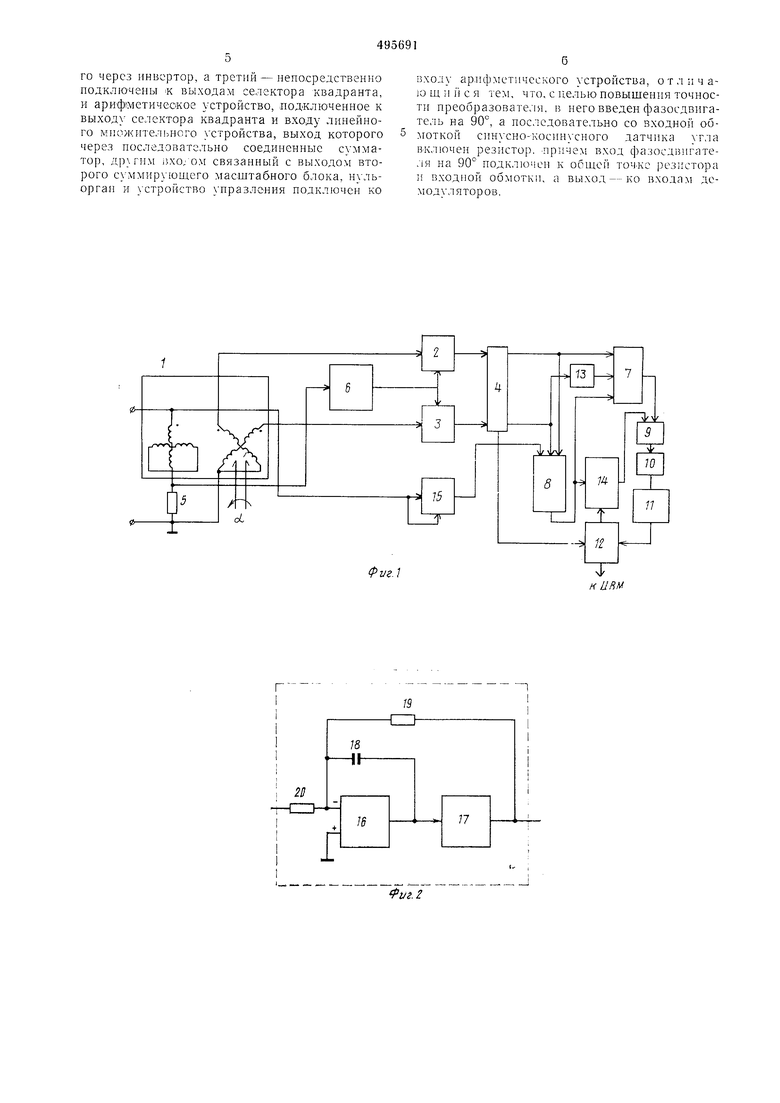
квадранта 4. Между вторым Выходом селектора квадранта 4 и вторым входол с Л1мирующего масштабного блока 7 включен инвертор 13, а между выходом суммирующего маештаб(IOI-0 блока 8, который соединен е третьим входом с ммирую1цего масштабного блока 7, и вторым входом с мматора 9 - линейное множительное уетройетво 14, подключенное к выходу арифметического устройства 12. Третий вход еумм.ируюш,ето масштабного блока 8 соединен с выходом сетевого демодулятора 15, оба входа которого иодключены к сети, иита1он1,ей сннусно-косинуеный датчик 1. Фазоедвигатель на 90° 6 может быт1з выиолаеи на иоследовательно соединенных онеранионном -силителе 16 и развязывающел си,1ителе 17, выход которого является вв1ходом фазосдвнгателя па 90 6. В |фазосдвигателе 6 выход онерациониого усилнтеля 16 через емкость 18 н выход разЗязывакидего усил ггеля 17 через резиетор 19 связаны с инве)тнр 1оHUIM входом оиерациоииого уенлителя 16, который лодключеи к резнетору 20. Дрхлой контакт резистора 20 является входом фазоедвиг а те л я на 90. В нреобразователе угла новорота вала в код входную обмотку сниусио-косин сного I зачитывают напряжением L/sinco/ и е иомощвю резиетора 5, включенного ноеледоватсльно со входной обмоткой, формируют сигнал, фаза которого онределяется фазой тока, протекаю.щего во входной обмотке еинусноК()еииусного датчика 1. Так как ток, протекающий во входной Обмоткс, равен /sin (и/ -90°+(|0, 1ДС с(; -- едвиг аю фазе, вызваннв1Й наличием активного солротивления входной об.мотки н :онечи 1М ИНДУКТИВНЫМ сопротивлением датчика, то на резисторе 5 образуется напряжение 6i;Sin (со/-90 -гф). Пол -ченное нанряжение подают в фазоедвигатель на 90°, в котором оно поступает через резистор 20 на нн1зертир юи1.ий вход операцнонного хснлггге.1Я 16, совместно с емкостью 18 осуи1,еств,)1него интегрирование 1Г5Ходного енгиала, т. е. сдвигает его но фазе иа 90. РазвязываюниИ ус:ил1ггель 17 и резистор 19 обеоиечивают нормальный режнм схемы но постоянному току. В результате фазоедвигатель иа 90° вырабатывает напряжение Оквш (m + cp). Этот сигнал ЗбТем подают на правляющие входы демодуляторов 2 и 3, которые демодулируют выходные сигналы еинусно косинусного датчика 1 t/iin (со/-гф)51па и tysin(co/+cp)icosc,, где