1
Изобретение относится к устройствам с ручным управлением, предназначенным для механизации труда рабочего, связанного с загрузкой и разгрузкой технологического оборудования, и может быть исиользовано в различных отраслях промышленности, преимущественно в электровакуумной и стекольной.
Известен манипулятор по авт. св. N° 375174, снабженный захватным устройством, которое связано с механизмом вертикального перемещения, установленным на многошарнирной стреле. Механизм вертикального перемещения представляет собой гидравлический сервопривод, выполненный в виде приводящего посредством двух реечных пар захватного органа гидроцилиндра и следящего золотника. Последний через зубчатую пару и рычажную систему управляется оператором. При этом обратная связь по перемещению осуществляется цилиндрическим кулаком.
Такая конструкция позволяет рабочему без заметного физического напряжения регулировать величину и направление потока жидкости, поступающей в гидроцилиндр, благодаря чему захват с достаточной точностью воспроизводит (копирует) движение руки оператора. Однако рука рабочего не ощущает усилия, действующего на захват.
Кроме того, система управления необратима. Это значит, что перемещать захват можно.
2
воздействуя на единственный орган управления - рычаг.
Для достижения больщей точности установки и исключения повреждений чувствительных поверхностей изделий (например, шлифованных, хрупких) удобнее в момент загрузки управлять движением захвата не рукояткой, а непосредственно воздействуя на изделие или захват.
В предлагаемом манипуляторе для повышения чувствительности исполнительный орган захватного механизма - вакуумный присос - установлен на качающемся на шарнирах относительно кронштейнов, закрепленных на корпусе захватного механизма, двуплечем рычаге, который посредством шарнирно соединенного с ним шатуна связан с управляющим рычагом, представляющим собой ведущее звено кинематической цепи обратной связи системы управления, гидравлическим приводом механизма вертикального перемещения.
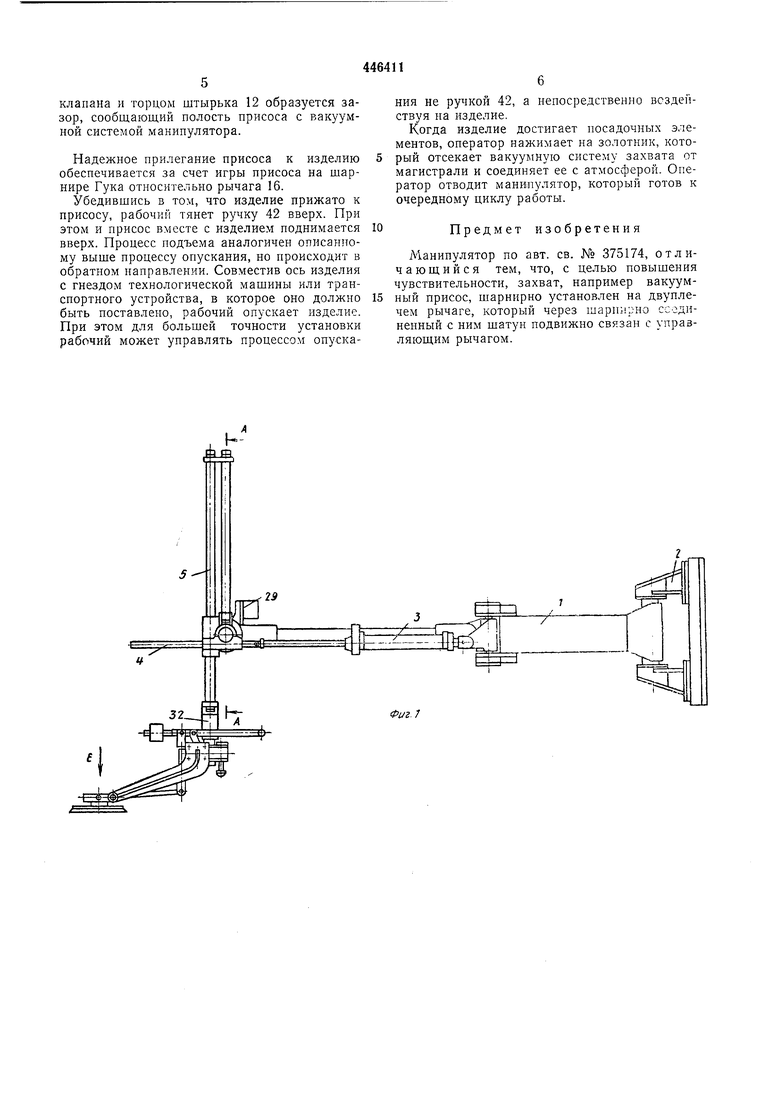
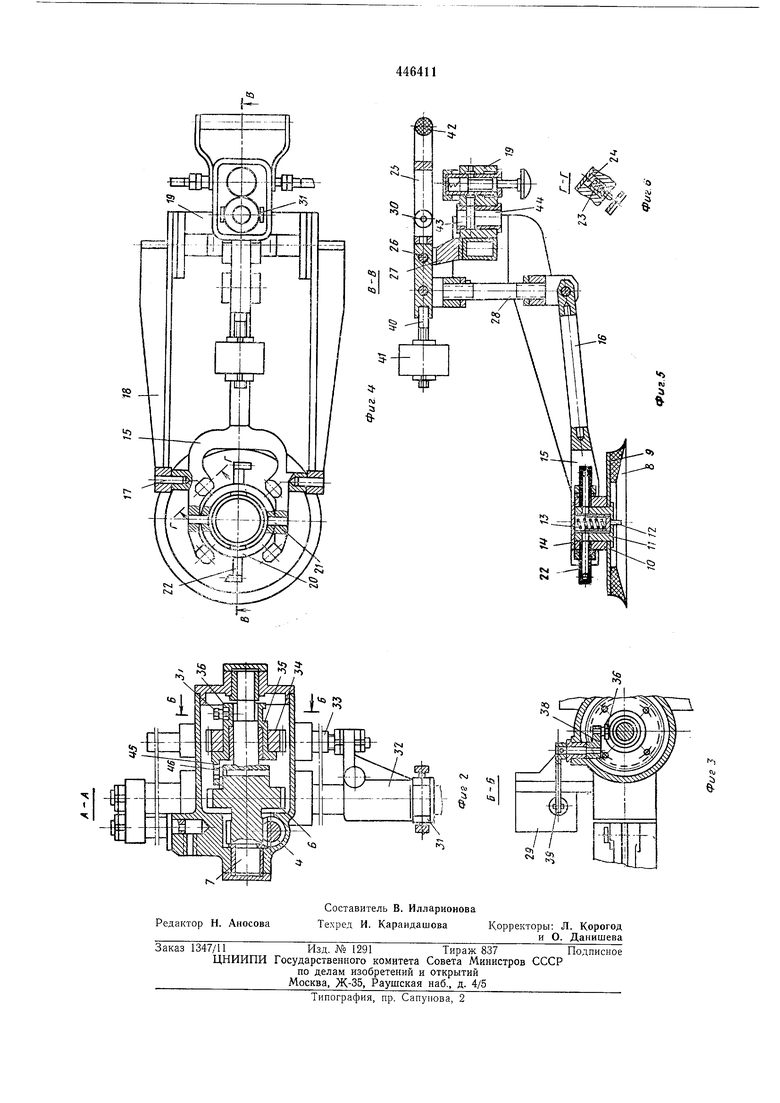
На фиг. 1 изображен манипулятор, общий вид; на фиг. 2 - разрез по А - А на фиг. 1; на фиг. 3 - разрез по Б - Б на фиг. 2; на фиг. 4 - вид по стрелке Е на фиг. 1; на фиг. 5 - разрез по В - В на фиг. 4; на фиг. 6 - разрез но Г - Г на фиг. 4.
