1
(21) 4374119/24-24 (22) 01.02.88 (46) 15.11.89. Бюп. К 42
(71)Минский радиотехнический институт
(72)Ю.И.Тормышев (53) 681.325 (088.8)
, (56) Авторское свидетельство СССР № 1089551, кл. G 05 В 19/415, 1984.
Авторское свидетельство СССР по заявке № 4142776/24-24, кл. С 05 В 19/415, 04.11.87.
Ш) ЛИНЕЙНЫЙ ИНТЕРПОЛЯТОР (57) Изобретение относится к автоматике и вычислительной технике и может быть использовано в построителях
графической информации и в системах числового программного управления исполнительным оборудованием. Цель изобретения - повышение точности интерполяции. Эта цель достигается тем, что в устройство, содержащее сумматор оценочной функции накапливающего типа, первый и второй регистры сдвига, распределитель штульсов, два элемента задержки, заданщий генератор, счетчик конца интерполяции, триггер режима работы, триггер знака, семь лг- ментов ИЛИ, четыре элемента И, дополнительно введен мультиплексор и три младших разряда счетчика конца интерполяции, объединенные между собой новыми информационными связями. 6 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Линейный интерполятор | 1989 |
|
SU1674064A1 |
| Линейный интерполятор | 1986 |
|
SU1383302A1 |
| Цифровой линейный интерполятор | 1991 |
|
SU1807450A1 |
| Линейный интерполятор | 1991 |
|
SU1809421A1 |
| Цифровой линейный интерполятор | 1989 |
|
SU1693592A1 |
| Цифровой линейный интерполятор | 1989 |
|
SU1675849A1 |
| Цифровой линейный интерполятор | 1987 |
|
SU1434406A1 |
| Линейный интерполятор | 1986 |
|
SU1413603A1 |
| Устройство для отображения векторов на экране электронно-лучевой трубки | 1988 |
|
SU1635171A1 |
| Линейный интерполятор | 1987 |
|
SU1439532A1 |
Изобретение относится к автоматике и вычислительной технике и может быть использовано в построителях графической информации и в системах числового программного управления исполнительным оборудованием. Цель предлагаемого изобретения - повышение точности интерполяции. Эта цель достигается тем, что в устройство, содержащее сумматор оценочной функции накапливающего типа, первый и второй регистры сдвига, распределитель импульсов, два элемента задержки, задающий генератор, счетчик конца интерполяции, триггер режима работы, триггер знака, семь элементов ИЛИ, четыре элемента И, дополнительно введен мультиплексор и три младших разряда счетчика конца интерполяции, объединенные между собой новыми информационными связями. 6 ил.
Изобретение относится к автоматике и вычислительной технике и может быть использовано в построителях графической информации и в системах числового программного управления.
Цель изобретения - повьппение точности интерполяции.
