Изобретение относится к приборам для измерения параметров вибраций путем их преобразования в электрический сигнал.
Известен сейсмоприемник, содержащий корпус, инерционную массу, датчик вертикального перемещения инерционной массы и четыре постоянных магнита. При этом два магнита закреплены в верхней и нижней частях корпуса и обращены друг к другу одноименными полюсами. Два других магнита закреплены на инерционной массе в ее верхней и нижней частях с возможностью взаимодействия с первыми двумя магнитами на притяжение вверху и на отталкивание внизу [1]
Недостатком известного сейсмоприемника является его низкая чувствительность из-за того, что магнитный подвес инерционной массы осуществляется действием продольных (вертикальных) магнитных сил.
Известен сейсмоприемник, содержащий корпус, вертикально установленный в корпусе полый ферромагнитный цилиндр, инерционную массу, выполненную в виде вертикально ориентированного постоянного магнита, расположенного внутри указанного ферромагнитного цилиндра, поперечный центратор инерционной массы для обеспечения возможности ее вертикального перемещения, а также датчик вертикального перемещения инерционной массы [2]
Недостатками известного сейсмоприемника являются низкий коэффициент демпфирования инерционной массы и низкая помехозащищенность сейсмоприемника от внешних магнитных полей.
Признаки прототипа, совпадающие с существенными признаками заявляемого изобретения, заключаются в наличии корпуса, полого ферромагнитного цилиндра, инерционной массы, поперечного центратора инерционной массы и датчика вертикального перемещения инерционной массы.
Причиной, препятствующей получению в прототипе требуемого технического результата, является выполнение инерционной массы в виде одного постоянного магнита, расположенного внутри ферромагнитного цилиндра и, вследствие этого, необходимость располагать внутри этого ферромагнитного цилиндра в непосредственной близости от инерционной массы как демпфирующих элементов, так и датчика вертикального перемещения инерционной массы.
Сущность изобретения заключается в следующем.
Изобретение направлено на повышение коэффициента демпфирования инерционной массы, обеспечение возможности его регулирования и повышение защищенности сейсмоприемника от внешних магнитных полей.
Технический результат, который может быть получен при осуществлении изобретения, заключается в увеличении пространства, необходимого для размещения демпфирующих элементов и датчика вертикального перемещения инерционной массы, а также в компенсации воздействия внешнего магнитного поля на один магнит инерционной массы, таким же воздействием, но с противоположным знаком, на другой магнит инерционной массы.
Существенные признаки, характеризующие изобретение, заключаются в следующем.
Ограничительные признаки: корпус; вертикально установленный в корпусе полый ферромагнитный цилиндр; инерционная масса; поперечный центратор инерционной массы для обеспечения возможности ее вертикального перемещения; датчик вертикального перемещения инерционной массы.
Отличительные признаки: второй полый ферромагнитный цилиндр, вертикально установленный в корпусе соосно с упомянутым первым ферромагнитным цилиндром; инерционная масса выполнена в виде двух вертикально ориентированных постоянных магнитов, которые соосно расположены внутри соответствующих полых ферромагнитных цилиндров, жестко связаны между собой и обращены друг к другу одноименными полюсами; два стакана из диамагнитного проводящего материала, сверху и снизу охватывающие инерционную массу или один из ее постоянных магнитов.
