3
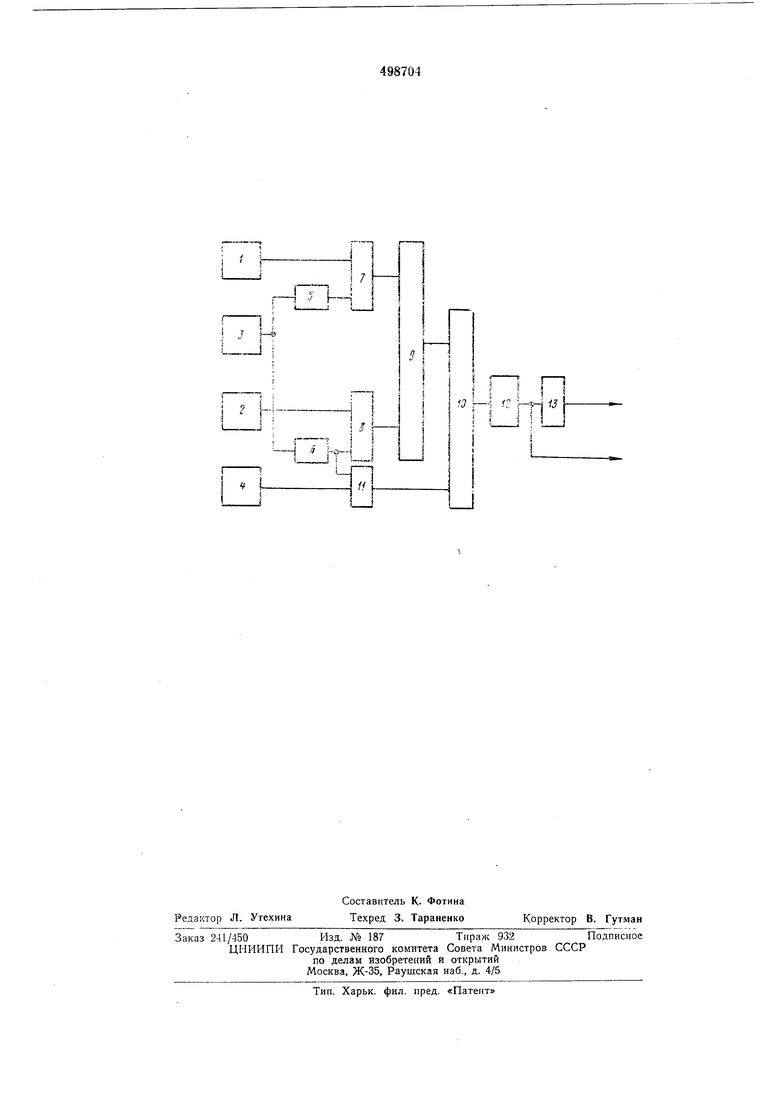
водится суммирование первой величины, помноженной на коэффициент, равный эквивалентному внешнему реактивному сопротивлению энергосистемы, примыкаюнлей к шинам станции, со второй величиной. Выпол,непие операции дифференцирования на блоках 12 и 13 и инвертирования трудностей не представляет и .ожет осуществляться, например, с цоМОИ1ЫО элемеитов унифицироваицого автоматического регулятора сильного действия.
Предлагаемый способ основан па принципе обеспечения паибольшей скорости убывания избыточной эпергии У,; относительного движения генератора сложной системы иад заданным положением равиовесия. Выражение для завнсимой от приращепия э. д. с. г-й синхронной машины составляющей полной производной избыточной энергии (при пренебрежении активиыми составляющими во вза:,(ых нроводимостях) можно записать в виде
- Д/:,Т ;У//81П§/,-5,; Д,П, (1)
где А/:; - приращение э. д. с. /-Й сиихрониой
мащины;
EJ - э. д. с. /-Й синхронной машины; У 1 - взаимная проводимость между г-м
и /-М узлами системы; bij - взаимный угол между э. д. с. /-и
и /-Й синхронных машин; 5,-; - взаимное скольжение между роторами t-й и /-Й синхронных машин; П - стабилизирующий параметр. Для обеспечения наибольшей скорости убывания избыточной энергии V.; регулирование должно осуществляться по закону, представляющему собой линейную комбн11аци о стабилнзирующего параметра П и производной это1о параметра.
Стабилизирующий параметр является сложной нелинейной функцией взан.мных углоз и скольжений, непосредственное измерение которых на месте установки АРБ невозможно.
Определенным образом преобразовав выражение для продольной составляющей тока статора регулируеглой мащи.ны, получим:
id: -Zf/r.-cosSii -г EjYijaosSij- (2)
4
Лосле 1 реобразований и дифференцироваиия, выполнен кого в предположении постоянства э. д. с. ерегулируемых машнн, получим:
--„.о - У /:;K,.,.sinS,;S,v П.
(3) ri
Таким образом, стабилизирующий параметр, все составляющие которого отражают сложное взаимное движение агрегатов в системе, может быть сформирован с помощью только местной информации.
При обесиечеиии высокого качества демпфироваиня колебаний область допустимой настройки коэффициентов по каналам стабилнзи)ующих нараметров оказывается общей для
очень широкого диапазона исходных режимов работы энергосистемы. Сказанное справедливо даже для таких резко различных условий работы, как использование регулируемой машины в режимах генератора и двигателя. Это
создает возможиость эффективного применения предложенного спесоба также для обратимых сиихро,ниых машин электровакуумирующих станций.
Формула изобретения
Способ формирования стабилизирующего параметра для регулирования возбуждения
синхронной электрической машины, работающей в сложной энергосистеме и оборудованной быстродействующим возбудителем и регулятором возбуждения сильного действия с каналами по отклонению и первой производной
напряжения стато а, стабилизирующего параметра и его первой производной, отличающийся, тем, что, с целью расширения общей для различных режимов области устойчивости и повышения качества процессов регулирования,
измеряют поперечную составляющую напрян еиия статора и продольную составляющую тока статора, суммируют первую измеренную величину со второй, помноженной на коэффициент, равный эквивалентному внешнему реактивному сопротивлению энергосистемы, примыкающей к шинам станции, и производную от полученной суммы, взятую с обратным знаком, используют в качестве стабилизирующего параметра.