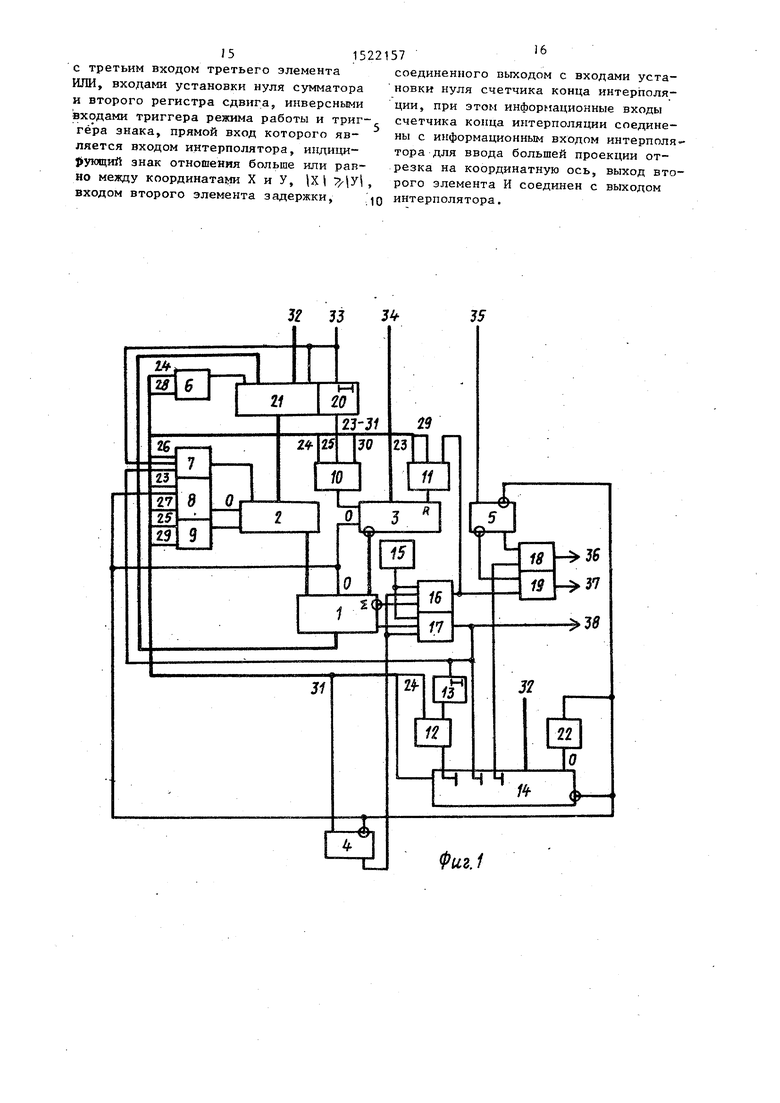
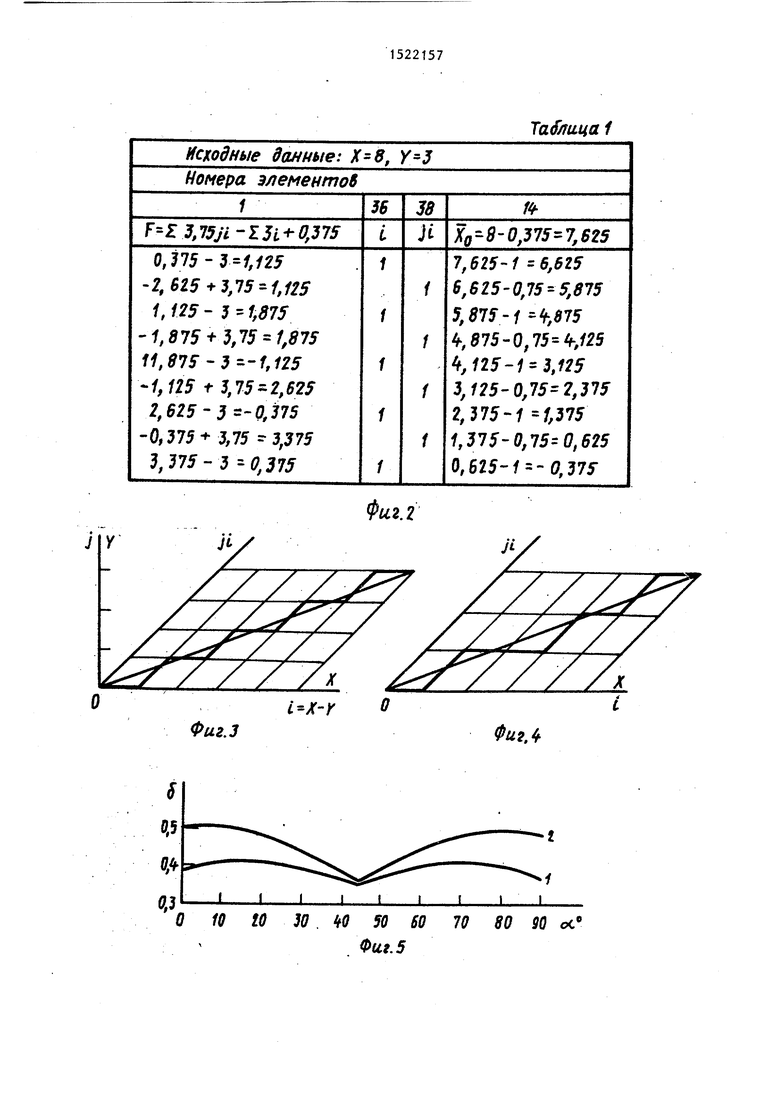
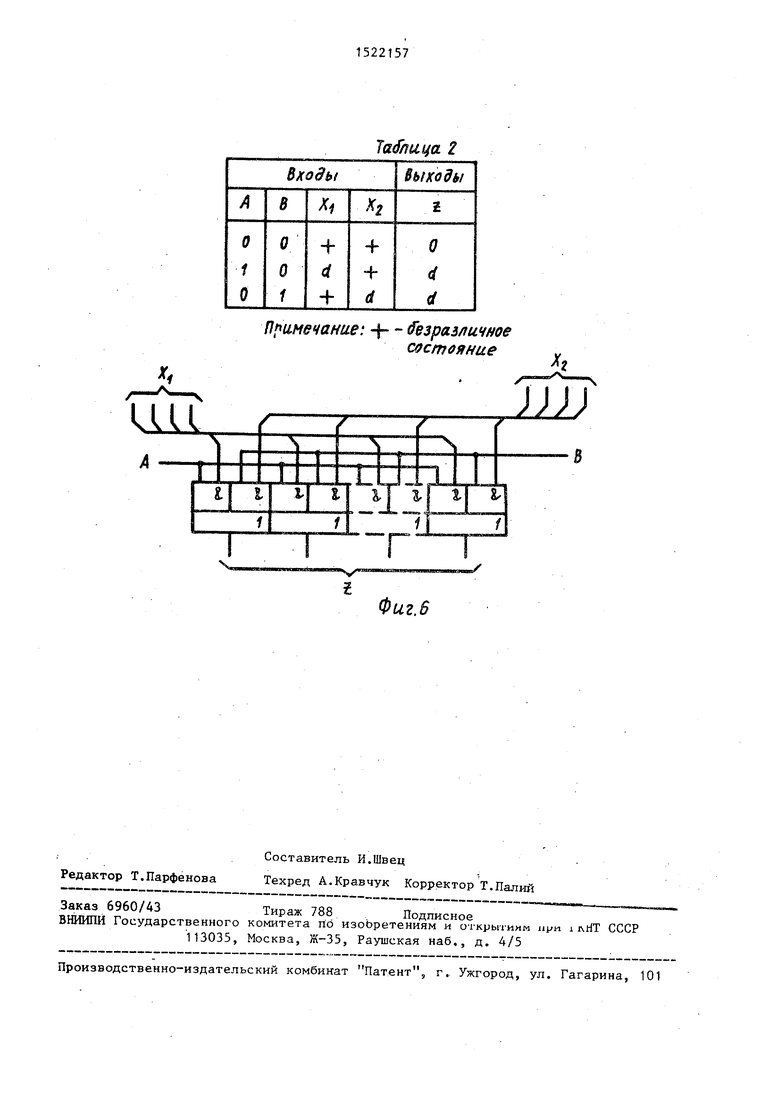
На фиг.1 приведена структурная схема предлагаемого устройства; на фиг.2 - табл.1 (пример расчета линейной траектории с использованием предлагаемого интерполятора); на фиг.З и 4 - примеры траекторий, сформированных соответственно с помощью предлагаемого устройства и устройства-прототипа; на фиг.5 - зависимости (1 и 2) изменения погрешности от угла наклона отрезка для предлагаемого устройства (1) и устройства-прототипа (2); на фиг.6 - пример реализации
мультиплексора и табл. 2 режима его работы.