Манипулятор выполнен в виде двухзвенной стрелы 1, которая может свободно проворачиваться на подшипниках 2, закрепленных на стене или колонне (па чертеже не показана).
На стреле смонтирован подъемный механизм, состоящий пз гидроцилиндра 3, который посредством двух зубчатых пар, образованных рейками 4 и 5 и зубчатым блоком 6, изготовленном заодно с валом 7, 1 риводнт в движение захватный механизм.
В качестве иснолнительного органа в захватном механизме применен вакуумны.й нрисое, представляющий собой уплотнитель 8, прнкрепленный к шайбе 9. Последняя неподвижно посажена на вакуумный клапан, выполненный в виде свободно вращающегося во втулке 10 корпуса 11. По внутреннему диаметру шлицевого отверстия скользит 1нтырек 12, нрижимаемый к седлу корпуса пружиной 13, которая упирается верхним торцом в шайбу 14, жестко связанную с корпусом 11. Шайбы 9 и 14, охватывающие втулку 10, удерживают вакуумный присос от осевого перемещения. К вилке 15 двуплечего рычага 16, качаюи1.егося на пальцах 17 относительно кронштейнов 18, ненодвилсно закрепленных на корпусе захвата 19, подвешивают присос с помощью шарнира Гука, выполненного в виде кольца 20, в котором закреплены пальцы 21 и 22. Пальцы 21 вставлены в отверстия вилки 15, а полые нальцы 22 в отверстия втулки 10. Шарнир Гука обеснечивает присосу относительно рычага 16 две степени свободы -два вращения вокруг двух пересекающихся взаимоперпендикулярных осей. Подвиж ость присоса относительно рычага необходима для компенсации погрешности установки транснортируемого изделия. В свободном состоянии присос четырьмя стуненчатУми тнтырьками 23, нпижимаемымн пружинами 24, удерживается в строго определенном положении.
Управляющий двуплечий рычаг 25, качающийся на пальце 26 относительно крониггейна 27, закреп.ленного на корпусе захвата 19. связан с рычагом 16 и шатуном 28. Кроме того, движение рычага 25 с помон№Ю кине.1атичсской цепи обратной связи передается на еледящий золоткик 29, который управляет величиной и направлением потока жидкости, поступающей в гидроцилиндр 3 полъем юго мехагнзма. Цепь обрат-ой связи образована сидящими на запрессованных в рычаг 25 пальцах 30 роликами 31, взаимодейств-ющнми с муфтой 32, скользящей по наружной цилиндрической новерхности рейки 5. Муфта 32 через рейку 33, зубчатое колесо 34, заклиненное на цилиндрическом кулаке 35, в паз которого входит ролик 36, сидящий на пальце 37 рычага 38, и шатун 39 связаны с плунжером следящего золотника 29.
Таким образом, управляющий рычаг 25 кинематически связан как со следящим золот)Г11ком, так и с присосом. Для уравновешивания веса звеньев и частично веса изделия, подвешиваемого к присосу на шпильке 40 рычага 25,.нредусмотрен регулируемый нротивовес 41. Рычаг 25 в положениях, отличных от крайних,
может находиться в состояни раиновесия только в том случае, если к ручке 42 приложена некоторая сила. Эту силу развивает рука рабочего. Зависит оиа от передаточного отношения рычажного механизма, образованного рычагом 25, шатуном 28 и рычагом 16, на котором подвешен присос. Это иередаточное отношение выбирается из расчета, чтобы сила, которую необходимо приложить к ручке 42 для удержания ее в равновесии, была достаточио малой, ио нозволяла ощущать силу веса изделия, находящегося на присосе. Захватный механизм нодвешивается к рейке 5 подъемного механизма, относительно которой он может свободно вращаться при номощи запрессованных в корпус втулок 43 и 44.
Манипулятор работает следующим образом.
