Настоящее изобретение касается устройства для стабилизации по вертикали движущихся тел, причем эта стабилизация производится при помощи маятников.
В современной технике известны несколько типов маятников с большим периодом колебаний.
Основным типом маятника является математический маятник, т. е. какое-то тело, подвещенное на тонкой нити.
Основное уравнение периода этого маятника имеет вид:
где Т-время в секундах, за которое маятник проходит путь между двумя одинаковыми фазами, /-длина маятника в метрах, -ускорение силы тяжести в м/сек.
Для выявления необходимой длины математического маятника допустим, что период колебаний маятника равен Г 40 сек. Тогда длина маятника получится равной
40 9,81
1-.
400 м. 4-2
Осуществить на практике такой длинный маятник не представляется возможным, а тем более невозможно установить его на самолете.
Таким образом нельзя получить большой период колебаний маятника только за счет его длины.
Следующий тип маятника - физический.
Период колебаний физического маятника выражается формулой:
Г 2-1/
G-r
где /-момент инерции маятника относительно оси веса О-вес маятника
г-расстояние центра тяжести маятника до оси подвеса.
Физический маятник можно заменить математическим, имеющим тот же период. Тогда приведенная длина математического маятника будет выражаться уравнением:
/G
/ , где т - .
т-гg
В случае, если маятник будет иметь форму диска с радиусом в 10 см, s приведенная его длина будет равна 400 м при периоде сек., то для величины г, равной расстоянию между центром тяжести маятника и осью подвеса, получается 0,00002 .и, что практически невыполнимо.
Кроме того, маятник с такой малой величиною г был бы мало чувствителен.
в сейсмографии применяется маятник, качающийся в наклонной плоскости. Период колебаний такого маятника будет больше нормального, потому что а знаменатель войдет вес, умноженный на косинус угла наклона маятника.
Применить такой маятник на самолете невозможно, потому что самая плоскость наклона маятника меняет свое положение и период колебаний маятника при разных углах крена будет неодинаков, но если бы даже этого не было, то большой период такого маятника, в виду конструктивной ограниченности его длины, дал бы слишком небольшой угол наклона маятника, а это сделало бы маятник слишком нечувствительным.
Креномер представляет собой маятник с большим периодом колебаний (30-70 сек.). Такой маятник вполне подошел бы для измерения угла крена самолета, но судовые креномеры очень тяжелы и громоздки.
Вес креномера доходит до 300-400 л:г. Понятно, что на самолет такой маятник ставить нельзя.
Наконец есть еще один вид маятника с большим периодом. Это гироскопический маятник. Этот тип маятника здесь не рассматривается, так как настоящее изобретение преследует цель подыскания замены такому сложному и дорогому прибору, каким является гироскоп.
В основу настоящего изобретения положена следующая теоретическая предпосылка.
Периодическое движение всякой точки, каким бы сложным оно ни было, можно разложить на ряд составляющих простых синусоидальных движений по (Методу Фурье.
При исследовании движений некоторых точек механизмов используются для этой цели специальные приборы, называемые гармоническими анализаторами.
Идея предлагаемого устройства заключается в том, чтобы при помощи относительно простого прибора получить обратное, а именно суммировать отдельные движения точек и определить результирующую. Поставленная задача имеет целью получение маятника с большим периодом колебаний при помощи двух маятников, близких по периоду один к другому.
Суммарное движение будет также периодическим. При этом амплитуда суммарного движения будет постепенно возрастать до определенного максимума, после которого начнет убывать до нуля и затем опять возрастать до своего максимума, т. е. получаются так называемые биения. Период этих биений будет значительно превосходить период движения каждого из маятников. Период биений, выраженный в функции периода двух составляющих движений, будет выражаться уравнением:
/ 1Ли
гпГ- 1.СК.
Ч 1
Таким образом, в случае незатухающих колебаний можно путем уменьшения знаменателя, т. е. разности двух составляющих периодов получить сколько угодно большой период биений.
Период биений стремится к бесконечности. Очевидно, при разности Го -Т 0 никаких биений не будет. Однако, и в этом случае будет колебательное движение с периодом Тг 1 и амплитудой, равной сумме амплитуд составляющих движений.
