блока управления, входы которого соединены со входами записи информации уоравляюндего регистра и счетчиков импульсов поворота, отрезков линий и коррекции погрешности, а схема управления печатью связана со схемой управления поступательным движепием.
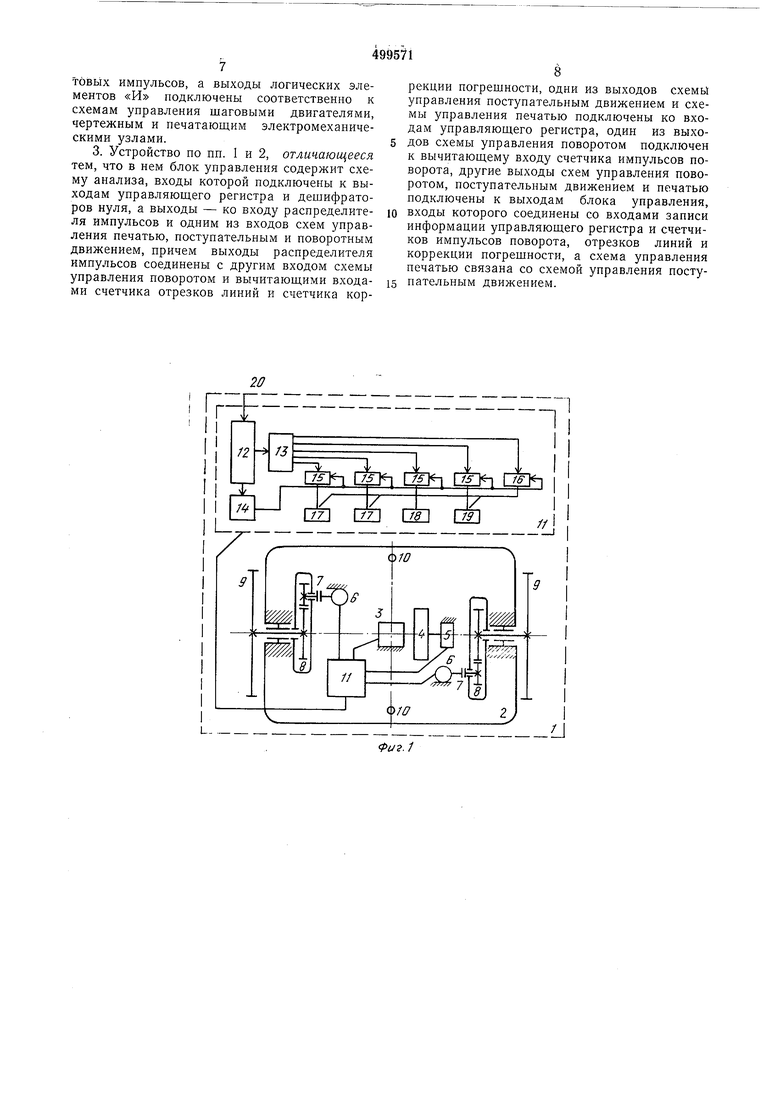
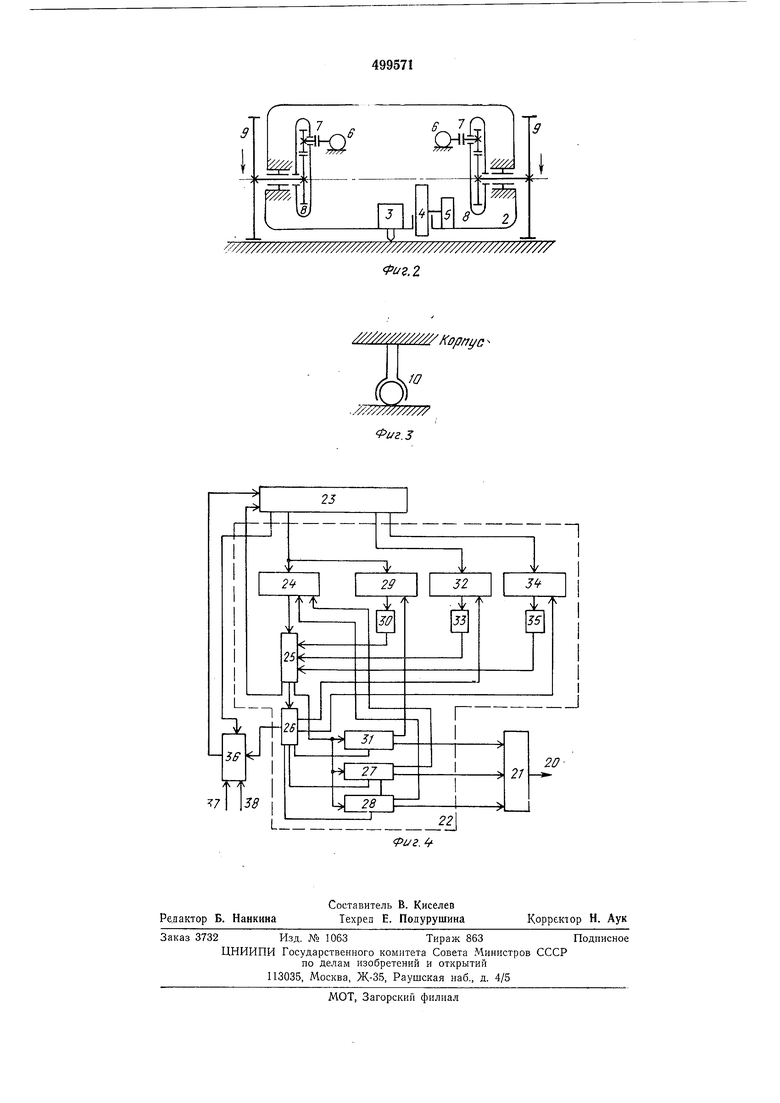
На фиг. 1 показана кинематическая схема (вид сверху) исполнительного органа и его блок формирования исполнительных команд; на фиг. 2 - кинематическая схема (вид спереди); на фиг. 3 - сферическая опора исполнительного органа; на фиг. 4 - блок-схема блока управления.
Исполнительный орган 1 устройства для регистрации графической информации содержит заключенный в корпус 2 чертежный электромеханический узел 3, печатающий электромеханический узел 4, представляющий собой колесо с расположенными по окружности выпуклыми знаками, привод 5 печатающего электромеханического узла 4, шаговые двигатели 6, связанные через муфты 7 с цилиндрическими понижающими редукторами 8, которые соединены с колесами 9. Исполнительный орган 1 дополнительпо опирается на две сферические опоры 10 (фиг. 3).
Шаговые двигатели 6, привод чертежного электромеханического узла 3 и привод 5 печатающего электромеханического узла 4 связаны с блоком 11 формирования исполнительных команд исполнительного органа 1. Блок формирования исполнительных команд включает в себя блок 12 приема команд, содержащий логические и запоминающие ячейки и подключенный к дещифратору 13 команд и генератору 14 тактовых импульсов, выходы которых связаны со входами логических элементов «И 15 и 16. Выход