Все движения оператор выполняет, воздействуя на ручку 42. Движение в горизонтальном направлении выполняется за счет мускульной энергии оиератора. Однако сила перемещения незначительная, поскольку звенья стрелы легко поворачиваются на нодшипниках. Сила же, необходимая для вертикального неремещения, создается гидроцилиндром. Для захвата изделия оператор новорачивает стрелу манипулятора до совмещения оси присоса с осью изделия. Оиератор тянет вниз ручку 42, которая увлекает за собой муфту 32 с рейкой 33. При этом поворачивается зубчатое колесо 34 и кулак 35. Одновременно с новоротом кулак перемещается вдоль вала 7, поскольку ролик 45, взаимодействующий с кулаком, неподвижен. Рычаг 38 поворачивается и через шатун 39 тянет плунжер следящего золотника 29, который подает жидкость в левую полость гидроцилиндра 3. При этом шток, двигаясь внраво, посредством рейки 4 и зубчатого блока 6 опускает рейку 5 и сидящий на ней захватный механизм. Одновременно ролик 45, вращающийся на занрессованном в вал 7 пальце 46, поворачивается, стремясь возвратить кулак 35 в исходное положение. Чтобы ноддерживать движение, рабочий должен все время тянуть ручку 42 вниз. Скорость движения присоса соответствует скорости движения руки рабочего. Когда присос садится на изделие, движение рукоятки 42 прекращается. Вполне понятно, что нри этом следящий золотиик займет нейтральное ноложение, прервав нодачу жидкости в гидроцилиндр, а шток остановится. Момент встречи присоса с изделием по возросшему усилию сопротивления рука мгновенно почувствует и прекратит свое воздействие на ручку 42. Тем самым с изделия, подлежащего съему, будет снята нагрузка, значит опасность его разрушения или .повреждения, равно как и самого манипулятора, устраняется.
При взаимодействии присоса с изделием сообщение вакуумной нолости, образованной поверхностью захвата и нрисосом, с вакуумной магистралью осуществляется автоматически. Штырек 12 поднимается изделием вверх, сжимая нружину 13. Между седлом корпуса 11
клапана и торцом штырька 12 образуется зазор, сообщающий полость присоса с вакуумной системой манипулятора.
Надежное прилегание присоса к изделию обеспечивается за счет игры присоса на щарнире Гуна относительно рычага 16.
Убедивщись в том, что изделие прижато к присосу, рабочий тянет ручку 42 вверх. При этом и присос вместе с изделием поднимается вверх. Процесс подъема аналогичен описанному выще процессу опускания, но происходит в обратном направлении. Совместив ось изделия с гнездом технологической мащины или транспортного устройства, в которое оно должно быть поставлено, рабочий опускает изделие. При этом для больщей точности установки рабочий может управлять процессом опускания не ручкой 42, а непосредственно всздействуя на изделие.
Когда изделие достигает посадочных элементов, оператор нажимает на золотник, который отсекает вакуумную систему захвата от магистрали и соединяет ее с атмосферой. Оператор отводит манипулятор, который готов к очередному циклу работы.
Предмет изобретения
Манипулятор по авт. св. № 375174, отличающийся тем, что, с целью повышения чувствительности, захват, например вакуумный присос, шарнирно установлен на двуплечем рычаге, который через шарнирно ссединенный с ним шатун подвижно связан с управляющим рычагом.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1972 |
|
SU441141A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ | 1994 |
|
RU2113396C1 |
| Устройство для шаговой подачи заготовок в зону обработки | 1984 |
|
SU1346306A1 |
| Манипулятор | 1975 |
|
SU529072A1 |
| КРАН-МАНИПУЛЯТОР | 2002 |
|
RU2240972C2 |
| Система управления манипулятором | 1980 |
|
SU884997A1 |
| Устройство управления машиной манипуляторного типа | 1978 |
|
SU701792A1 |
| Манипулятор | 1975 |
|
SU547195A1 |
| Захват манипулятора | 1979 |
|
SU844262A1 |
| ЗАТЯЖНАЯ МАШИНА | 1929 |
|
SU27311A1 |
Фиг. /
