В пожарной технике известны механические лестницы, смонтированные на шасси автомобиля и использующие двигатель последнего для приведения в действие механизма развертывания и свертывания лестницы. Согласно изобретению предлагается приспособление к таким лестницам, автоматически обеспечивающее безопасную устойчивость лестницы в процессе ее развертывания и свертывания путем установки определенного угла для каждого в данный момент положения лестницы.
Известно, что всякая раздвижная механическая лестница подчиняется законам статической устойчивости и для каждого угла подъема имеет вполне определенные расчетом границы выдвижения, нарушение которых поведет к потере устойчивости и может повлечь за собой аварию.
Предложенное приспособление автоматически контролирует раздвижение лестницы и угол наклона ее при этом, а также управляет включением и выключением механизма развертывания и свертывания лестницы. Одновременно с этим приспособление автоматически исключает возможность совершения ошибки со стороны лица, пользующегося лестницей.
Отличительную особенность приспособления составляют: применение ролика, копирующего движение верхнего конца лестницы, который, при своем движении оказывая действие на кулачковую поверхность поворотного рычага и выступом на тыльной части последнего, управляет включением и выключением приводных механизмов.
Для управления движением означенного ролика служат вал, вращаемый механизмом выдвижения и складывания, и второй вал, расположенный к первому валу под прямым углом, поворачиваемый механизмом подъема и опускания лестницы, производящие перемещение несущей ролик коробки одновременно в горизонтальном и вертикальном направлениях, обусловливающих движение ролика по заданной кривой.
Механизмы выполнены автоматически осуществляющими изменение угла наклона лестницы при раздвижении и складывании ее.
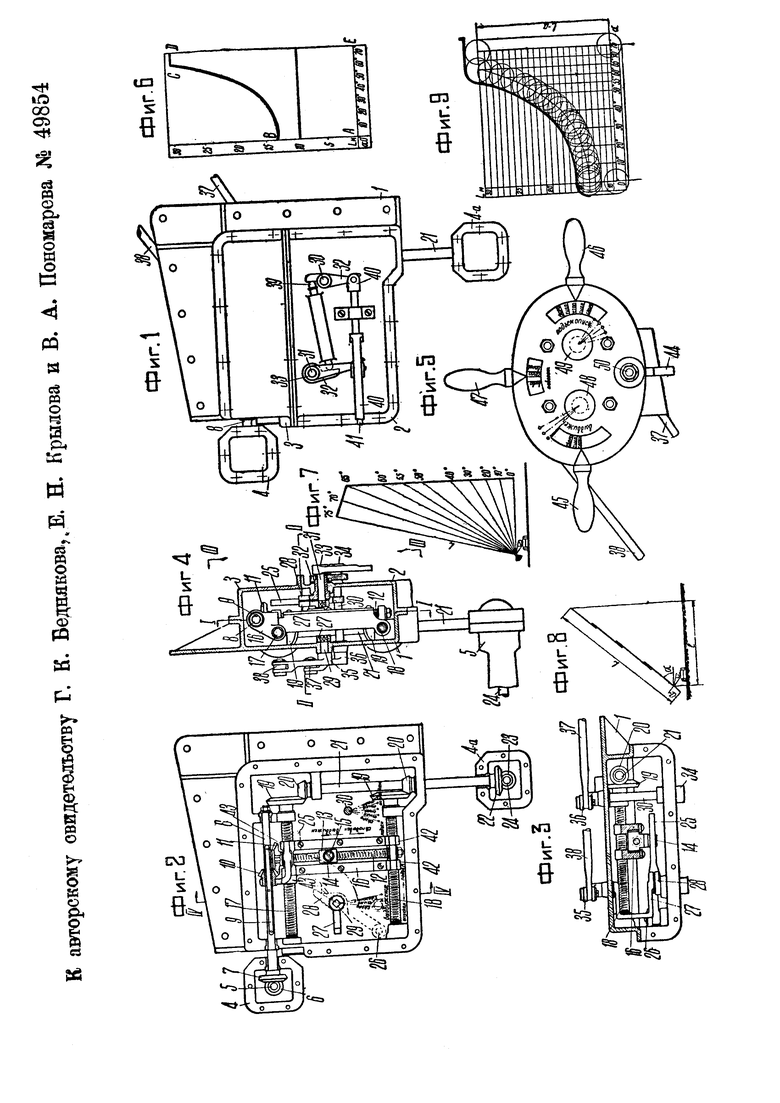
Фиг. 1 чертежа изображает приспособление в виде спереди; фиг. 2 изображает приспособление по разъему I-I на фиг. 4; фиг. 3 - то же в поперечном разрезе по II-II на фиг. 4; фиг. 4 - то же в продольном разрезе по IV-IV на фиг. 2; фиг. 5 - вид на циск управления; фиг. 6 - диаграмму кривой предельных положений лестницы; фиг. 7 - диаграмму, поясняющую работу приспособления; фиг. 8 - схему раздвижной лестницы; фиг. 9 - диаграмму построения кривой кулачковой поверхности детали приспособления.