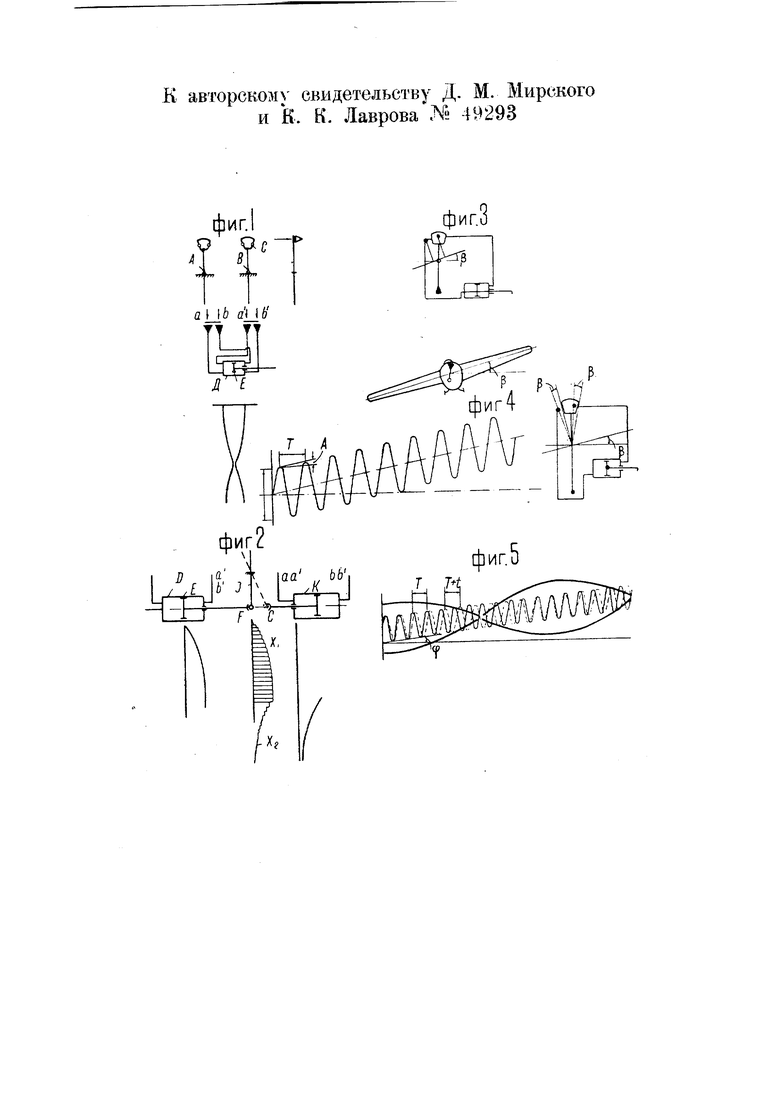
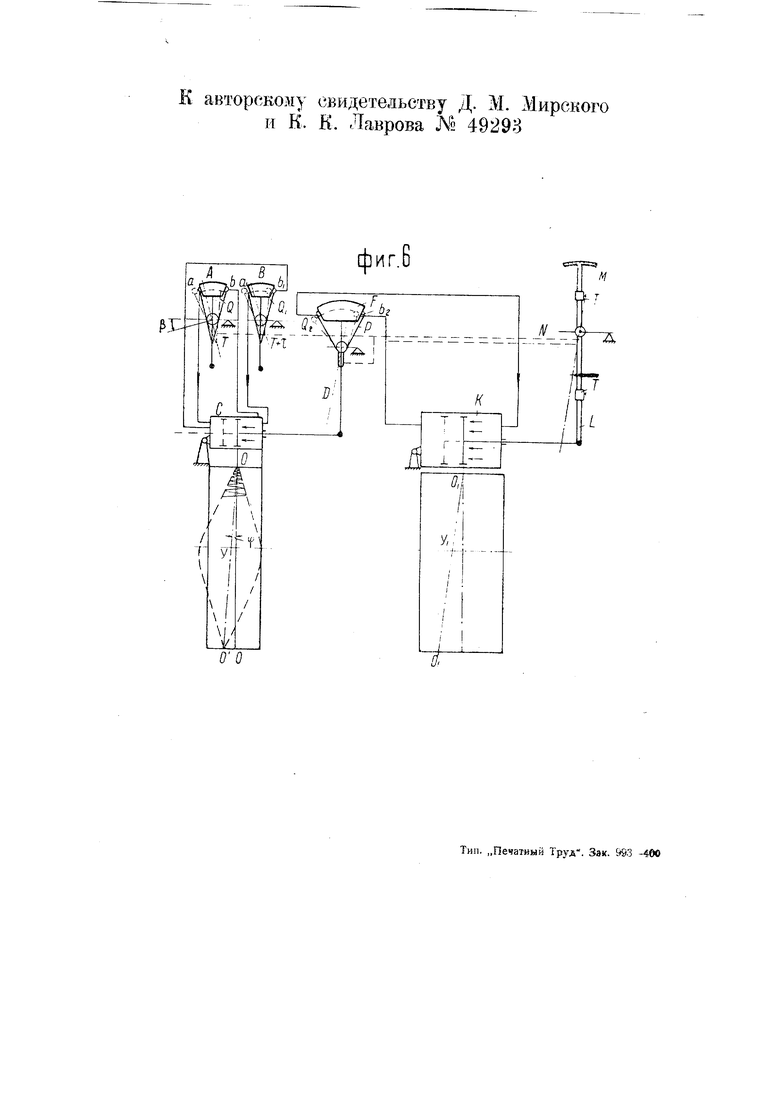
На чертеже фиг. 1 изображает принципиальную схему механизма для создания биений; фиг. 2--схему построения кривой, огибающей биения;фиг.З-схему действия дутьевых сопел при крене самолета; фиг. 4-график колебаний поршня при крене; фиг. 5 - график смещения оси биений при крене; фиг. 6-конструктивную схему устройства.
Пусть имеются два маятника А В (фиг. 1) с периодами колебаний Т- и Г, сек. Конструктивно верхняя часть каждого маятника сделана в виде плоской тонкой заслонки С. Заслонка находится между двумя воздухопроводами а и Ь, по которым идет сжатый до давления р воздух, Воздухопроводы идут к цилиндру D специальной машины, имеющей поршень Е со штоком. Инерцией штока и поршня можно пренебречь. Нормально при отсутствии колебаний маятника заслонка перекрывает дутьевые и приемные сопла воздухопровода и воздух в цилиндр машины не попадает.
При колебании заслонка открывает то одно, то другое приемное сопло и воздух начинает поступать попеременно
то в одну, то в другую полость цилиндра, приводя в колебательное движение поршень. Период этого движения будет равен периоду колебания заслонки маятника,
Второй маятник, по условию, колеблется с периодом, разнящимся от первого маятника.