Интерполятор содержит сумматор 1 накапливающего типа, первый 2 и второй 3 регистры сдвига, триггер 4 режима работы, триггер 5 знака, первый 6, второй 7, третий 8, четвертый 9, пятьп 10, шестой 11 и седьмой 12 логические элементы ИЛИ, первый элемент 13 задержки, вычитающий счетчик 14 конца интерполяции, генератор 15 тактовых импульсов, первый 16, второй 17, третий 18 и четвертый 19 логические элементы И, распределитель 20 импульсов, мультиплексор 21 и второй элемент 22 задержки.
Сумматор 1 оценочной функции является сумматором накапливающего типа с циклическим переносом единицы переноса из старшего разряда в младший, что дает возможность осуществлять суммирование чисел, представленных в прямом и обратном кодах. В сумматоре в процессе работы хранится значение оценочной функции, определяемое выражением (1). Сумматор имеет входы приема первого и второго слагаемого, причем на входы приема первого слагаемого из регистра 2 сдвига поступает прямой код положительного числа, а на входы прием второго слагаемого поступает значени отрицательного числа, представленног в обратном коде. Сумматор имеет вход установки нуля,соединенный с выходом старшего разряда счетчика 14 конца интерполяции. Кроме того, сумматор имеет знаковый разряд, состояние которого указывает на знак хранимого в сумматоре числа. Единичное состояние знакового разряда сз мматора соответствует отрицательному значению числа, находящемуся в сумматоре, а нулевое - положительному.
Первый 2 и второй 3 регистры сдвига служат для ввода в них исходных данных о проекциях отрезка на координатные оси. В регистр 2 вводится проекция большего, а в регистр 3 - меньшего отрезка. Затем в регистре 2 формируется значение проекции отрезка в новой косоугольной системе координат, используемое затем при формировании шаговой траектории. Регистры 2 и 3 сдвига вьтолнены по обычной схеме и имеют информационные входы, у регистра 2 они соединены с выходами мультиплексора 21, а у регистра 3-е входом ввода ведомой проекции интерполятора, и следующие управляющие входы: входы разрешения передачи содержимого регистра в сумматор 1, соединенные соответственно с выходаьш второго 7 и шестого 11 элементов ИЛИ, входы управления сдвигом, соединенные соответственно с вы ;ходами четвертого 9 и пятого 10 элементов ИЛИ, входы установки регистров в состояние нуль, соединенные ..соответственно с выходами третьего элемента ИЛИ 8 и выходом старшего разряда счетчика 14 конца интерполяции.
Триггер 4 режима работы служит для формирования временного интервала, необходимого для отработки кадра интерполирования. Триггер 5 знака
0
5
0
5
0
5
0
5
0
служит для формирования сигналов, управляющих коммутацией приращений по двум каналамi соответствующих перемещению исполнительного элемента вдоль осей координат X и У. Отношению проекций )Х| соответствует единичное состояние триггера, в которое он устанавливается сигналом, поступающим с входа устройства. Первый 6, второй 7, третий 8, четвертьй 9, пятый 10, шестой 11 и седьмой 12 элементы ИЛИ используются для сборки сигналов, используемых для управления работой отдельных частей устройства. Элемент Ч 3 задержки используется для задержки сигнала на время, необходимое для установления переходных процессов в счетчике 14 конца интерполяции.