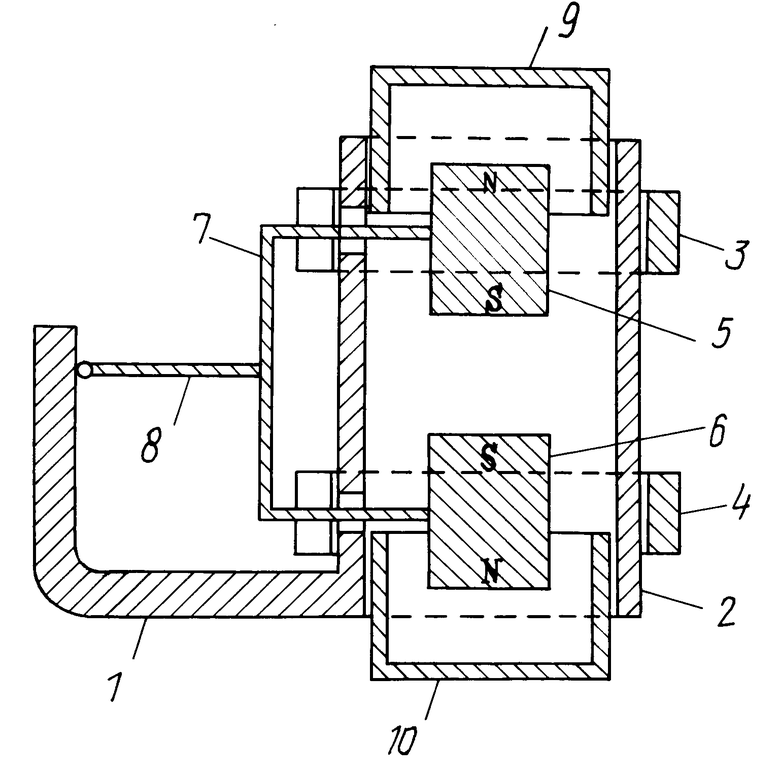
На чертеже схематично показан заявляемый сейсмоприемник.
Сейсмоприемник содержит корпус (не показан), установленное в корпусе основание 1, вертикально закрепленный на основании 1 полый цилиндр 2 из немагнитного непроводящего материала, два полых ферромагнитных цилиндра 3 и 4, которые выполнены в виде незамкнутых (разрезных) колец, ориентированных осями вертикально и охватывающими боковую поверхность цилиндра 2 в его верхней и нижней частях; два постоянных магнита 5 и 6, которые ориентированы полюсами вертикально и навстречу друг другу одноименными полюсами, расположены внутри соответствующих ферромагнитных цилиндров 3 и 4 и жестко соединены между собой посредством скобы 7, образуя тем самым инерционную массу; тягу 8, посредством которой инерционная масса соединена шарнирно с основанием 1, так что тяга 8 образует поперечный центратор инерционной массы для обеспечения возможности только вертикального перемещения инерционной массы; два стакана 9 и 10, выполненных из диамагнитного проводящего материала, причем эти стаканы посредством резьбы установлены в верхней и нижней частях цилиндра 2 посредством резьбы (не показана), так что верхний стакан 9 своей внутренней полостью охватывает верхний магнит 5 инерционной массы сверху, а нижний стакан 10 своей внутренней полостью охватывает нижний магнит 6 инерционной массы снизу. При этом в расположении стаканов 9 и 10 возможны варианты. В частности, оба стакана могут охватывать сверху и снизу лишь какой-либо один магнит 5 или 6 инерционной массы. Однако показанный на чертеже вариант является наиболее удобным для регулируемого вертикального перемещения стаканов 9 и 10 относительно цилиндра 2. Во всех этих вариантах стаканы выполняют функцию регулятора коэффициента демпфирования. Кроме того, сейсмоприемник имеет датчик вертикального перемещения инерционной массы (не показан). Датчик может иметь различное конструктивное исполнение, например в виде каркасной катушки, расположенной внутри цилиндра 2. Выполнение инерционной массы из двух магнитов дает для этого достаточно места. Сейсмоприемник может содержать также демпфирующие кольца, стационарно закрепленные вблизи полюсов магнитов 5, 6 (кольца не показаны), для чего внутри цилиндра 2 также имеется достаточно места. Демпфирующие кольца, однако, лишь увеличивают коэффициент демпфирования, но не дают возможности его регулировать. Эту возможность обеспечивают стаканы 9 и 10.
Работа сейсмоприемника заключается в следующем.