Если приемные сопла от второго маятника приключить также к цилиндру D, то, очевидно, поршень, получая новые импульсы, должен колебаться также и по закону движения второго маятника. Таким образом, в цилиндре с поршнем алгебраически суммируются импульсы от двух колебательных систем и, следовательно, движение поршня в этом случае будет носить характер биений.
Рассмотрение движения поршня В лучше всего начать с нулевой фазы, когда поршень находится в нейтральном положении. При колебательном движении поршня конец штока с упором, вследствие биений, постепенно, маленькими толчками, будет отводить шарик балансира вправо от среднего положения. Трение в подшипнике балансира настолько велико, что последний находится в том положении, в какое его поставит упор и сам возвраш,аться в свое нейтральное положение не может.
Следовательно, под действием прерывающихся толчков, конец балансира опишет ступенчатую кривую, очень близко совпадающую с огибающей биений.
Таким путем можно получить огибающую с амплитудами от нуля до максимума.
Второй участок огибающей от максимума до нуля, очевидно, данный поршень снять не может. Чтобы получить этот участок огибающей, ставят второй цилиндр К с поршнем. В этот цилиндр сжатый воздух поступает из тех же воздухопроводов а и Ь, что и в цилиндр D. Разница состоит в том, что дутье здесь поступает сразу от двух правых или двух левых сопел, тогда как в первый цилиндр дутье идет от разноименных сопел.