каждого логического элемента «И 15 подключен соответственно к схемам 17 управления шаговыми двигателями, к схеме 18 управления чертежным электромеханическим узлом 3 и к схеме 19 управления печатающим электромеханическим узлом 4, выход логического элемента «И 16 подсоединен к схеме 17, к схеме 18 и к схеме 19. Блок 11 формирования исполнительных команд по каналу 20 через блок 21 передачи команд (фиг. 4), включающий схемы формирования сигналов и закрепленные над планщетом провода для связи.с исполнительным органом 1, подключен к блоку 22 управления, связанному с блоком 23 ввода данных. Блок 22 управления состоит из управляющего регистра 24, связанного со схемой 25 анализа, выход которой, а также выходы связанного с ней распределителя 26 импульсов подключены ко входам схемы 27 управления поступательным движепием и схемы 28 управления печатью, которые своими выходами связаны со-.вХ:Одами управляющего регистра 24 и с блоком 21 .передачи команд, кроме того, в блок 22 управления входят счетчик 29 импульсов поворота с дещифратором 30 нуля, который связан со входом схемы 25 анализа, и схема 31 управления поворотным движением, входы которой подключены к схеме 25 анализа и рас4
пределителю 26 импульсов, а выходы нодключены ко входу счетчика 29 импульсов поворота и входу блока 21 передачи команд.
Для отработки участков линий постоянной
кривизны одним кадром вводимой информации в блоке 22 управления используется счетчик 32 отрезков линий с дещифратором 33нуля, подключенным к схеме 25 анализа, причем вход счетчика 32 отрезков липий связан с распределителем 26 импульсов.
