Изобретение относится к автоматике и может быть использовано для управления объектами по сигналам от вычислительных устройств.
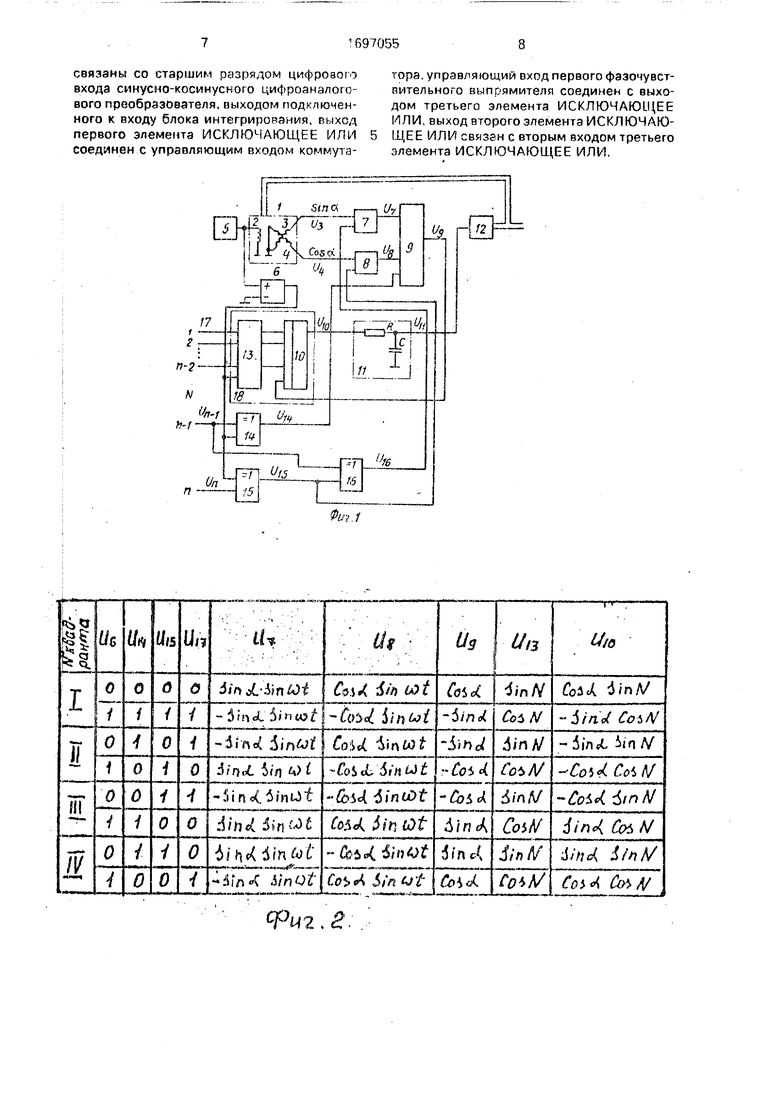
Цель изобретения - упрощение конструкции и повышение надежности. На фиг. 1 представлена блок-схема системы; на фиг. 2 - таблица значений функций; на фиг. 3 - эпюры, поясняющие работу системы.