Вычитающий счетчик 14 конца интерполяции используется для определения конца кадра интерполирования. Счетчик работает в режиме вычитания поступающих на его счетные входы приращений. Он имеет дробную часть, состоящую из трех младших разрядов. Первые два счетных входа младших разрядов счетчика используются для ввода константы 0,375, представляклцей половину проекции элементарного комбинированного приращения на вторую координатную ось. Эта константа используется для реализации операции округления при подсчете поступающих на счетчик приращений. Второй и третий счетные входы младших ра:зрядов дробной части счетчика используются для.подсчета комбинированных приращений. Суммар- ньШ вес комбинированного приращения равен 0;,75. Счетчик имеет вход установки нуля и информационные входы для установки начального значения большей проекции отрезка на координатную ось.
Генератор 15 тактовых импульсов служит для задания тактового интервала работы интерполятора. Первый 16, второй 17, третий 18 и четвертый 19 элементы И выполняют обычные логические функции. Распределитель 20 импульсов представляет собой многозвенный элемент задержки и служит для выработки последовательности импульсов, необходимых для управления формированием исходных значений параметров в сумматоре 1 и регистрах, 2 и 3 сдвига.
5
Мультиплексор 21 представляет собой двухканальный коммутатор, обеспечивающий выбор одного из двух информационных каналов при подаче на его управляющие входы сигналов выбора каналов.
Второй элемент 22 задержки служит для предотвращения состязания сигналов при установке счетчика 14 в нуле вое состояние. Цифрами с 23 по 31 последовательно обозначены соответственно первый, второй, третий, четвертый, пятый, шестой, седьмой, восьмой и девятый последовательные вы- ходы распределителя импульсов, представляющего многозвенный элемент задержки. Последовательность появления импульсов на выходах распределителя соответствует последовательности ну- мерации его выходов.
Информационный вход 32 интерполятора является входом ввода большей проекции отрезка на координатную ось макс (1X1,.|У|). Вход 33 является , входом ввода .сигнала инициализации приема исходных данных в накопительные элементы и начала работы интерполятора. Информационный вход 34 является входом ввода меньшей проекции отрезка на координатную ось мин (|Х| |У|). Вход 35 является входом ввода сигнала, отражающего знак отношения ;между проекциями отрезка X и У на координатные оси. Сигнал на этот вход подается только лишь при отношении проекций, определяемых нестрогим неравенством I Х| . Выход 36 является выходом интерполятора, обеспечивающим вьщачу единичных приращений по оси У. Выход 37 является выходом, обеспечивающим выдачу единичных приращений по оси X. Выход 38 является выходом, обеспечивающим выдачу приращений одновременно по осям X и У с весом перемещения, равным 0,75 величины шага единичной длины.
Известные схемы интерполирования для уменьшения погрешности интерполирования используют диагональные
перемещения, при этом длина диагонали больше основного шага в . Недостатком такого подхода является невысокая точность приближения формируемой траектории к исходной прямой. Избежать этого недостатка можно, если длину диагональных перемещений сделать близкой к шагу единичной .длины. При этом уменьшение погрешнос
ю 15 0
5 о
0
45
iO
5
1576
ти интерполирования вытекает из того факта, что, чем меньше элементарный шаг, тем выше точность приближения. Заменяя диагональные шаги длиной от основного шага на близкие к единице диагональные шаги, мы достигаем повьш1ения точности интерполирования.
В рассматриваемом варианте технического решения комбинированное диагональное перемещение осуществляется одновременным перемещением вдоль каждой из координатных осей X и У на величину 0,75 основного шага единичной длины. Поскольку диагональное перемещение в этом случае является диагональю прямоугольного равнобедренного треугольника, то величина диагонали этого треугольника, а значит и линейного перемещения составляет ,75 X {Т 1,06066, т.е. величину, близкую к шагу единичной длины.