Для обработки полной окружности в счетчик 32 отрезков липий заносится число п отрезков, аппроксимирующих окружность радиуса (с погрешностью аппроксимации в один
шаг)
п Ш
где Е - целая часть отношения; R - радиус окружности.
При этом в управляющий регистр 24 вводится длина одного отрезка / в щагах, равная
/ 21/2/ -1,
25 а в счетчик 29 имнульсов поворота запосится число, равное
2 arcts R-
2/ш
ardg
где /ш - размер одного щага; L - расстояпие между колесами исполиительного 1.
Для уменьшения погрешности, возникающей из-за дискретного характера иоворота исполнительного органа 1, в блоке 27 управления используется счетчик 34 коррекции погрешности с дешифратором 35 нуля, подключенный к схеме 25 анализа, причем вход счетчика 34 коррекции погрешности связан с распределителем 26 имнульсов. В счетчик коррекции погрешности заносится число, равное
2/ш 1
arcts
где а - погрешность угла разворота испол50 нительного органа 1 при переходе от одного аппроксимирующего отрезка к другому
1
2/ш L
(
-arctgi
55 Для ускорения печати символов схема 28 управлепия печатью соединена со схемой 27 управлепия поступательным движением, а в блоке 11 формирования исполнительных команд используется логический элемент «И 16
60 (фиг. 1).
Для получения возможности контроля и корректировки положения нсполнительного органа 1 используется блок 36 вычисления коррекции (фиг. 4), связанный с распределителем 26 импульсов и с блоком 23 ввода данных и подключаемый соответственно но каналам 37 и 38 к измерительному блоку гироскона, установленному на иснолнительный орган I, и к датчикам ноложения, установленным по периметру планшета (на чертеже не изображены).
Питание к электрическим схемам исполнительного органа 1 подводится с номощью проводоВ; закрепленных над планшетом.
Устр&йство работает следуюш;им образом. Из блока 23 ввода данных в блок 22 унравления вводится исходная информация, которая анализируется схемой 25 анализа. В случае, если команда исполнительная и необходимо вычертить линию, то происходит анализ на нуль содержимого счетчика 29 импульсов поворота и при неравенстве его нулю производится подключение распределителя 26 нмпульсов к схеме управления 31 поворотным, движением. В зависимости от состояния унравляюш его регистра 24 вырабатывается соответствующая последовательность импульсов, определяюш,ая команду поворота, которая через блок 21 передачи команд поступает в блок 12 приема команд и расшифровывается дешифратором 13 команд. После этого запускается генератор 14 тактовых импульсов и на схемы 17 управления шаговыми двигателями 6 начинают поступать импульсы, под воздействием которых формируются унравляюн1ие сигналы для шаговых двигателей 6. При развороте исполнительного органа 1 колеса 9 движутся в противоположных направлениях. Одновременно с этим схема 31 управления поворотным движением посылает на счетчик 29 импульсов поворота импульсы вычитания на каждый шаг поворота. После установки счетчика 29 импульсов поворота в нуль по команде схемы 25 анализа схема 31 управления поворотным движением посылает команду окончания разворота, по которой отключается генератор 14 тактовых импульсов и освобождается блок 12 приема команд. Затем производится анализ состояния чертежного электромеханического узла 3 и, если его состояние не соответствует содержимому унравляюш,его регистра 24, то схема 27 управления поступательным движением вырабатывает команду подъема или опускания чертежного электромеханического узла 3, после исполпения которой блок 27 управления поступательным движением формирует команду движения, по которой колеса исполнительного органа 1 отрабатывают определенное число шагов в заданном направлении, одновременно с этим из содержимого управляюндего регистра 24 вычитается по единице на каждый шаг. Работа продолжается до обнуления разрядов управляющего регистра 24, содержащих необ.ходимое число шагов, после чего производится опрос дешифраторов 33 и 35 нуля и, в случае ненулевого содержимого счетчиков 32 и 34, из содержимого счетчика 34 коррекции погрешности вычитается единица. Если он после этого переходит в нулевое состояние, что свидетельствует о необходимости корректировки ориентации па единичный поворот, то схема
31управ.;геиия поворотным двпжеиием вырабатывает команду единичного поворота. Затем в счетчике 34 коррекции погрешности восстанавливается начальное содержимое, считываемое из блока 23 ввода данных.