Приспособление для управления развертыванием и свертыванием механической лестницы должно обеспечивать невыхождение конца лестницы из рабочего поля (фиг. 7), определяемого статическим расчетом на устойчивость.
Рабочее поле (фиг. 8) построено таким образом, что в пределах углов подъема лестницы от 0 до 65° длина ее от нижнего до верхнего конца:
где а - расстояние от нижнего конца лестницы по оси вращения подрамника,  - горизонтальная проекция раздвинутой части лестницы от оси вращения до верхнего конца, причем а=const;
- горизонтальная проекция раздвинутой части лестницы от оси вращения до верхнего конца, причем а=const;  =const; тогда при < α = 65°
=const; тогда при < α = 65°

при < α = 0°

В пределах от 65 до 75° лестница раздвинута на полную длину L. Этот закон выдвижения лестницы может быть представлен графически в виде некоторой кривой (фиг. 6), построенной в прямоугольных координатах. По оси абсцисс откладываются углы подъема лестница α, а по оси ординат - ее длина L.
При любых положениях лестницы для обеспечения безопасности ее в отношении устойчивости положение верхнего конца последнего колена не должно выходить за пределы площади ABCDE диаграммы (фиг. 6).
Приспособление действует таким образом, что если подвинутая лестница при уменьшении угла наклона α достигает опасного для устойчивости положения, то опускание остановится; обратно, если при данном угле наклона α длина выдвижения лестницы достигает предела для этого угла, то остановится механизм выдвижения.
При одновременном действии механизмов подъема (опускания) и выдвижения, по достижении лестницей опасного предела для устойчивости, выключаются оба движения.
Для абсолютной надежности приспособления и исключения возможности ошибки со стороны управляющего движениями лестницы оно действует непосредственно на рычаги управления (фиг. 5) и притом так, что после действия его невозможно включение движения в опасную сторону.
Всем этим условиям удовлетворяет изображенное на фиг. 1, 2, 3 и 4 выполнение приспособления.
Приспособление приводится в движение от вала 5 основного механизма выдвижения лестницы, вращающегося в подшипнике 4, либо от вала 24, основного механизма подъема и опускания лестницы, вращающегося в подшипнике 4а, или от обоих вместе. Вал 5 при выдвижении лестницы вращается влево (против часовой стрелки); при складывании лестницы - вправо (по часовой стрелке). Вал 24 при подъеме лестницы вращается влево (против часовой стрелки), при опускании лестницы - вправо (по часовой стрелке).
Механизм приспособления для удобства сборки и регулировки заключен в коробку из легкого сплава, состоящую из трех частей: задней части 1, передней нижней части 2 и передней верхней части 3; все части коробки соединяются болтами. Из коробки автомата выпущены валы 8 и 21 с насаженными на них коническими шестеренками 7 и 22. посредством которых механизм приспособления и получает соответствующие движения от валов 5 и 24 основного механизма лебедки.
На конце вала 5 насажена коническая шестерня 6, сцепленная с шестеренкой 7, насаженной на вал 8, вращающийся в подшипниках коробки приспособления. Этот вал имеет шпонку 9, по которой может передвигаться шестерня 10, передающая вращение шестерне 11 и винту 12, имеющему правую прямоугольную, ленточную нарезку. При вращении винта 12 по нему передвигается винтовая гайка 13 с роликом 14, вращающимся на оси 15. Гайка движется по направляющим ходовой каретки 16. Таким образом перемещение ролика 14 по винту 12 жестко связано с вращением вала 5, а следовательно и с выдвижением лестницы.