Значение погрешности устройства- прототипа, обеспечивающего предельно минимальную погрешность интерполирования определяется выражением о 0,5 cosoi , - 45°, а значение погрешности предлагаемого устройства - выражением
0,3953 sin (7l 35 o(); 0-45°,
где - угол наклона интерполирует мого отрезка к координатной оси X,
Из приведенных выражений видно, что максимальное значение погрешностей в первом и втором случаях соот- ретственно равны 0,5 и 0,3953. Графически вид этих погрешностей, обоз- наченньпГ соответственно 1 и 2, приведен на фиг.5. Из этих зависимостей видно, что предлагаемое устройство обеспечивает меньшую погрешность интерполирования. Формируемое изображение можно поворачивать на угол, кратный углу 45 , без дополнительного пересчета координат, что невозможно у известных интерполирующих структур, допускающих поворот изображения без пересчета только на угол, кратный УГЛУ 90°.
Предлагаемое устройство работает на основе метода оценочной функции. Если обозначить большую проекцию че,рез X (|Х У). Тогда выражение оценочной функ1ши, используемой для
П ,
ji,i
Fji+i
Fii
F-,
I У , если Fji ; :. О,
)
,, -j,,, +0,75( IXl - |y|), если Fji 0. Начальное значение оценочной функции определяется в соответствии с вьфа2и в сумматоре 1 будет зап смещенное в сторону младших значение проекции отрезка, 0,125 |Х|.
15
20
25
30
ением:
,10
,5 0,75(1Х1 -1У1) - . (2)
Конец интерполирования определяется о суммарному количеству шагов, выолненных вдоль большей проекции отезка с учетом веса каждого шага. Величина оставшегося пути, который необходимо пройти до конца макси- мальной проекции отрезка на координатную ось X, определяется в соответствии с выражением
X |х| -0,375-O.U (3)
ри X О вычисления прекращаются и раектория считается сформированной.
Если IX1 1У , то в этом случае выражениях (1) - (3) 1Х| замеяется на |У|, I У| заменяется на |Х I , i заменяется на j и Д1 заменяется на Дз.
Устройство работает следунщим образом.
Перед непосредственным формированием шаговой траектории в сзгммато- ре 1 в соответствии с выражением (2) должно быть установлено начальное значение оценочной функции F, а в регистрах 2 и 3 - исходные значения начальных параметров, равные соответственно значениям 0,75 (1x1- |У() и |У|.
В исходном состоянии сумматор 1, регистры 2 и 3 сдвига, триггер 4 режима работы, триггер 5 знака и счетчик 14 конца интерполяции обнулены. При подаче на вход 33 сигнала Начало кадра значение кода с информационных, входов 32, равное большей проекции отрезка на координатную ось (макс( |Х1, |У|)), записьгоается в регистр 2. Это же значение проекции записывается и в счетчик 14 конца интерполяции. Импульс, поступаю1ций со входа ,33 через элемент ИЛИ 7 на управляющий вход регистра 2 разрешает перенос содержимого регистра в сум- 1. Примем для определенности |Х| ,|У, тогда,в связи с тем, что значение проекции отрезка подается на регистр 2 со сдвигом, в регистре
35
40
45
5Q
сг
формирования шаговой траектории, бу- цет описываться следующим выражением;
I У , если Fji ; :. О,
)
(1)
( IXl - |y|), если Fji 0.
2и в сумматоре 1 будет записано смещенное в сторону младших разрядов значение проекции отрезка, равное 0,125 |Х|.
Одновременно с этим с информационных входов 34 интерполятора в регистр
3записывается смещенное в сторону младших разрядов значение меньшей проекции отрезка на координатную ось (мин(|Х(, 1У|) равное (при ) ,125 У, а триггер 5 при I X | :5 сигналом со входа 35 интерполятора устанавливается в состояние 1.
После установления переходных про- цeccoв в регистрах, сумматоре и счет- чиках распределитель 20 импульсов вырабатывает на своем выходе 23 сиг- . нал, который проходит через элемент ШШ 8 на управляюрщй вход регистра 2 и обнуляет его. Этот же сигнал с выхода 23 через элемент ИЛИ 11 поступает на управляющий вход регистра 3 и разрешает перенос с инверсных выходов содержимого этого регистра в сумматор 1. Б результате этого содержимое регистра вычитается из содержимого сумматора и в сумматоре оказывается записанным значение разности проекций
отрезков на координатные оси, равное
21 0,125 (|Х -|УО.