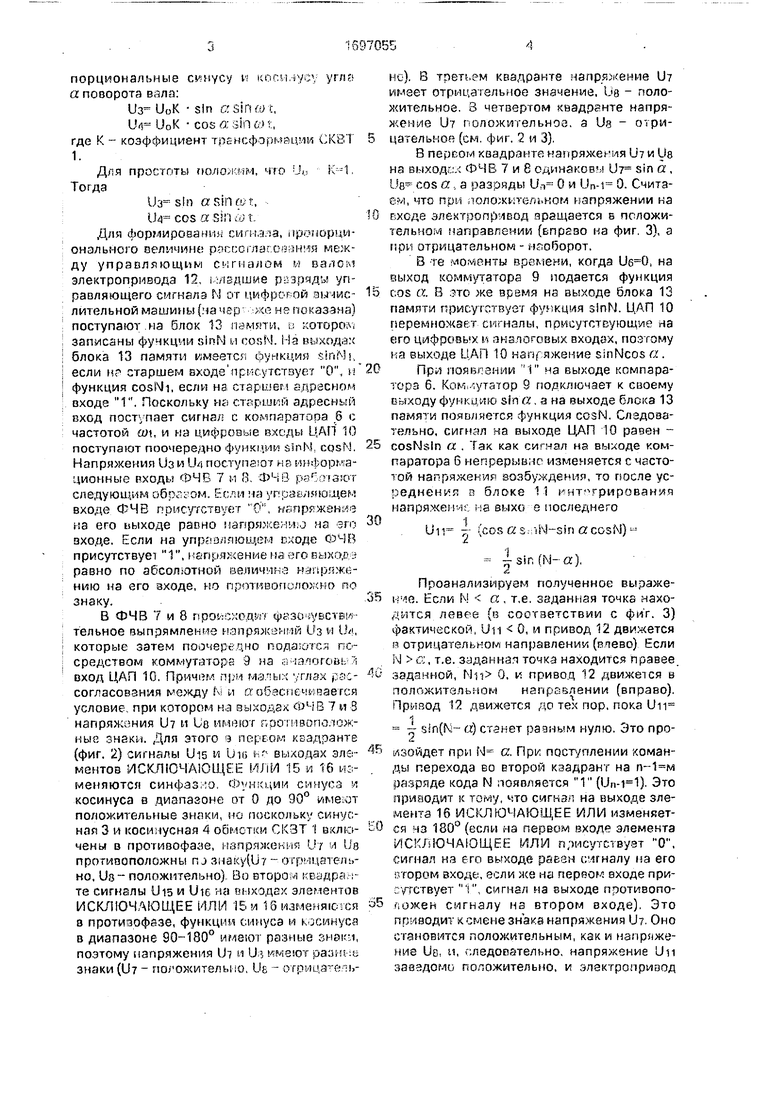
Система содержит датчик угла поворота в виде синусно-косинусного вращающегося трансформатора (СКВТ) 1 с обмоткой 2 возбуждения, а также с синусной 3 и косинусной 4 обмотками, генератор 5 опорной частоты, компаратор б, первый и второй фа- зочувствительные выпрямители (ФЧВ) 7 и 8, коммутатор 9, цифроаналоговый преобразователь 10, блок 11 интегрирования,электропривод 12, блок 13 памяти, первый, второй и третий элементы ИСКЛЮЧАЮЩЕЕ ИЛИ 14-16, шину 17 управления, синусно-кося- нусный цифроаналоговый преобразователь 18.
Работает следящая системе следующим образом.
Генератор 5 опорной частоты формирует напряжение синусоидальной форму он, которое питает обмотку 2 возбуждения СКВТ 1 (фиг. 3). Напряжение Us сравнивается с нулевым компаратором 6: если Us 0, напряжение Ue на выходе компаратора 6 равно 1, если Us 0, напряжение (cM. фиг. 3). На выходных обмотках 3,4 СКВТ 1 формируются напряжения проо ю
xj О
ся ел
порциональные синусу и косинусу угла о. поворота вала:
sin a sin a t, U0K cosasinan, где К - коэффициент трансформации СКВТ 1.
Для простоты положим, что Уо ° К-1, Тогда
Уз sin с sin о) t, - cos a sin a) t.