Если нри вычерчивании линии постоянной кривизны после отработкн очередного аппроксимирующего отрезка содержимое счетчика
32отрезков линий не равно нулю, то вычитается единица, причем в управляющий регистр 24 и счетчик 29 импульсов поворота из блока 23 ввода данных считывается их начальное
5 содержимое, после чего начинается отработка следующего отрезка. Конец вычерчивания определяется нулевым содержимым счетчика 32 отрезков лнннй.
При отработке символьной ииформации
20 вырабатывается команда, по которой через логический элемент «И 16 производится одновременный запуск схем 17 управления шаговыми двигателями 6 и схемы 19 унравления печатающим , электромеханическим узлом 4.
25 Переход интервала между символами и поворот на нужный угол печатаюи;его электромеханического узла 4 происходит одновременно. Конец отработки интервала и момент при.хода печатающего электромеханического узла 4 в
30 нужное положение фиксируются с номощью определенных разрядов управляющего регистра 24. По команде корректировки ноложения в блоке 36 вычисления коррекции сравнивается положение иснолпительного органа 1 с показаниями датчиков ноложения, либо сравнивается необходимый угол ориентации с показанием измерительного блока гироскопа, после чего в блок 23 ввода данных передается команда корректировки.
40
Формула изобретения
1. Устройство для регистрации графической информации, содержащее планшет, коорди45 патный механиз.м, состоящий из шаговых двигателей, связанных через муфты с понижаюндими редукторами, чертежного и печатающего электромеханических узлов, блок ввода данных, выходы которого подключены через
50 последовательно соединенные блок управления, блок передачи команд и блок приема команд ко входам блока формирования исполнительных команд, отличающееся тем, что, с целью повышения точности работы устройства, оно содерл ;цт подвижную платформу с колесной нарой, на которой размещен координатный механизм, поннжающие редукторы которого кинематически связаны с колесной парой.
60 2. Устройство по п. 1, отличающееся тем, что в нем блок формирования исполнительных элементов содержит дешифратор команд, выходы которого подключены к одним из входов логических элементов «И, другие входы
65 которых соединены с выходом генератора тактовых импульсов, а выходы логических элементов «И подключены соответственно к схемам управления шаговыми двигателями, чертежным и печатающим электромеханическими узлами.
3. Устройство по пп. 1 и 2, отличающееся тем, что в нем блок управления содержит схему анализа, входы которой подключены к выходам управляющего регистра и деняифраторов нуля, а выходы - ко входу распределителя импульсов и одним из входов схем управления печатью, поступательным и поворотным движением, причем выходы распределителя импульсов соединены с другим входом схемы управления поворотом и вычитающими входами счетчика отрезков линий и счетчика коррекции погрещности, одни из выходов схемы управления поступательным движением и схемы управления печатью подключены ко входам управляющего регистра, один из выходов схемы управления поворотом подключен к вычитающему входу счетчика импульсов поворота, другие выходы схем управления поворотом, поступательным движением и печатью подключены к выходам блока управления, входы которого соединены со входами записи информации управляющего регистра и счетчиков импульсов поворота, отрезков линий и коррекции погрешности, а схема управления печатью связана со схемой управления поступательным движением.
| название | год | авторы | номер документа |
|---|---|---|---|
| Пишущая машина со средством управления кареткой | 1975 |
|
SU973008A3 |
| Линейный интерполятор | 1989 |
|
SU1674064A1 |
| Алфавитно-цифровое печатающее устройство | 1979 |
|
SU963019A1 |
| Интерполятор для шагового графопостроителя | 1974 |
|
SU528588A1 |
| Линейный интерполятор | 1986 |
|
SU1383302A1 |
| МНОГОФУНКЦИОНАЛЬНОЕ УСТРОЙСТВО | 2009 |
|
RU2410844C2 |
| Устройство для управления пишущей машинкой | 1981 |
|
SU951289A2 |
| Линейный интерполятор | 1988 |
|
SU1522157A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ И ПРИЕМА ДИСКРЕТНЫХ СИГНАЛОВ | 1990 |
|
RU2012149C1 |
| Устройство измерения напряжения химического источника тока | 1983 |
|
SU1096719A1 |
1
//////////////////////////
г.2
////////////////// nn,,f.
