Изобретение относится к электротехнике и может быть использовано для автоматического регулирования возбуждения синхронных электрических машин.
Целью изобретения является расширение области устойчивости для различных режимов.
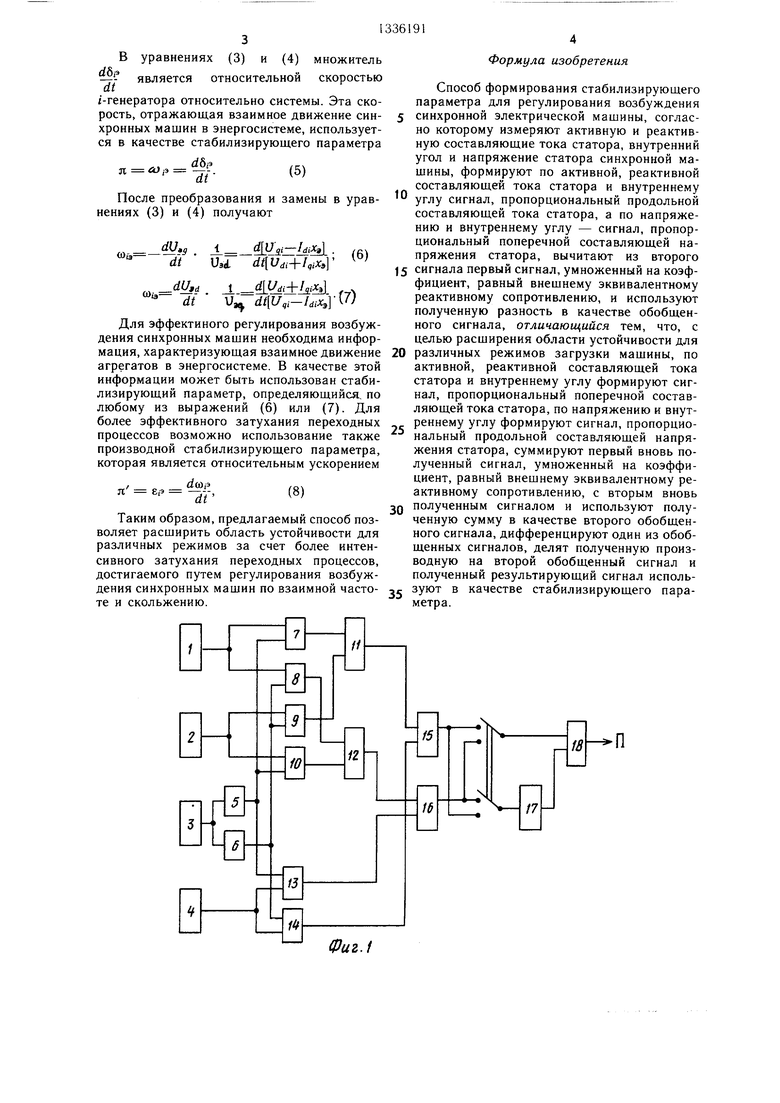
На фиг. 1 показан вариант блок-схемы устройства, реализующего предложенный способ; на фиг. 2 - векторная диаграмма синхронной машины.
Устройство (фиг. 1) содержит датчик 1 измерения активной составляюш,ей тока статора, датчик 2 измерения реактивной со- ставляюш,ей тока статора, датчик 3 измерения внутреннего угла синхронной машины, датчик 4 измерения напряжения статора, а также блок 5 формирования синуса, блок 6 формирования косинуса внутреннего угла синхронной машины, блоки 7, 8, 9, 10, 13 и 14 перемножения, блоки 11, 12, 15 и 16 суммирования, блок 17 дифференцирования и блок 18 деления.
С выхода датчика 1 сигнал поступает на входы блоков 7 и 8, с выхода датчика 2 - на входы блоков 9 и 10, с выхода датчика 3 - на входы блоков 5 и 6, с выхода датчика 4 - на входы блоков 13 и 14. С выхода блока 5 сигнал поступает на вход блоков 7, 10 и 13, с выхода блока 6 - на вход блоков 8, 9 и 14. На вход блока 11 поступают сигналы с выхода блоков 7 и 9, на вход блока 12 - сигналы с выхода блоков 8 и 10, на вход блока 15 - сигналы с выхода блоков 11 и 14, на вход блока 16 - сигналы с выходов блоков 12 и 13, вход блока 18 соединен с выходом блока 17.