Для формирования сигнала, пропорционального величине рассогласования между управляющим сигналом и валом электропривода 12, младшие разряды управляющего сигнала N от цифровой вычислительной машины (на чер же не показана) поступают на блок 13 памяти, в котором записаны функции sinN и cosN. На выходах блока 13 памяти имеется функция sinNj, если иг старшем входе присутствует О, и функция cosNi, если на старшем адресном входе 1. Поскольку на старший адресный вход поступает сигнал с компаратора 6 с частотой ол, и на цифровые входы ЦАП 10 поступают поочередно функции sinN, cosN. Напряжения Уз и LM поступают на информационные входы ФЧВ 7 и 8. ФЧВ работают следующим обрезом. Если на управляющем входе ФЧВ присутствует О, напряжение на его выходе равно напряжению на его аходе. Если на управляющем сходе ФЧВ присутствует 1, напряжение на его выходе равно по абсолютной величине напряжению на его входе, но противоположно по знаку.
В ФЧВ 7 и 8 происходит фазочувстви- тельное выпрямление напряжений Уз и УЙ, которые затем поочередно подаются посредством коммутатора 9 на аналоговый вход ЦАП 10. Причем при мапых углах рассогласования между N и а. обеспечивается условие, при котором на выходах ФЧВ 7 и 8 напряжения U и Ув имеют противоположные знаки. Для этого в первом квадранте (фиг. 2) сигналы Uis и Uie ня выходах элементов ИСКЛЮЧАЮЩЕЕ ИЛИ 15 и 16 изменяются синфазно. Функции синуса и косинуса в диапазоне от 0 до 90° имеют положительные знаки, но поскольку синусная 3 и косинусная 4 обмотки СКВТ 1 включены в противофазе, напряжения У и Уз противоположны по знаку(У7 - отрицательно. Us- положительно). Во втором квадранте сигналы U is и Uie на выходах элементов ИСКЛЮЧАЮЩЕЕ ИЛИ 15 и 16 изменяются в противофазе, функции синуса и косинуса в диапазоне 90-180° имеют разные знаки, поэтому напряжения У и Ув имеют разные знаки (У положительно, Us - отрицательно), В третьем квадранте напряжение У имеет отрицательное значение, Ьа - положительное. 8 четвертом квадранте напряжение U положительное, а Уе - отрицатель.чое (см. фиг. 2 и 3).
В первом квадранте напряжения U и Us на выходах ФЧВ 7 и 8 одинаковы Ут sin a , Ue cos а, а разряды Уп 0 и Un-i 0. Считаем, что при положительном напряжении на
входе электропривод вращается в положительном направлении (вправо на фиг. 3), а при отрицательном - наоборот.
В те моменты времени, когда , на выход коммутатора 9 подается функция
cos а, В это же время на выходе блока 13 памяти присутствует функция sinN. ЦАП 10 перемножает сигналы, присутствующие на его цифровых и аналоговых входах, поэтому на выходе ЦАП 10 напряжение sinNcos a.
При появлении 1 на выходе компаратора 6. Коммутатор 9 подключает к своему выходу функцию si па, а на выходе блока 13 памяти появляется функция cosN. Следовательно, сигнал на выходе ЦАП 10 равен cosNsIn a . Так как сигнал на выходе компаратора 6 непрерывно изменяется с частотой напряжения возбуждения, то после усреднения в блоке 11 интегрирования напряженна на выхо е последнего
1
Un -у (cosas.,iN-sin acosN)
Ј sin (N-a).
Проанализируем полученное выраже- нче. Если N а, т.е. заданная точка находится левее (в соответствии с фиг. 3) фактической, Un 0, и привод 12 движется в отрицательном направлении (влево). Если N о:, т.е. заданная точка находится правее. заданной, Мц 0, и привод 12 движется в положительном направлении (вправо).
Привод 12 движется до тех пор, пока Уц
-J -z sin(N а) станет равным нулю. Это произойдет при N а. При поступлении команды перехода во второй квадрант на разряде кода N появляется 1 (). Это приводит к тому, что сигнал на выходе элемента 16 ИСКЛЮЧАЮЩЕЕ ИЛИ изменяется на 180° (если на первом входе элемента ИСКЛЮЧАЮЩЕЕ ИЛИ присутствует О, сигнал на его выходе равен сигналу на его втором входе, если же на первом входе присутствует 1, сигнал на выходе противоположен сигналу на втором входе). Это приводит к смене зн ака напряжения У. Оно становится положительным, как и напряжение Уа, и, следовательно, напряжение Уц завадомо положительно, и электропривод
12 движется в сторону второго квадранта. Когда угол а достигает второго квадранта, знак напряжения Ua изменяется за счет изменения знака функции cos а при переходе через угол 90°. Напряжения U и Us вновь имеют противоположные знаки.