ее - угол поворота вала синуено-косинусного датчика 1. Демодуляторы 2 и 3 осуществляют деМ()д 1яцию путем перемножения выходньгх сигналов синосно-косииусного датчика угла с сигналом, поступающим с выхода фазосдвигателя 6, н выделения ностоянных составляющих результирующих сигналов. Таким образом, демодуляторы 2 и 3 вырабатывают на выходе напряжения постоянного тока LJ isina и бдсозсс, которые не зависят от фазового сдвига ф и, следовательно, не нодвержены температурным изменениям. Это происходит потому, что при колебаних температуры окружаюн ей ереды актив ияе опротивления обмоток синусно-косииусного атчика 1 тла изменяются, что приводит к величению или уменьшению фазового сдвига (, но так как выходи1 ;е еигна;1ы еипуенокосннуеного датчика 1 угла и сигнал с выхоа фазосдвнгателя 6 одинаково завиеят от азового сдвига ф, енгналы с выходов дечод ляторов 2 и 3 оказываются не ч вствите.11)ными к температурньгм измеиения.м. Демодулнрованные L-;,.sinc. и Ьдеозсс через ее;1ектор квадранта 4. кото) ириводн их к первому квадрант - гла. и ;iaиряжение с выхода сетевого демодулятора 15 иостунают в с MMiip ionuiii мас1итабный блок 8. В то же время )yioHUui масиггабны 6:iOK 7 Н1)ииил1ает нанряжения (УдЯ;па; с вьгхпда ее.чектора Киадра1гга 4, сигнал с/ с инвертора 13, а такя-;е 1и)1.одио1 1 сит.ча.л с ммир 1ои1его масиггабн()-о блока 8. Суммируюидие и б.кжи сс ществляют с ммироваине указанных нанряженпй с некоторыми AiacujTaoHbiMii коэф фнп -гег1тами а, Ь i; с, значения которьг определены из условия наиболее точного приближепия кода fi. получаемого в преобра.зователс, к а иоворота ва.ла синуспо-косинусиого датчика 1 и соответствнн е .выражением , с а , 5 (sin /. -,- cos -j.) (sin j - cos 7.)j a ; i (sin 2 - cos y.) Таким образом суммнр ки11.нй маеиггабный б;к)к 8 вы|)абатывает .1 )(,ч|по:-г -j-cosa), а )ощий .масштабиый блок 7- сигнал бд-с а-г(sina-f-cosa) Ч-(sina eotfci) I. Линейное множительиое устройство 14 умножает сигиал с выхода схммнрующего масштабного блока 8 иа значение кода р, уст;;новленное в а)нс)метпчсском )стройстве 12, а с мматор 9 и нуль-орган 10 осуществля.ч)т сравнение этого рез льтируюни го еигнала с выходным сигма.