Таким образом поршень L во втором цилиндре движется по тому же закону биений, что и поршень Е, но он смещен по фазе на 180°. Балансир связан с обоими штоками гибкой связью, позволяющей работать обоим поршням совместно. Технически достигнуть этого можно лишь в том случае, если количество воздуха, поступающее в приемные сопла, будет распределяться строго поровну между двумя цилиндрами D и К. Если будет какая-нибудь разница в количестве вoздyxa то соответственная разница получится и между амплитудами колебаний первого и второго поршня, но период биений обоих поршней будет один и тот же, так как биения зависят от одних и тех же периодических колебаний ведущих маятников А и В.
Итак, второй цилиндр / ставят с таким расчетом, чтобы в нейтральном положении его упор подходил к балансиру /, уже повернутому до своего максимума упором F первого поршня. Тогда, при движении поршня его упор будет отводить толчками конец балансира обратно в прежнее положение.
Балансир опишет ступенчатую кривую Х, совпадающую с законом биений Xz второго поршня. Получается кривая движения А , Л , балансира за один период биений, но эта кривая учитывает только изолированное действие толкающих балансир упоров. На самом деле вид кривой будет иной. Это следует из того, что во время движения одного упора второй также движется. Вместе они дадут несколько другой характер движения балансира.
Сущность принципиальной рабочей схемы устройства заключается в том, что биения , A.j поршней смещены по фазе с таким расчетом, что когда у одного поршня биения имеют узел, у другого-пучность и наоборот. Поршень L, кроме этого, смещен на половину своего
хода - (от оси О - О балансира). Ось
О - О образует угол 90 с поршнем h в нейтральном положении. При колебательном движении поршней, очевидно, каждый поршень будет передвигать конец балансира по закону огибающей своих собственных биений. Сложив графически эти две системы огибающих, получают окончательно периодический закон движения конца балансира.
На основании изложенного можно сделать следующие выводы:
1) балансир периодически перемещается только по одну сторону от оси подвеса О - О;
2)амплитуда колебания конца балансира является алгебраической суммой Здмплитуд и двух биений Xi и о, смещенных по фазе и по ходу;
3)период колебания балансира равен периоду биений поршней.
Таким образом, данная схема дает возможность осуществить механизм колебаний с большим периодом.
Пусть теперь описанный выше механизм с большим периодом колебаний мы установили на самолете. Работа этого механизма в самолетных условиях будет следующей.
Если самолет дал небольшой крен (фиг. 3), то дутьевые и приемные сопла а и а, h и Ь, жестко связанные с самолетом, отклонятся от вертикальной оси маятника на угол крена |3°. В этом случае маятник при своем колебании около вертикали будет уже неравномерно перекрывать сопла. Одно сопло будет открыто несколько ббльщее время, нежели другое. Эта различная длительность перекрытия сопел изменит закон колебания поршня Е.
Когда сопла были расположены симметрично относительно вертикали, то при колебаниях маятника закон движения поршня имел синусоидальный характер.
Y-А sin 2тс -у-
Теперь же маятник будет закрывать одно сопло раньше, чем другое, и, соответственно, закрытие второго сопла будет происходить позже, нежели у первого.
Следовательно, размах колебаний поршня Е в одну сторону будет делаться все меньше и меньше, зато в другую сторону размах поршня будет постепенно нарастать.
В случае незатухающих колебаний маятника получится такое положение, что насколько уменьшится размах в одну сторону от нейтрали, настолько же он увеличится по другую сторону. Графически колебания поршня изображены на фиг. 4. Угол наклона f кривой к оси X определяется из уравнения
Д J tgr- у.
где -J -разница в размахе между двумя последовательными колебаниями поршня, Т-период колебания маятника и поршня. Величина Д А может быть выражена уравнением:
4 А -- .- 2-360
-де--размах колебания и J5 - угол
крена.
Таким образом, смещение сопел относительно вертикали маятника даст также периодические колебания поршня, причем нейтральная ось колебаний будет смещена на угол у, являющийся функцией смещения сопел.
При сложении двух колебаний, имеющих какие-то смещения сопел и периоды, незначительно отличающиеся друг от друга, получатся биения.
Характер биений будет определяться, в конечном счете, углами -fi и -р2 которые зависят от смещения сопеп и размахов колебаний двух ведущих маятников. Можно так подобрать размахи и периоды двух маятников, что при одинаковом угле смещения сопел углы 9i и fg будут равны. Тогда ось биений будет расположена под тем же углом f., -f, что и оси слагаемых колебаний (фиг. 5). Равенство углов возможно при условии, когда соблюдается следующее отношение: 4А
fi т I пft--г f,-.-,I
7f;i где Т /2- /1 и . - 1 |
Выдержать равенство углов -р важно для практического применения этого механизма. Ибо только при равенстве углов -pi f о кривая биений будет итти равномерно и без острых пик.