Напряжение Un - j (sina sinN +
- cos acosN), однако, учитывая, что cos сг sln(a+90°), a sin a -cos (a+90°), Un
-- cosas n(«+ 900)-sinNcos(a+90°)
т|-sin (a-N-90°) I sin (N-a-90°).
Электропривод останавливается при уг- ле + 90° во втором квадранте. При поступлении команды перехода в третий квадрант 180° а 270° значения разрядов соответствуют , . При этом фаза сигнала Uie не изменяется, а фаза сигнала Uis изменяется на 180°. Это приводит к изменению полярности сигнала Us. Он становится положительным как и напряжение U, а значит, и напряжение Un оказывается положительным. Следовательно, электро- привод вращается в сторону третьего квадранта. При переходе через угол а 180° напряжение U изменяет знак (переход функции синуса через угол 180°). и напряжения U и Us вновь становятся разнополяр-
ными, а напряжение Un - (sina cosN-
cos a slnN)- -sin(N - a) - sin(N - a-180°).
Следовательно, электропривод останавли- вается при угле N «+180°. При поступлении команды перехода в четвертый квадрант 270 а 360 фаза сигнала Uie изменяется на 180°, и напряжение U становится положительным, как и напряжение Us. Следова- тельно, напряжение Un также оказывается положительным, и электропривод 12 вращается в положительном направлении в сторону четвертого квадранта. При достижении четвертого квадранта напряжения U и Us вновь становятся разнополярными, а напряжение
U ц - (sin a slnN+cosa cosN) cos(N-
-a) |sln(N-a+90°) -sln(N-a-270°).
Следовательно, электропривод останавливается при угле N a+270°. Если происходит команда на переход в квадрант с меньшим номером, например из третьего во второй, или из второго в первый, то в первый момент времени напряжения U и Us, а следовательно, и напряжение Un отрицательны, но только до тех пор. пока вал электропривода 12 не достигнет заданного квадранта.
Если приходит команда на переход из первого квадранта в третий или из второго в четвертый и наоборот, знак напряжения ипнеопределен. Если величина рассогласования меньше 180°, напряжение Un имеет одну полярность, а если величина рассогласования больше 180°, напряжение Un имеет противоположную полярность, т.е. электропривод вращается в требуемом положение по наиболее короткому пути.
Применение более простых элементов, уменьшение их общего числа, использование не требующих предварительного программирования микросхем памяти повышает надежность системы и удешевляет производство.
