Известны вертикальные вибрационные конвейеры, состоящие из грузонесущего органа со спирально-винтовой рабочей новерхностью, уравновешивающей рамы, вибронривода и упругой системы.
Отличие предлагаемого вертикального вибрационного конвейера от известных заключается в том, что упругий эксцентриковый вибропривод и уравновешивающая рама расположены в среднем по высоте грузонесущего органа сечении, а упругая система, смонтированная по обе стороны уравновешивающей рамы, выполнена в виде расположенных под углом к горизонтальной плоскости .поддерживающих упругих связей, направляющих рессор и резиновых буферов. При этом грузонесущий орган и уравновешивающая рама снабжены амортизаторами.
Это обеспечивает увеличение высоты транспортирования грузов, повышение эффективности работы конвейера, а также снижение нагрузок на перекрытия и фундаменты зданий.
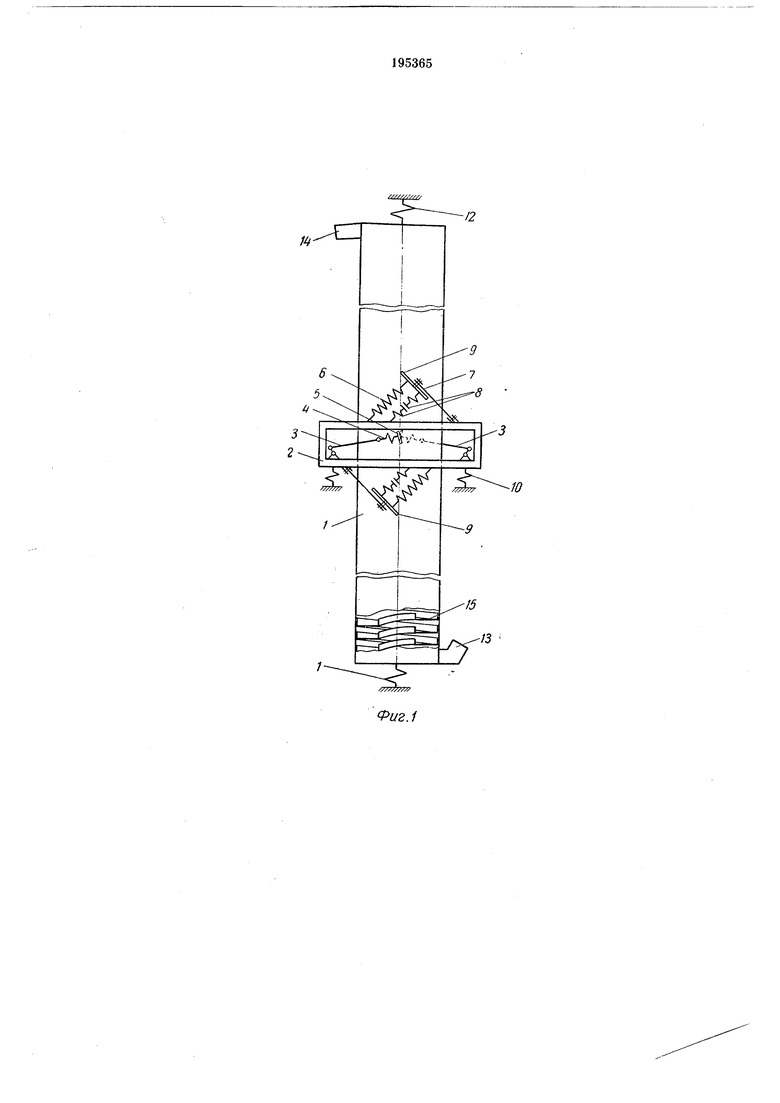
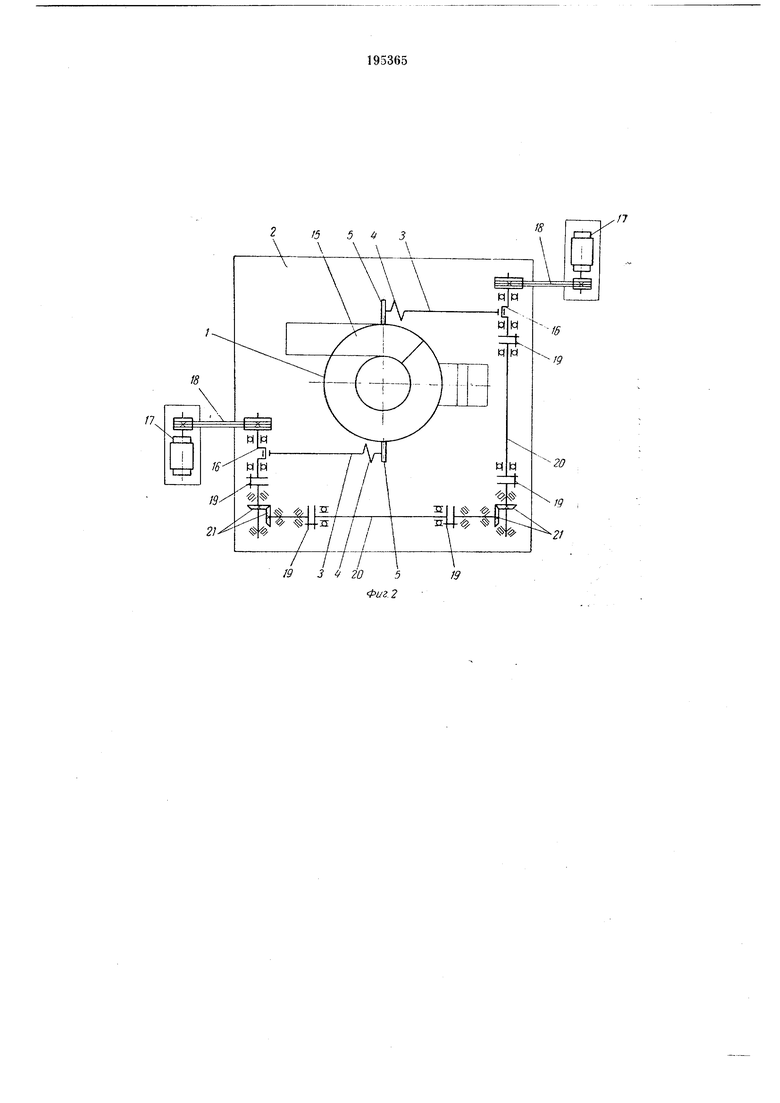
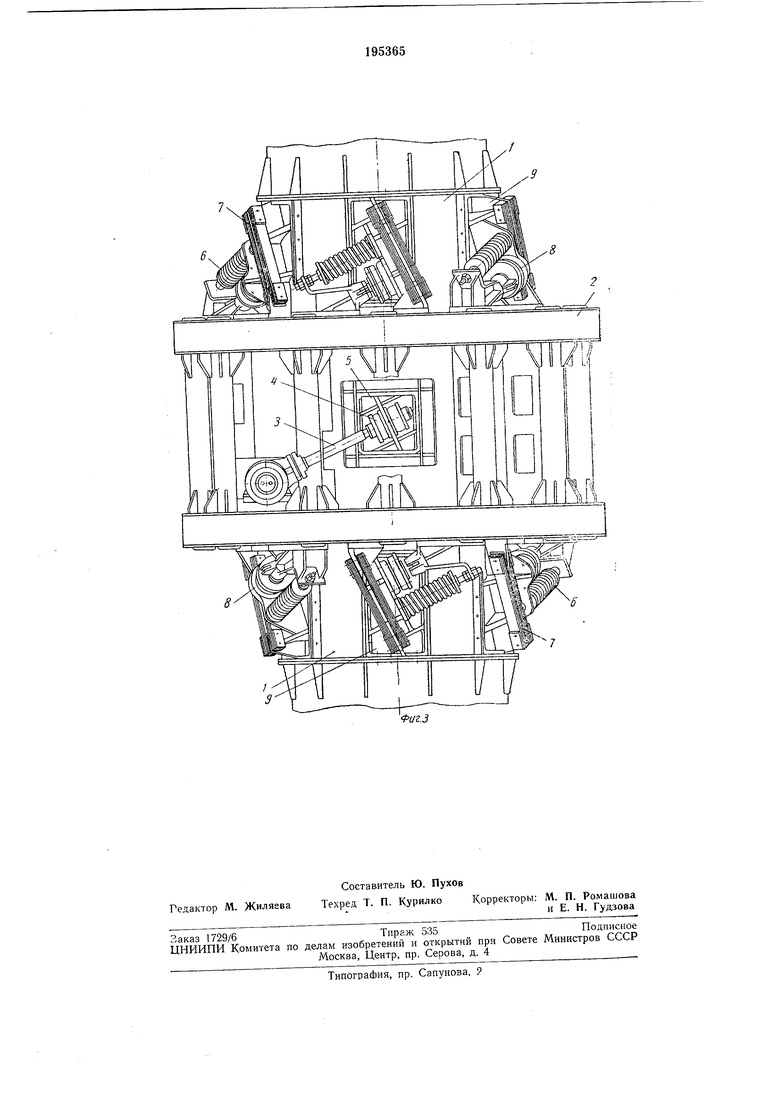
На фиг. 1 изображен предлагаемый конвейер, общий вид; на фиг. 2 - то же в плане; на фиг. 3 - его средняя часть с уравновешивающей рамой и виброприводом.