Между блоками 15-18 возможны два варианта соединений: по первому варианту выход блока 15 соединен с входом блока 18, а выход блока 16 - с входом блока 17, по второму варианту выход блока 15 соединен с входом блока 17, а выход блока 16 - с входом блока 18. В.обоих случаях выход блока 17 соединен с входом блока 18.
Способ формирования стабилизируюшего параметра с помощью устройства заключается в следующем.
С помощью датчика 1 измеряют активную составляющую тока статора, датчика 2 - реактивную составляющую тока статора, датчика 3 - внутренний угол, датчика 4 - напряжение статора синхронной машины.
Выделяют продольную составляющую тока di для чего на блоке 5 формируют синус, а на блоке 6 - косинус внутреннего угла, и после перемножения составляющих тока статора с соответствующими функциями внутреннего угла на блоках 7 и 9 на блоке 11 производят суммирование этих сигналов. Для выделения поперечной составляющей напряжения U,( статора на блоке 14 производят перемножение сигнала, пропорционального напряжению статора, с сигналом, пропорциональным косинусу внутреннего угла. Для формирования первого обобщенного сигнала на блоке 15 производят операцию вычитания продольной
составляющей тока статора, умноженной на коэффициент, равный внешнему эквивалентному реактивному сопротивлению энергосистемы, из величины поперечной составляющей напряжение статора. Для выделения продольной составляющей напряжения статора
0 Udi на блоке 13 производят перемножение сигнала, пропорционального напряжению статора, на величину сигнала, пропорционального синусу внутреннего угла. Для выделения поперечной составляющей тока стас тора I,, на блоке 12 производят суммирование сигналов, пропорциональных произведению составляющих тока статора, с соответствующими функциями внутреннего угла на блоках 8 и 10.
Для формироания второго обобщенного
0 сигнала на блоке 16 производят суммирование продольной составляющей напряжения статора и поперечной составляющей тока статора, умноженной на тот же коэффициент.
r Далее дифференцируют один из обобщенных сигналов на блоке 17.
Для получения результирующего сигнала производят деление одного продифференцированного из обобщенных сигналов на другой обобщенный сигнал на блоке 18, и по0 лученный таким образом результирующий сигнал, взятый с соответствующим знаком, является стабилизирующим параметром. Результирующий сигнал получается либо делением первого продифференцированного обобщенного сигнала на другой сигнал, либо
5 делением второго продифиренцированного обощенного сигнала на первый обобщенный сигнал. В первом случае для получения стабилизирующего параметра результирующий сигнал меняет знак, во втором случае не меняет.
0 Математические выражения, необходимые для реализации способа регулирования, могут быть получены из векторной диаграммы синхронной машины (фиг. 2)
иэ,иэСО5б;э /,,--IdiX
J3j-V35m8i3 Udi-{-IqiX3,
(1)
(2)
где и э - значение напряжения за эквивалентным реактивным сопротивлением - угол между поперечной осью регулируемой станции и вектором напряжения системы.
Берут производную от выражений (1) и (2)
55 -U3sin6.. f;
(3)
U,cos6i. - .
dbf. di
(4)
В уравнениях (3) и (4) множитель
С
- является относительной скоростью dt
i-генератора относительно системы. Эта скорость, отражающая взаимное движение синхронных машин в энергосистеме, используется в качестве стабилизирующего параметра
- -ff(5)
После преобразования и замены в уравнениях (3) н (4) получают
«5 dt
± Ф 1 Г:/ ША ,;x,,
(i)t
di/,d J. i±b.i dt U dt Ugi-iaiX3
(7)
Для эффектиного регулирования возбуждения синхронных мащин необходима информация, характеризующая взаимное движение агрегатов в энергосистеме. В качестве этой информации может быть использован стабилизирующий параметр, определяющийся, по любому из выражений (6) или (7). Для более эффективного затухания переходных процессов возможно использование также производной стабилизирующего параметра, которая является относительным ускорением
dco,3
- - dr
(8)
Таким образом, предлагаемый способ позволяет расширить область устойчивости для различных режимов за счет более интенсивного затухания переходных процессов, достигаемого путем регулирования возбуждения синхронных машин по взаимной частоте и скольжению.