Формула изобретения
Цифроаналоговая следящая система, содержащая генератор опорной частоты, электропривод, датчик угла поворота, ротор которого механически соединен с валом электропривода, синусно-косинусный циф- роаналоговый преобразователь, младшие разряды цифрового входа которого являются младшими разрядами управляющего входа системы, коммутатор, два фазочувст- вительных выпрямителя, соединенных информационными входами с соответствующими выходами датчика угла поворота, компаратор, первый вход которого соединен с выходом генератора опорного напряжения и входом датчика угла поворота, а второй вход подключен к общей шине, три элемента ИСКЛЮЧАЮЩЕЕ ИЛИ, при этом первые входы первого и второго элементов ИСКЛЮЧАЮЩЕЕ ИЛИ являются старшими разрядами управляющего входа системы, вторые входы первого и второго элементов ИСКЛЮЧАЮЩЕЕ ИЛИ связаны с выходом компаратора, аналоговый вход синусно-ко- синусного цифроаналогового преобразователя соединен с выходом коммутатора, первый и второй информационные входы которого подсоединены к выходам соответствующих фазочувствительных выпрямителей, выход второго элемента ИСКЛЮЧАЮЩЕЕ ИЛИ соединен с управляющим входом второго фазочувствительного выпрямителя, первый вход первого элемента ИСКЛЮЧАЮЩЕЕ ИЛИ связан с первым входом третьего элемента ИСКЛЮЧАЮЩЕЕ ИЛИ, отличающаяся тем, что, с целью упрощения конструкции и повышения надежности, в нее введен блок интегрирования, выход которого соединен с входом электропривода, вторые входы первого и второго элементов ИСКЛЮЧАЮЩЕЕ ИЛИ
связаны со старшим разрядом цифрового входа синусно-косинусного цифроаналого- вого преобразователя, выходом подключенного к входу блока интегрирования, выход
тора, управляющий вход первого фаэочувст- вительного выпрямителя соединен с выходом третьего элемента ИСКЛЮЧАЮЩЕЕ ИЛИ, выход второго элемента ИСКЛ ЮЧАЮпервого элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 5 ЩЕЕ ИЛИ связан с вторым входом третьего соединен с управляющим входом коммута- элемента ИСКЛЮЧАЮЩЕЕ ИЛИ.
тора, управляющий вход первого фаэочувст- вительного выпрямителя соединен с выходом третьего элемента ИСКЛЮЧАЮЩЕЕ ИЛИ, выход второго элемента ИСКЛ ЮЧАЮ

| название | год | авторы | номер документа |
|---|---|---|---|
| Цифроаналоговая следящая система | 1989 |
|
SU1783473A1 |
| Цифроаналоговая следящая система | 1988 |
|
SU1580554A1 |
| Преобразователь угла поворота вала в код | 1985 |
|
SU1280698A1 |
| Преобразователь кода в угол поворота вала | 1988 |
|
SU1547070A2 |
| Преобразователь кода в угол поворота вала | 1986 |
|
SU1363472A1 |
| Способ преобразования угла поворота вала в код и устройство для его осуществления | 1989 |
|
SU1713103A1 |
| Устройство для преобразования кода в напряжения в формате СКВТ | 1988 |
|
SU1550546A1 |
| Преобразователь угла поворота вала в код | 1982 |
|
SU1105920A1 |
| Преобразователь угла поворота вала в код | 1985 |
|
SU1312737A1 |
| Фазовый дискриминатор сигналов СКВТ-датчика | 1988 |
|
SU1645982A1 |
Изобретение относится к автоматике и может быть использовано для управления объектами по сигналам от вычислительных устройств. Целью изобретения является упрощение конструкции и повышение надежности. Поставленная цель достигается тем, что в цифроаналоговую следящую систему, содержащую датчик угла поворота (синусно- косинусный вращающийся трансформатор) 1. генератор 5 опорной частоты, цифриана- логовый преобразователь (ЦАП) 10, фазо- чувствительные выпрямители (ФЧВ) 7 и 8, коммутатор 9, три элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 14-16, компаратор 6, введен блок 11 интегрировав я. Напряжения с выходов синусной 3 и косинусной 4 обмоток выпрямляются в ФЧВ 7 и 8 таким образом, что знаки их всегда противоположны Эти напряжения посоедством коммутатора 9 поочередно подаются наанапоговыйвход ЦАП 10, который перемножает их соответственно с функциями cosN и sinN и формирует на выходе сигнал рассогласования. Последний интегрируется в блоке 11 и подается на вход электропривода 12 для отработки ошибки. 3 ил. СП
ФЦ2.Ј.
пппппппппппппп
Vn1
L
Vn
4te
ТУП П П П П П П П П П П П
о№п
пппппп n n п п п п п
рП16П П П ППППППППППП
U7
8
о и
rYYW
Od
t
МЛЛ/ t
| Цифро-аналоговая следящая система | 1985 |
|
SU1282328A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Цифроаналоговая следящая система | 1988 |
|
SU1580554A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