Колебательное воздействие на корпус приводит к относительному вертикальному перемещению инерционной массы (магниты 5, 6) благодаря ее магнитному подвесу. Указанный подвес обусловлен действием поперечных магнитных сил притяжения между магнитами 5, 6 и соответствующими ферромагнитными цилиндрами 3, 4, а также наличием поперечного центратора (тяга 8), обеспечивающего инерционной массе необходимую устойчивость. Вертикальные колебания инерционной массы (магниты 5, 6) соответствующим индуктивным датчиком преобразуются в электрический сигнал. При этом регулирование коэффициента демпфирования инерционной массы осуществляют вертикальным перемещением стаканов 9 и 10, т.е. путем изменения расстояния между этими стаканами и соответствующими магнитами 5, 6 инерционной массы. Регулирование собственной частоты колебательной системы сейсмоприемника осуществляют как наклоном ферромагнитных цилиндров 3, 4 относительно оси цилиндра 2, так и изменением расстояния между ферромагнитными цилиндрами 3, 4. Изменение расстояния между цилиндрами 3, 4 имеет наибольший эффект, так как в этом случае могут появляться вертикальные растягивающие или сжимающие магнитные силы, действующие на инерционную массу. Если эти силы, например, растягивающие, то имеет место эффект астазирования, значительно повышающий чувствительность сейсмоприеника. Если эти силы сжимающие (при уменьшении упомянутого расстояния), то жесткость магнитного подвеса увеличивается.
Защищенность от внешнего магнитного влияния в сейсмоприемнике обеспечивается без экранирования, а за счет направленности одноименных полюсов магнитов 5, 6 навстречу друг другу. В этом случае внешнее магнитное поле воздействует одинаково на оба магнита 5, 6, но результирующее действие будет нулевым, так как реакции магнитов 5, 6 на это воздействие будут взаимно нейтрализоваться.
| название | год | авторы | номер документа |
|---|---|---|---|
| СЕЙСМОПРИЕМНИК | 1992 |
|
RU2047188C1 |
| СЕЙСМОПРИЕМНИК | 1990 |
|
RU2045080C1 |
| САМОУСТАНАВЛИВАЮЩИЙСЯ ТРЕХКОМПОНЕНТНЫЙ СЕЙСМОПРИЕМНИК | 1992 |
|
RU2046374C1 |
| СЕЙСМОПРИЕМНИК | 1992 |
|
RU2046375C1 |
| СЕЙСМОПРИЕМНИК | 1992 |
|
RU2018155C1 |
| СЕЙСМОПРИЕМНИК | 1990 |
|
RU2017175C1 |
| ЛЕВИТАЦИОННАЯ СИСТЕМА | 1992 |
|
RU2037436C1 |
| Сейсмоприемник | 1986 |
|
SU1436079A1 |
| Индуктивный датчик вибраций | 1981 |
|
SU1432342A1 |
| Сейсмоприемник | 1979 |
|
SU842678A1 |
Использование: измерение параметров вибраций. Сущность изобретения: сейсмоприемник содержит корпус, установленное в корпусе основание, два ферромагнитных цилиндра, два постоянных магнита инерционной массы, скобу для жесткой связи магнитов, тягу, выполняющую роль поперечного центратора инерционной массы, два стакана из диамагнитного проводящего материала для регулирования коэффициента демпфирования инерционной массы. Между магнитами и соответствующими цилиндрами действуют силы магнитного притяжения. Это обеспечивает эффект поперечной магнитной растяжки для магнитного подвеса инерционной массы. Регулирование собственной частоты колебаний сейсмоприемника осуществляют изменением расстояния между ферромагнитными цилиндрами. 1 ил.
СЕЙСМОПРИЕМНИК, содержащий корпус, вертикально установленный в корпусе полый ферромагнитный цилиндр, инерционную массу, поперечный центратор, посредством которого инерционная масса связана с корпусом, и датчик перемещения инерционной массы, отличающийся тем, что он дополнительно содержит второй полый ферромагнитный цилиндр и вертикально закрепленный в корпусе полый цилиндр из немагнитного материала, боковую поверхность которого в верхней и нижней частях охватывают полые ферромагнитные цилиндры, установленные соосно, инерционная масса выполнена в виде двух вертикально ориентированных постоянных магнитов, соосно расположенных внутри полого цилиндра из немагнитного материала, при этом постоянные магниты жестко связаны между собой и обращены друг к другу одноименными полюсами, а инерционную массу сверху и снизу охватывают два стакана из диамагнитного проводящего материала.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Сейсмоприемник | 1986 |
|
SU1436079A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
