Изобретение относится к вибрационным машинам для транспортирования материалов.
Известим вибрационные конвейеры, содержащие грузонесущий орган, устаиовлениый иа упругие опоры и приводимый в колебания трехвальным дебалансиым вибратором с шестеренным синхронизатором.
(Эдиако такие конвейеры не позволяют производить реверсирование направления и регулировать скорость транспортирования материала.
С целью устранения указанных недостатков, в предлагаемом конвейере шестерни синхронизатора на крайних валах закреплены жестко, а шестерня среднего вала насажена свободно и снабжена сменным кулачком, взаимодействующим с дебалансом среднего вала.
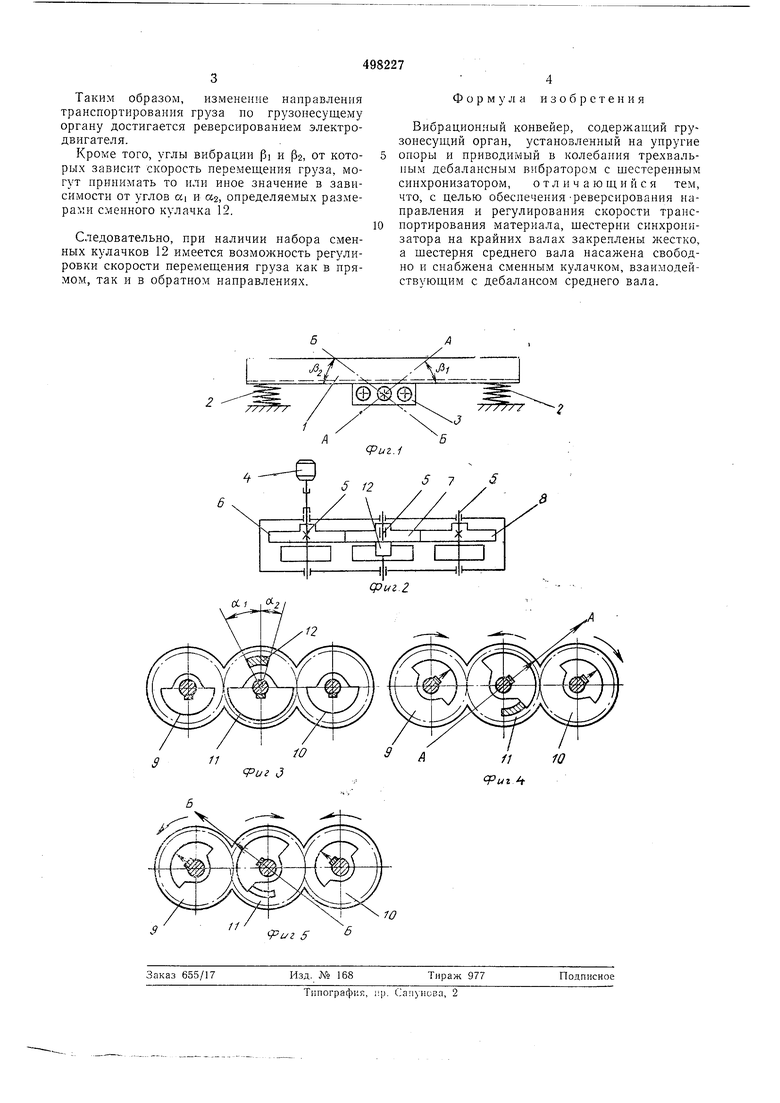
На фиг. 1 схематически изображен виброконвейер, общий вид; на фиг. 2 - дебалансный вибратор копвейера, поперечный разрез; на фиг. 3 - положение дебалансов и шестерен при отключенном электродвигателе; на фиг. 4 - промежуточное положение дебалансов при вращении вала электродвигателя -по часовой стрелке; на фиг. 5 - то же, против часовой стрелки.