Итак, крен самолета вызывает смещение сопел. При смещении сопел кривая биений имеет свой особый характер.
При ограниченной длине хода поршней балансир будет иметь участок стояния.
Участок этот будет расти, так как нейтральная ось балансира имеет смещение на угол 9.
Таков принципиальный закон движения балансира при смещенных соплах.
Практически балансир будет итти несколько по другому закону. Объяснить это можно следующим обстоятельством. Как только самолет дал крен, сопла выходят за заслонки маятников и воздух начинает поступать в цилиндры.
В цилиндр D дутье поступает в разные полости, следовательно поршень будет стоять на месте до тех пор, пока не пойдут маятники. В цилиндр К воздух поступает в одну и ту же полость, следовательно поршень при крене сразу же получит движение, а раз так, то колебание поршня при ходе маятников начнется с того положения, в какое он был поставлен до хода маятников.
Можно сделать так, что колебание поршня начнется от определенной точки, в связи с чем и делают шток балансира соответствующей длины.
На практике может быть случай, когда самолет войдет в крен настолько медленно и плавно, что маятники не получат колебаний. Тогда поршень D будет стоять на месте и балансир / не получит никакого перемещения. Следовательно, прибор не сможет исправить крена. Для устранения этого необходимо дать преобладание давления в одной полости цилиндра над другой. Практически это достигается усилением дутья в обоих соплах одного из маятников. Тогда балансир получит перемещение, которое может быть передано дальше и такой крен будет исправлен.
Еще представляет интерес влияние быстро затухающих колебаний маятников на перемещение балансира. Все приведенные выше кривые были построены в предположении, что колебания маятников будут незатухающими. На самом деле этого, конечно, не будет.
Как отразится быстрое затухание маятников на работе прибора, может показать только эксперимент.
Есть основание думать, что вообще затухание балансира может отразиться на работе прибора, изготовленного по этой схеме. В самом деле, ведь как только самолет получил крен, в тот же момент передвинулся и балансир, а следовательно сработали элероны. От элеронов идет следящая система на балансир. Назначение этой системы и состоит в том, чтобы возвратить балансир в его
первоначальное положение лишь в тот момент, когда сработали элероны и самолет начал выравнивание, а раз так. то затухание может отразиться на работе прибора в том случае, когда период биений балансира не совпадает с периодом возвращения самолета из крена, но совпадение этих периодов, при надлежащем подборе элементов схемы, невозможно. Поэтому можно итти к выводу, что балансир должен возвращаться в свое первоначальное положение только следящей системой, и спадающая часть биений балансира вообще для реального прибора никакой роли не играет. От балансира важно получить только первый толчок во время его выхода из нейтрали при крене, а дальше непосредственно следует срабатывание золотника рулевой машинки элеронов и затем самих элеронов.
На основании этих соображений схема всего устройства может быть представлена после введения в нее ряда конструктивных упрощений в следующем виде;
Здесь А и В-два маятника, периоды колебаний которых 7 и Т-}- сек.;
С-поршень воздушной машинки, назначение которого получить биения в результате качания маятников;
а и 1, / и bi - воздухопроводы, перекрываемые маятниками;
F-балансир, щарнирно соединенный со штоком поршня С и совершающий движение по закону огибающих биений; Q и QI - дутьевые сопла от маятников;
Р - дутьевые сопла от балансира;
«3 и Ь., - воздухопроводы, перекрываемыебалансиром;
К-поршень вспомогательного золотника, получающий движение от балансирных воздухо проводов;
L - рычаг, тянущий боуденовский трос М золотника рулевой машины и щарнирно соединенныи со штоком поршня
Л/ - следящая система от элеронов к дутьевым соплам а, а и Р.
Подводя итоги при конструктивной схеме, можно сказать, что работа прибора основывается на следующих основных положениях:
1.Периоды колебаний маятников А и В очень малы (3-5 колебаний в секунду).