ханизмы, концы шатунов 3 .которых через упругие (резиновые или пружинные) связи 4 соединяются с кронштейнами 5, укрепленными на грузонесущем органе. Грузонесущий орган
и рама связаны между собой упругой системой, состоящей из поддерживающих упругих (резиновых или пружинных) связей 6, направляющих рессор 7 и резиновых буферов 9, установленных с зазором по обе стороны от рамы.
Одними концами упругие связи 6, 7 н 8 опираются на раму 2, а другими крепятся к кронштейнам 9 грузонесущего органа. Все перечисленные упругие связи и шатуны 3 эксцентриковых механизмов устанавливаются под определенными углами наклона к горизонту, зависящими от заданного угла направления колебаний грузонесущего органа.
Уравновешивающая рама устанавливается на фундаменте или перекрытии здания с помощью амортизирующих упругих связей 10. Для разгрузки поддерживающих 6 и направляющих 7 упругих связей грузонесуший орган также можно опирать (подвешивать) на амортизаторы // и 12.
Грузонесущий орган представляет собой цельную или секционированную трубчатую колонну, на нижнем конце которой крепится загрузочная течка J3, а на верхнем - разгрузочная J4 (в случае транспортирования сверху
лонны укреплена спирально-винтовая рабочая поверхность 15, на которой движется и обрабатывается насыпной материал.
Эксцентриковые валы 16 приводных механизмов получают вращение от автономных одинаковых электродвигателей 17 через клиноременные передачи 18. Электродвигатели устанавливаются на .неподвижном основании. Для поддержания синхронного и синфазного вращения обоих приводных эксцентриковых механизмов валы 16 соединяются между собой специальной передачей, состоящей из соединительных муфт 19, трансмиссионных валов 20 и конических шестерен 21, имеющих передаточное отношение, равное единице.
В зависимости от вида технологической обработки, которой должен подвергаться транспортируемый материал, грузонесущий орган может снабл аться устройсгвами для нагнетания и отвода воздуха, газов и жидкостей, нагрева или охлаждения обрабатываемого материала и т. д.
Онисываемый конвейер представляет собой двухмассную колебательную систему с упругими звеньями, которая в зависимости от частоты возмущающей силы привода может иметь три резонансных режима колебаний. В качестве рабочего режима колебаний можно принимать высший резонансный режим, характеризующийся встречным движением колеблющихся масс. В этом случае происходит практически полное уравновешивание сил инерции и сил упругости, действующих в системе. Динамические нагрузки, передаваемые конвейером на фундамент и перекрытия здания, незначительны. Это достигается благодаря возможности выбора жесткости амортизаторов 10, 11 н 12, исходя из условия удовлетворительной виброизоляции.
