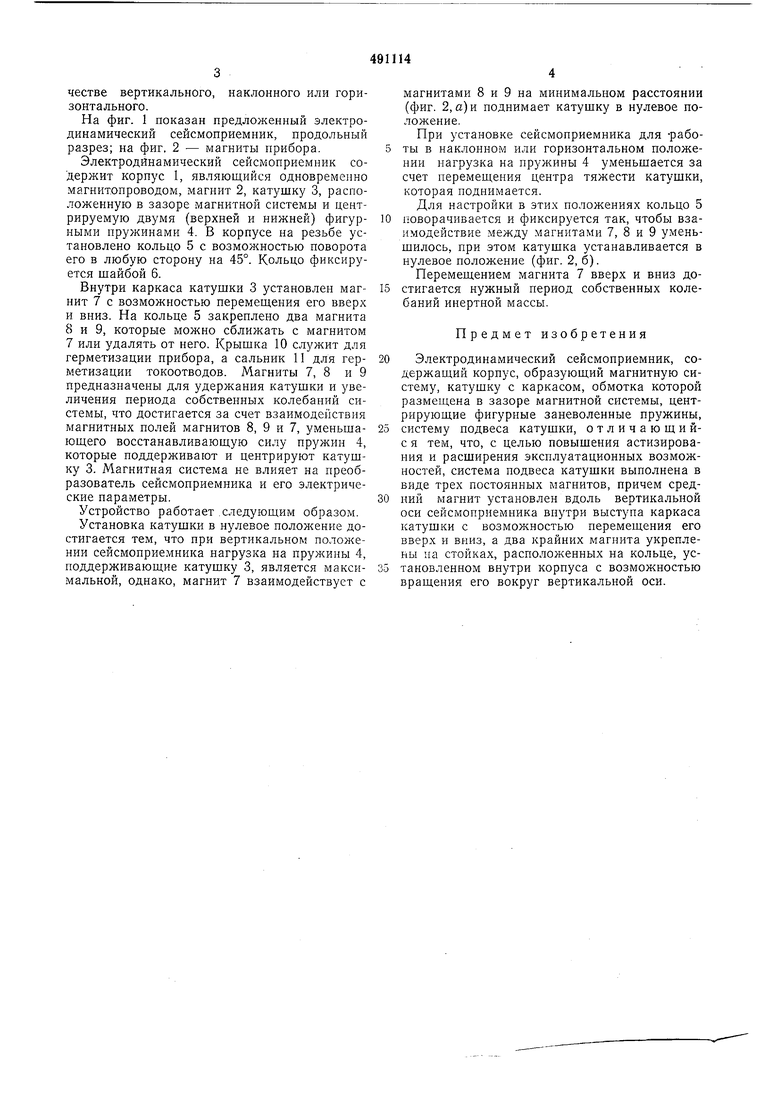
На фиг. 1 показан предложенный электродинамический сейсмоприемник, продольный разрез; на фиг. 2 - магниты прибора.
Электродинамический сейсмоприемник содержит корпус 1, являющийся одновременно магнитопроводом, магнит 2, катушку 3, расположенную в зазоре магнитной системы и центрируемую двумя (верхней и нижней) фигурными пружинами 4. В корпусе на резьбе установлено кольцо 5 с возможностью поворота его в любую сторону на 45°. Кольцо фиксируется шайбой 6.
Внутри каркаса катушки 3 установлен магнит 7 с возможностью перемеш,ения его вверх и вниз. На кольце 5 закреплено два магнита 8 и 9, которые можно сближать с магнитом 7 или удалять от него. Крышка 10 служит для герметизации прибора, а сальник 11 для герметизации токоотводов. Магниты 7, 8 и 9 предназначены для удержания катушки и увеличения периода собственных колебаний системы, что достигается за счет взаимодействия магнитных полей магнитов 8, 9 и 7, уменьшаюш.его восстанавливающую силу пружин 4, которые поддерживают и центрируют катушку 3. Магнитная система не влияет на преобразователь сейсмоприемника и его электрические параметры.
Устройство работает .следующим образом.
Установка катушки в нулевое полол ение достигается тем, что при вертикальном положении сейсмонриемника нагрузка на прулсины 4, поддерживающие катушку 3, является максимальной, однако, магнит 7 взаимодействует с
магнитами 8 и 9 па минимальном расстоянии (фиг. 2, а) и поднимает катушку в нулевое положение.
При установке сейсмоприемника для -работы в наклонном или горизонтальном положении нагрузка на пружины 4 уменьшается за счет перемещения центра тяжести катушки, которая поднимается.
Для настройки в этих положениях кольцо 5 поворачивается и фиксируется так, чтобы взаимодействие между магнитами 7, 8 и 9 уменьшилось, при этом катушка устанавливается в нулевое положение (фиг. 2, б).