9 iO
; f«Фиг.
10
Формула изобретения
Способ формирования стабилизирующего параметра для регулирования возбуждения синхронной электрической машины, согласно которому измеряют активную и реактивную составляющие тока статора, внутренний угол и напряжение статора синхронной машины, формируют по активной, реактивной составляющей тока статора и внутреннему углу сигнал, пропорциональный продольной составляющей тока статора, а по напряжению и внутреннему углу - сигнал, пропорциональный поперечной составляющей напряжения статора, вычитают из второго f 5 сигнала первый сигнал, умноженный на коэффициент, равный внешнему эквивалентному реактивному сопротивлению, и используют полученную разность в качестве обобщенного сигнала, отличающийся тем, что, с целью расширения области устойчивости для различных режимов загрузки мащины, по активной, реактивной составляющей тока статора и внутреннему углу формируют сигнал, пропорциональный поперечной составляющей тока статора, по напряжению и внутреннему углу формируют сигнал, пропорциональный продольной составляющей напряжения статора, суммируют первый вновь полученный сигнал, умноженный на коэффициент, равный внешнему эквивалентному реактивному сопротивлению, с вторым вновь полученным сигналом и используют полученную сумму в качестве второго обобщенного сигнала, дифференцируют один из обобщенных сигналов, делят полученную производную на второй обобщенный сигнал и полученный результирующий сигнал используют в качестве стабилизирующего параметра.
20
25
30
35
/2
/5
П
/#
/7
U
ищ
Ц 1
/
и
Idl Udi Usd Фиг. 2
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для формирования стабилизирующего параметра для регулирования возбуждения синхронной электрической машины | 1987 |
|
SU1510062A1 |
| Стабилизатор для регулятора возбуждения синхронной машины | 1977 |
|
SU658694A1 |
| Способ формирования стабилизирующего параметра для регулирования возбуждения синхронной электрической машины | 1990 |
|
SU1720139A1 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ ВРАЩЕНИЯ ТРЕХФАЗНОЙ МАШИНЫ | 2013 |
|
RU2557071C2 |
| Способ регулирования возбуждения обратимой синхронной электрической машины | 1991 |
|
SU1820476A1 |
| Способ регулирования возбуждения асинхронизированной синхронной машины и устройство для его осуществления | 1991 |
|
SU1838871A3 |
| Способ управления бесщеточной синхронной машиной | 1985 |
|
SU1305821A1 |
| Способ управления бесщеточной синхронной машиной | 1988 |
|
SU1624657A2 |
| Способ регулирования тока возбуждения синхронной машины | 1987 |
|
SU1534743A1 |
| Способ регулирования источника реактивной мощности при его совместной работе с асинхронным генератором | 1990 |
|
SU1741223A2 |

Изобретение относится к электротехнике и может быть использовано для регулирования возбуждения синхронной электрической машины. Цель изобретения - расширение области устойчивости для различных режимов загрузки машины. Для этой цели формируют два сигнала, один из которых состоит из суммы поперечной составляющей напряжения статора и продольной составляющей тока статора, умноженной на коэффициент, равный внешнему эквивалентному реактивному сопротивлению энергосистемы. Другой сигнал является разностью между продольной составляющей напряжения и поперечной составляющей тока статора, умноженной на коэффициент, равный внешнему эквивалентному реактивному сопротивлению энергосистемы. Один из полученных сигналов дифференцируют и делят на другой сигнал. Полученный результирующий сигнал используют в качестве стабилизирующего параметра. 2 ил. § (Л со со 05
| Веников В | |||
| А | |||
| и др | |||
| Сильное регулирование возбуждения.-ГЭИ, М-Л., 1963, с | |||
| Нивелир для отсчетов без перемещения наблюдателя при нивелировании из средины | 1921 |
|
SU34A1 |
| Способ формирования стабилизирующего параметра для регулирования возбуждения синхронной электрической машины | 1974 |
|
SU498704A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