лом с ммпру10И1,его мас нтйбиого блока 7. Устройство а1рав;1ення 1 1 HJIOизводит подбор кодов р в арИфметнческом устройстве 12 до тех пор, пока выходное напряженне н)ль-органа 10 не етанет равным нулю. 8этот момент подобранный «од ,р в арифметическом устройстве 12 соответствует значенню угла о: вала спнусно-коеинусного датчика 1. Ф о р м л а н 3 о б э е т е и и я 11реобр;13ователь гла поворота вала в код. содержащий синуено-косннусный датчик тла. выходы которого через демодуляторы подключены к селектор} квадранта, два суммир ющих масштабных блока, два входа одного из которых подключены к выходам еелектора квадранта, третий --- через сетевой демоду.чяjop к синусно-косннусно.му датчику yr;ia, а выход ко входу линейното множительиого устройства и к одному входу второго суммиручоидего маси:табиого блока, второй вход которого через инвертор, а третий - непосредственно подключены « выходам селектора квадранта, и ариф1метнчес«ое устройство, подключенное к выход} селектора квадранта и входу линейного М11ожнтел1зного стройства, выход которого через носледовательно соединенные сумматор, дрхгим iixo; ом связанный с выходом второго сх ммирующего масштабного блока, нульорган и устройство управления подключен ко
б
входу арифметического устройства, отличающийся тем, что, с целью повышения точности преобразователя, в него введен фазосдвигатсль на 90°, а последовательно со входной обмоткой синлсно-косинусного датчика угла ВКлючеи резистор, лричем вход фазосдвпгателя на подключен к общей точ-ке резистора и входной обмотки, а выход - ко входам демодуляторов.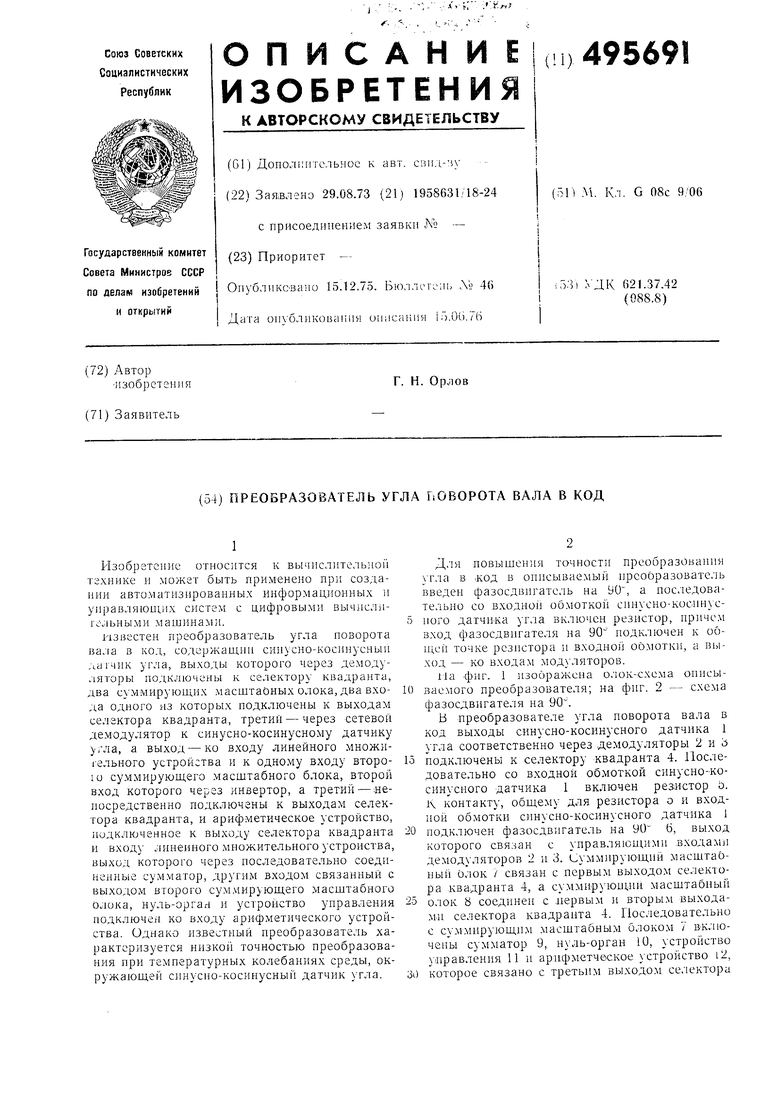

| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь угол-код | 1973 |
|
SU450217A1 |
| Способ преобразования угла поворота в код | 1973 |
|
SU506035A1 |
| Преобразователь угла поворота синуснокосинусного вращающегося трансформатора в код | 1976 |
|
SU595757A1 |
| Цифровой синусно-косинусный преобразователь для формирования радиально-круговой развертки | 1977 |
|
SU640423A1 |
| Преобразователь угол-код | 1973 |
|
SU467390A1 |
| Цифроаналоговая следящая система | 1988 |
|
SU1697055A1 |
| Преобразователь угла поворота вала в код | 1974 |
|
SU501407A1 |
| Преобразователь угла поворота вала в код | 1983 |
|
SU1088045A1 |
| Преобразователь угол-код | 1974 |
|
SU495690A1 |
| Преобразователь угол-код | 1983 |
|
SU1089603A1 |