Перемещением магнита 7 вверх и вниз достигается нужный период собственных колебаний инертной массы.
Предмет изобретения
Э.1ектродинамический сейсмонриемник, содержащий корпус, образующий магнитную систему, катушку с каркасом, обмотка которой размещена в зазоре магнитной системы, центрирующие фигурные заневоленные пружины,
систему подвеса катущки, отличающийс я тем, что, с целью повышения астизирования и расширения эксплуатационных возможностей, система подвеса катушки выполнена в виде трех постоянных магнитов, причем средНИИ магнит установлен вдоль вертикальной оси сейсмоприемпика внутри выступа каркаса катушки с возможностью перемещения его вверх и вниз, а два крайних магнита укреплены на стойках, расположенных на кольце, установленном внутри корпуса с возможностью вращения его вокруг вертикальной оси.
Q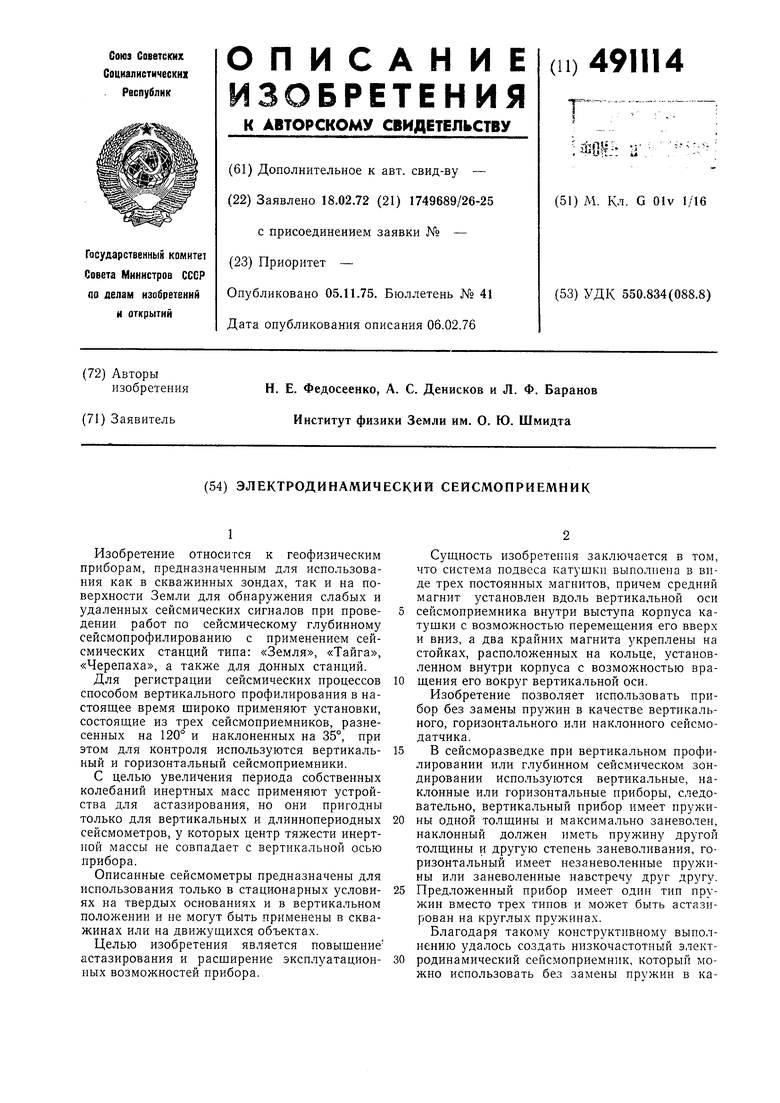
| название | год | авторы | номер документа |
|---|---|---|---|
| Электродинамический сейсмоприемник | 1967 |
|
SU475581A1 |
| Электродинамический сейсмоприемник | 1979 |
|
SU918915A1 |
| СЕЙСМОПРИЕМНИК | 1992 |
|
RU2047189C1 |
| Скважинный сейсмометр | 1981 |
|
SU996970A1 |
| Электродинамический сейсмоприем-НиК | 1978 |
|
SU811173A1 |
| Электродинамический сейсмоприемник | 1982 |
|
SU1056105A1 |
| ЭЛЕКТРОДИНАМИЧЕСКИЙ СЕЙСМОПРИЕМНИК | 1973 |
|
SU363059A1 |
| Электродинамический сейсмоприемник | 1983 |
|
SU1193496A1 |
| СЕЙСМОПРИЕМНИК | 1992 |
|
RU2046375C1 |
| Электродинамический сейсмоприемник | 1960 |
|
SU134454A1 |
9uz.i
Фиг.г..