Вибрационный конвейер состоит из грузонесущего органа 1 в виде желоба или трубы, упругой системы 2, в качестве которой могут быть использованы цилиндрические пружины
или резинометаллические пакеты, трехвальпого вибратора 3 и электродвигателя 4.
Три дебалансных вала 5 вибратора связаны между собой синхронизатором в виде трех шестерен 6, 7 и 8, причем щестерня 7 шариирно насажена на средний вал. На дебалансных валах закреплены дебалансы 9, 10 и 11, причем суммарный статический момент массы крайних дебалансов 9 и 10 равен статическому моменту массы среднего дебаланса 11. Шестерня 7 снабжена сменным кулачком 12, взаимодействующим с дебалансом 11.
При вращении вала электродвигателя 4 по часовой стрелке (см. фиг. 4) средний дебаланс 11 начнет вращаться только после того, как кулачок 12 повернется на угол, равный 90° - ai, и войдет в соприкосновение с кромкой дебаланса 11. При этом дебалансы 9, 10 и 11 создадут наиравленное по линии А-А возмущающее усилие, которое обеспечит колебания грузонесущего органа с углом вибрации
PI 45°---, в этом случае груз будет перемещаться по грузонесущему органу вправо.
При вращении вала электродвигателя против часовой стрелки (см. фиг. 5) возмущающее усилие вибратора будет направлено по линии Б-Б, угол вибрации грузонесущего органа Р2 45
-, и груз будет перемещаться
по грузонесущему органу влево.
Таким образом, изменение направления транспортирования груза по грузонесущему органу достигается реверсированием электродвигателя.
Кроме того, углы вибрации (5 и 2, от которых зависит скорость перемещения груза, могут принимать то или иное значение в зависимости от углов KI и «2, определяемых размерами сменного кулачка 12.
Следовательно, при наличии набора сменных кулачков 12 имеется возможность регулировки скорости перемегцения груза как в прямом, так и в обратном направлениях.
Формула изобретения
Вибрационный конвейер, содержащий грузоиесущий орган, установленный на упругие оноры и приводимый в колебания трехвальиым дебалансным вибратором с шестеренным синхронизатором, отличающийся тем, что, с целью обеспеченияреверсирования направления и регулирования скорости транспортирования материала, шестерни синхронизатора на крайних валах закреплены жестко, а шестерня среднего вала насажена свободно и снабжена сменным кулачком, взаимодействующим с дебалансом среднего вала.
| название | год | авторы | номер документа |
|---|---|---|---|
| аЦЬСиЮоНАЯ | 1973 |
|
SU373229A1 |
| Виброгрейфер | 1980 |
|
SU901449A1 |
| ВИБРАЦИОННЫЙ КОНВЕЙЕР | 1970 |
|
SU287572A1 |
| РЕГУЛИРУЕМЫЙ ДЕБАЛАНСНЫЙ ВИБРАТОР | 1990 |
|
RU2009857C1 |
| ИНЕРЦИОННЫЙ ДЁБАЛАНСНЫЙ ВИБРАТОР | 1969 |
|
SU255109A1 |
| ИНЕРЦИОННЫЙ ВИБРАТОР ДЛЯ ВЕРТИКАЛЬНЫХ ВИБРАЦИОННЫХ КОНВЕЙЕРОВ | 1970 |
|
SU261977A1 |
| ВЕРТИКАЛЬНЫЙ ВИБРАЦИОННЫЙ КОНВЕЙЕР | 1967 |
|
SU195365A1 |
| Вибратор бигармонических колебаний | 1976 |
|
SU653094A1 |
| йиьСОЮЗмА ЯicfJIMf! л ?VEI4'.?rr-W.'? 1Ы\ I «SM t bAsIf! iXvJsfLj^NrSflHOTr'iA | 1973 |
|
SU388973A1 |
| ВИБРАЦИОННЫЙ КОНВЕЙЕР | 1971 |
|
SU307950A1 |