2.Период колебаний маятника В больше периода колебаний маятника А
на весьма малую величину сек. I -;, ° 40
3.Дутье через сопла Q и Q от маятников А и В можно дать по силе одинаковым.
4.Поршень цилиндра С, вследствие импульсов от сжатого воздуха, поступающего в цилиндр через воздухопроводы а, ai и Ь, hi получает биения.
5.Ось биении О-О проходит через середину цилиндра с поршнем С, когда маятники колеблются, но самолет идет без крена.
6.Ось биений смещается на угол г
в положение О-Y-О когда самолет получает крен.
7. Балансир iF шарнирно закреплен со штоком поршня С.
8.Поршень цилиндра К принимает импульсы сжатого воздуха через сопла Р, перекрываемые балансиром, но имеет достаточную инерцию, чтобы на биения балансира не реагировать.
9.При крене поршень К движется по закону О,- FJ-Oj, совпадающему с законом смещения оси биений О-У-О поршня С и заслонки F.
10.Рычаг L шарнирно закреплен со штоком поршня /f.
11.От рычага L идет трос М к золотнику рулевой машины, а также жесткие тяги следящей системы Л к дутьевым соплам «3, QI и Р.
12.Грузы Т могут перемещаться вдоль рычага L, меняя тем самым момент инерции поршня.
Предмет изобретения.
1.Устройство для стабилизации по вертикали движущихся тел при помощи маятника, отличающееся тем, что взамен одного маятника с большим периодом колебаний применены два или несколько маятников с малыми периодами, предназначенные создавать биения, с целью передачи посредством того или иного воспринимающего органа величину смещения оси этих биений при крене выравнивающему механизму.
2.Форма выполнения устройства по п. Т., отличающаяся тем, что в качестве органа, предназначенного воспроизводить биения, применен поршень С, помещенный в цилиндре, соединенном посредством трубопровода с сжатым воздухом с дутьевыми и приемными соплами, перекрываемыми известными уже заслонками, установленными на маятниках А и В..
3.Форма выполнения устройства по пп. 1 и 2, отличающаяся тем, что шток поршня ,С шарнирно сочленен с балансиром Д снабженным такой же заслонкой F, служащей для управления выравнивающим механизмом.
4.Форма выполнения устройства по пп. 1-4, отличающаяся тем, что в качестве органа, предназначенного воспринимать величину смещения оси биений при крене применен поршень Л, сочлененный с выравнивающим механизмом и помещенный в цилиндре, соединенном с соплами балансирной заслонкой.
к авторскому свидетельству Д. М. Мирского и К. К. Лаврова 49293
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическое устройство для регулирования температуры охлаждающей воды в двигателях внутреннего горения | 1935 |
|
SU45469A1 |
| САМОЛЕТ В.С.ГРИГОРЧУКА | 1997 |
|
RU2123960C1 |
| СПОСОБ ДИНАМИЧЕСКОГО ВЫРАВНИВАНИЯ СЛОЯ ВОРОХА НА ОЧИСТКЕ ЗЕРНОУБОРОЧНОГО КОМБАЙНА ПРИ РАБОТЕ НА СКЛОНАХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2519850C2 |
| Летательный аппарат короткого взлета и посадки с газодинамическим управлением | 2018 |
|
RU2711760C2 |
| ТРАНСПОРТНЫЙ САМОЛЕТ "САМОЛЕТ В.С.ГРИГОРЧУКА" | 1995 |
|
RU2086478C1 |
| КОМБИНИРОВАННЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ЛЕГЧЕ ВОЗДУХА (ВАРИАНТЫ) | 2006 |
|
RU2318697C2 |
| Вибрационный питатель | 1961 |
|
SU152407A1 |
| Пневматическая паровозная песочница | 1933 |
|
SU37733A1 |
| ГИРОСКОПИЧЕСКИЙ ПРИБОР | 1932 |
|
SU38555A1 |
| СПОСОБ УПРАВЛЕНИЯ КРЕНОМ И ОСАДКОЙ МАССИВНОГО СООРУЖЕНИЯ | 2001 |
|
RU2211288C2 |
фиг.1
о Qf 8
dnl) тт ft
фиг.о
г
хн
к авторскому свидетельству Д. М. Мирског и К. К. Лаврова № 49298
О о
О