Одновременно сигнал, поступаюпщй с
выхода 23 распределителя импульсов на вход вычитания младшего разряда счетчика 14 конца интерполяции, вычитает из его содержимого значение числа, равное весу младшего разряда
счетчика, в результате чего содержимое счетчика уменьшается на эту величину и становится равным, при |Х |У1, tXl 0,125.
После установления переходных
процессов в сумматоре и счетчике распределитель 20 импульсов вырабатывает на своем выходе 24 сигнал, поступающий через элементы ШШ 6, 10 и 12 соответственно на управляющие входы
мультиплексора 21 и регистра 3 и вход вычитания второго младшего разряда счетчика 14. При этом содержимое сумматора 1 переносится в регистр 2 Rg .0,125 г( |Х| - |У1), и содержимое
регистра 3 сдвигается на один разр право и становится рглньм R j 2-0,125 У 0,25 |У, а из содежимого счетчика вычитается вес второго младшего разряда счетчика, в результате его содержимое становит равным Хо(1х| - 0,125)-0,25 |Х| 0,375.
После установления переходных процессов в регистрах 2 и 3 распрелитель 20 импульсов вырабатывает н своем выходе 25 сигнал, поступаюрщ через элементы ИЛИ 9 и 10 соответсвенно на управляющие входы регистр 2 и 3,в результате чего содержимое регистров сдвигается на один раяря вправо и становится со.ответствеино равным 0,125 (1X1 -|У|) 0,25(1X1 -|У)и R,,2 «0,25 1У| 0,5 У1.
Следующий импульс, появляющийся на выходе 26 распределителя 20 импульсов, проходит через элемент , ИЛИ 7 на управляющий вход регистра 2, разрешая перенос его содержимог в сумматор 1. Содержимое сумматора суммируется с .содержимым регистра и становится равным ,125(1x 1У|)+0,25(1X1 -(У| 0,375(1X1 -|У|)
Импульс, появляющийся на выходе 27 распределителя 20 импульсов через элемент ШШ 8 поступает на вход регистра 2 и обнуляет его. Импульс, появляющийся на выходе 28 распределителя 20 импульсов, поступает через элемент ШШ 6 на управляющий вход мультиплексора 21 и разрешает перенос содержимого сумматора 1 в регистр 2, в результате чего содержимое регистра становится равным Pvi 0,375 (|Х| ).
Импульс, появляющийся на выходе 29 .распределителя 20 импульсов, пос - тупает через элементы ИЛИ 9 и 11 соответственно на управляющие входы регистров 2 и 3, в результате чего содержимое регистра 2 сдвигается на один разряд вправо и становится равным R2. 2 0,375(1X1 - 1УО 0,75.(|Х| - |У| , а содержимое регистра 3 переносится в сумматор 1 и вычитается из его содержимого. Содержимое сумматора при этом становится равным ,375(|Х1 - |У|)-0,5 |У| FO. На этом формирование начального значения оценочной функции в сумматоре I заканчивается.
0
5
2157
10
Следующий импульс, появляющийся на выходе 30 распределителя 20 импульсов поступает через элемент ИЛИ 10 на управляющий вход регистра 3 и сдвигает его содержимое на один разряд вправо, в результате чего содержимое регистра становится равным Rg 2 0,5 У У. К этому моменту времени все начальные значения параметров в сумматоре 1 и регистрах 2 и 3, необходимые для дальнейшей работы интерполятора, оказываются сформированными. Поэтому импульс, появляющийся на выходе 31 распределителя 20 импульсов, поступает на прямой вход триггера 4 режима работы включает его в единичное состояние и с этого момента времени начинается отработка 0 шаговой траектории прямолинейного отрезка, заданного своими проекциями на оси координат.