Ходовая каретка 16 имеет на концах гайки 42 и 43, перемещающиеся на винтах 17 и 18, имеющих правую прямоугольную ленточную нарезку, вращающихся в подшипниках задней части коробки приспособления 1 и соединенных через конические шестерни 19 и 20, валик 21 и конические шестеренки 22 и 23 с валом 24 привода подъемного винта лестницы.
Таким образом, движение ходовой каретки 16 по винтам 17 и 18 жестко связано с механизмом подъема (опускания) лестницы и, следовательно, с углом α наклона лестницы.
При любом движении лестницы центр ролика 14 копирует движение верхнего конца ее, выраженное в прямоугольных координатах α L (фиг. 6). Если конец лестницы достигает опасного предела по диаграмме (фиг. 6), то ролик 14 начинает нажимать на кулачковую поверхность поворотного рычага 25, построенную по закону L=ƒ (α) (фиг. 9), и поворачивает последний относительно центра вращения 26. При этом выступ на пыльной части рычага 25 нажимает на рычаги 27 и 28.
П-образный рычаг 27, будучи жестко соединенным с осями вращения 29 и 31, на концах которых консольно закреплены на оси 29 кривошип 35 с тягой 38, связанной с ручкой 45 управления механизмом выдвижения вращающийся на диске управления относительно центра 48 (фиг. 5), а на оси 31 поводок 33, соединенный шарнирно со штоком 41 золотника управления механизмом выдвижения лестницы. При повороте оси: 31 повернется и поводок 33, который, действуя на шток 41 золотника управления, выключит механизм выдвижения и выключение его в опасную сторону будет невозможно.
При нажатии на рычаг 28 последний поворачивается на оси 31 и приводит в движение насаженный на его втулку кулак 32; этот кулак нажимает на толкатель 39, который, действуя на поводок 34, поворачивает его относительно оси 30 и перемещает шток 40 золотника управления механизмом подъема и опускания, выключая механизм опускания. С противоположной стороны на оси 30 насажен кривошип 36 с тягой 37, соединенной с ручкой 46 управления механизмом подъема и опускания, вращающейся на диске управления относительно центра 49 (фиг. 5). При выключении механизма опускания кривошип 36 с тягой 37 приведет в положение "стоп" ручку 46 и дальнейшее включение механизма опускания в опасную сторону будет невозможно. Включить же механизм подъема будет возможно.
При включенном механизме выдвижения, когда лестница не достигает опасных для устойчивости пределов, механизм опускания включить всегда возможно, так как при повороте ручки 45 на "тихо" а затем на "скоро" кривошип 36 при помощи тяги 37 повернется относительно оси 30 и приведет в действие поводок 34, который нажмет на толкатель 39, а последний окажет давление на кулак 32, насаженный на втулке рычага 28, который, не встречая сопротивления со стороны кулака 25, повернется относительно оси 31.
Приспособление ограничивает при достижении опасных пределов, во-первых, длину выдвижения лестницы L, во-вторых, уменьшение угла подъема α.
Выключение механизма подъема при достижении максимального α=75° и минимального α=0° достигается воздействием треугольного подрамника первого колена лестницы непосредственно на рычаги управления. Для этой цели на оси 48 и 49 диска управления устанавливаются специальные кривошипные рычаги.
Ограничения складывания лестницы не требуется, так как складывание происходит под влиянием собственного веса лестничных колен при установке ручки 45 на диске управления в положение "сложить", причем чрезмерно быстрому обратному ходу препятствует масляный тормоз, отрегулированный на определенную безопасную скорость.