При пуске виброконвейера синхронное вращение от электродвигателей 17 передается эксцентриковым валам 16 в результате чего происходит деформация приводных упругих связей 4, поддерживающих и направляющих упругие связи 6, 7. Грузонесущий орган и рама начинают .колебаться с амплитудой, возрастающей по мере увеличения угловой скорости валов 16. Как только амплитуда колебаний грузонесущего органа относительно рамы превысит величину зазора между буферами 8, последние также начнут деформироваться и по достижении приводом рабочей резонансной частоты в системе установится стационарный рабочий режим движения масс.
В стационарном режиме каждая точка рабочей поверхности 15 соверщает близкие к гармоническим колебания ио винтовым траекториям, причем угол наклона к горизонтали траекторий точек, расположенных на одной и той же виитовой линии, зависит от угла наклона упругих связей 4, 6, 7, 8 и от радиуса окружности, образующей данную винтовую лииию.
вейерами, возоуждаемыми инерционными вибраторами, расположенными в одном из торцовых сечений грузонесущего органа.
Это обусловливается следующими факторами (подтверждено теоретическим анализом, расчетом и экспериментальными исследованиями) :
1)отсутствием, благодаря использованию эксцентрикового привода с упругими звеньями, значительных сосредоточенных масс, связанных с несущей трубчатой колонной;
2)приложением возмущающих приводных нагрузок :к среднему (по высоте) сечению трубчатой колонны, в результате чего сечения несущей конструкции подвержены действию вдвое меньших моментов (по сравнению со случаем торцового крепления вибратора);
3)снижением частоты вынужденных колебаний, что влечет за собой удаление от резоианса основного тона упругой трубчатой колонны грузонесущего органа.
Снижение частоты вынужденных колебаний системы в предлагаемой конструкции не приводит к уменьшению средней скорости перемен;ения транспортируемого материала, поскольку оно компенсируется одинаковым возрастанием амплитуды колебаний во всех сечениях грузонесущего органа, что в данной системе оказывается возможным благодаря использованию свойств резонансного режима и эксцентрикового привода с упругими звеньями.
Онисанный конвейер может применяться в различных отраслях промыщленности для
транспортирования сыпучих материалов в вертикальном направлении, а также в тех случаях, когда, наряду с транспортированием, необходима технологическая обработка этих материалов (сущка, охлаждение, обезвол ивание,
прокалка и т. д.).
Предмет изобретения
1. Вертикальный вибрационный конвейер, состоящий из грузонесущего органа со спирально-винтовой рабочей поверхностью, уравновешивающей рамы, вибропривода и упругой системы, отличающийся тем, что, с целью увеличения высоты транспортирования грузов i улучшения эффективности работы конвейера, упругий эксцентриковый вибропривод и уравновешивающая рама расположены в среднем по высоте грузонесущего органа сечении, а упругая система, смонтированная по обе стороны уравновешивающей рамы, выполнена в виде расположенных под углом к горизонтальной плоскости поддерживающих упругих связей, направляющих рессор и резиновых буферов.
2. Конвейер по п. 1, отличающийся тем, что, с целью снижения нагрузок на перекрытия и фундаменты зданий и разгрузки поддерживающих упругих связей и направляющих рессор, грузонесущий орган и уравновещивающая ра
| название | год | авторы | номер документа |
|---|---|---|---|
| йиьСОЮЗмА ЯicfJIMf! л ?VEI4'.?rr-W.'? 1Ы\ I «SM t bAsIf! iXvJsfLj^NrSflHOTr'iA | 1973 |
|
SU388973A1 |
| Вибрационный конвейер | 1981 |
|
SU967911A1 |
| Способ вибрационного транспортирования и устройство для его осуществления | 1977 |
|
SU659473A1 |
| Устройство для очистки конвейерных лент | 1976 |
|
SU672822A1 |
| Секция виброконвейера | 1981 |
|
SU994362A1 |
| ВЕРТИКАЛЬНЫЙ ВИБРАЦИОННЫЙ КОНВЕЙЕР | 1972 |
|
SU331994A1 |
| Вибрационный конвейер | 1979 |
|
SU882867A1 |
| ВИБРАЦИОННЫЙ МНОГОПРИВОДНОЙ КОНВЕЙЕР | 2012 |
|
RU2494949C1 |
| Секция вибрационного конвейера | 1980 |
|
SU889565A1 |
| Вибрационный конвейер | 1982 |
|
SU1064606A1 |