Управление подъемом, опусканием и выдвижением лестницы производится при помощи ручек 46 и 45 диска управления (фиг. 5), при установке которых в нужное положение поворачиваются оси 49 и 48 с закреплением на них кривошипами, действующими на тяги 37 и 38, соединенные с механизмом приспособления и управляющими золотниками подъема, опускания и выдвижения лестницы. При достижении лестницей опасных для устойчивости пределов приспособление выключит соответствующие золотники управления механизмами лестницы и переведет ручки 46 и 45 в положение "стоп". Управление поворотом рычага 25 не контролируется и производится путем установки ручки 47 в желаемое положение относительно центра вращения 50. Связанная с ручкой 47 тяга 44 действует непосредственно на шток золотника управления поворотом и включает или выключает поворот лестницы в том или другом направлении.
| название | год | авторы | номер документа |
|---|---|---|---|
| АНТЕННО-МАЧТОВОЕ УСТРОЙСТВО ДЛЯ РАДИОРЕЛЕЙНОЙ СТАНЦИИ | 2012 |
|
RU2488203C1 |
| Манипулятор | 1972 |
|
SU446411A2 |
| Приспособление к автомобилю для посадки и снятия механической лестницы | 1935 |
|
SU46146A1 |
| ИНВАЛИДНАЯ ШАГАЮЩАЯ КРЕСЛО-КОЛЯСКА | 2010 |
|
RU2434622C1 |
| ИНВАЛИДНАЯ КОЛЯСКА ДЛЯ ПЕРЕДВИЖЕНИЯ ПО ЛЕСТНИЦАМ | 1996 |
|
RU2102957C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2009 |
|
RU2410071C1 |
| Машина для складывания мотков вышивальной бумаги и оклейки их этикетками | 1937 |
|
SU52664A1 |
| УСТРОЙСТВО ДЛЯ ПРОПУСКА ШВА У СТРИГАЛЬНЫХ МАШИН | 1928 |
|
SU22846A1 |
| ПРИСПОСОБЛЕНИЕ ДЛЯ АВТОМАТИЧЕСКОГО ПРИВОДА ЗАТЯЖНЫХ МАШИН | 1927 |
|
SU20488A1 |
| МОБИЛЬНАЯ ВОЛНОВОДНАЯ АНТЕННАЯ РЕШЕТКА | 1983 |
|
SU1840020A1 |
1. Приспособление к механической пожарной лестнице для автоматического управления механизмами развертывания и свертывания лестницы, отличающееся тем, что, в целях сохранения при развертывании лестницы безопасного угла наклона, применен ролик 14, копирующий движение верхнего конца лестницы и предназначенный при своем движении оказывать действие на кулачковую поверхность поворотного рычага 25 и воздействовать выступом на тыльной части означенного рычага на рычаги 27 и 28, управляющие включением и выключением приводных механизмов.
2. Форма выполнения приспособления по п. 1, отличающаяся тем, что для управления движением ролика 14 применены вал 8, вращаемый механизмом выдвижения и складывания, и вал 21, вращаемый механизмом подъема и опускания лестницы, расположенные по отношению друг к другу под прямым углом, причем вал 8 снабжен скользящей по нему конической шестерней 10, предназначенной для вращения винта 12, служащего для перемещения в одном направлении ролика 14 при посредстве гайки 13, а вал 21 служит для перемещения этого ролика в направлении, перпендикулярном к первому при посредстве винтов 17 и 18 и каретки 16, в кулисе которой имеет движение гайка 13, несущая, как указывалось, ролик 14.
3. Форма выполнения приспособления по пп. 1 и 2, отличающаяся тем, что, с целью производства включения и выключения механизмов, изменяющих угол наклона лестницы, служащий для этого П-образный рычаг 27 укреплен жестка на осях 29 и 31, первая из которых снабжена кривошипом 35, предназначенным для автоматической установки в соответствующее положение на диске управления (фиг. 5) при посредстве тяги 38 указателя ручки 45 механизма выдвижения, а вторая ось 31 несет поводок 33, служащий для приведения в действие включающего и выключающего этот механизм штока 41.
4. Форма выполнения по пп. 1-3, отличающаяся тем, что с целью производства включения и выключения механизма подъема и опускания лестницы, осуществляющий его рычаг 28 служит для приведения в действие кулака 32, предназначенного воздействовать при посредстве толкателя 39 на шток 40, включающий и выключающий механизм подъема и опускания лестницы.