Разрешающий потенциал с единичного выхода триггера 4 режима работы поступает на входы элементов И 16 и 17, на другие входы которых поступают им- пульсы с генератора 15 тактовых импульсов. В зависимости от знака числа, находящегося в сумматоре, изменяется состояние знакового разряда сумматора. Отрицательному значению числа соответствует единичное состояние знакового разряда, положительному или нулевому значению соответствует нулевое состояние знакового разряда сум ато- ра. Если содержимое сумматора 1 положительно или равно нулю, разрешающие потенциалы присутствуют на всех входах логического элемента И 16, если . отрицательно - на всех входах логического элемента И 17. В зависимости от этого импульсы с генератора 15 тактовых импульсов проходят на выход .соответствующего логического элемента И-16 или 17. При положительном или нулевом значении числа, находящегося в сумматоре 1, импульсы генератора 15 тактовых импульсов прО7 ходят на выход логического элемента И 16 и через элемент ИЛИ 11 на управляющий вход регистра 3, вызывая перенос его содержимого в сумматоре 1. С каждым таким переносом в соответствии с выражением (1) из содержимого сумматора вычитается содержимое регистра 3. Этот процесс продолжается до тех пор, пока содержимое сзт матора 1 не станет отрицательным.
При отрицательном значении содержимого сумматора импульсы генератора 15 тактовых импульсов проходят .на выхо;; логического элемента И 17 и через элемент ИЛИ 7 поступают на управляющий вход регистра 2, вызывая перенос его содержимого в сумматор 1. После каждого такого переноса содержимое сумматора в соответствии с выражением (1) суммируется с содержимым регистра 3, Этот процесс продолжается до тех пор, пока содержимое сумматора опять не станет отрицательным, после чего опи санный процесс работы повторяется. Подсчет количества оставшихся до конца отрезка шагов осуществляется счетчиком 14 конца интерполяции. Для этого из содержимого счетчика, равного длине максимальной величине проекции отрезка на координатную ось с учетом корректирующей добавки в соответствии с выражением (3), вычитается величина текущего приращения по координате . Поскольку величины приращений по осям координат неодинаковы, поэтому и.з содержимого счетчика вычитается соответствующая каждому шагу величина элементарного перемеще ния. Так, при перемещении вдоль осей X и У величина элементарного перемещения равна единице, поэтому из содержимого счетчика при обработке перемещений вдоль этих осей при появлении импульсов на выходе логического элемента И 16 каждьв1 раз вычитается единичное приращение. При комбинированном перемещении величина шага вдоль координатных осей составляет 0,75 величины единичного шага, поэтому при появлений импульсов на вы- ходе логического элемента И 16, соответствующих отработке комбинированных перемещений вдоль обеих координатных осей, из содержимого счетчика каждый раз вычитается величина текущего перемещения, равного 0,75 от величины единичного шага. Для выполнения этой процедуры импульс с выход логического элемента И 17 сначала поступает на вход вычитания третьего младшего разряда счетчика и вычитает из его Содержимого значение веса этого разряда, равного 0,5. После этого импульс с выхода логического элемент И 17 через элемент 13 задержки и элемент ИЛИ 12 поступает на вход вычитания второго младшего разряда счетчи
0
5
Q
ка 14 и вычитает из содержимого счетчика вес этого разряда, равный.О,25 основного шага приращения. Таким образом, при каждом появлении импульса с выхода логического элемента И 17 из содержимого счетчика вычитается значение. очеред,ного приращения, равного 0,75 значения от основного единичного шага. Описанный процесс работы продолжается до тех пор, пока не будет отработано заданное в счетчике 14 конца интерполяции число шагов перемещения вдоль наибольшей проек1щи на координатную ось. Значение содержимого счетчика при этом становится отрицательным, счетчик переполняется,и импульс переполнения с выхода старшего разряда счетчика поступает на вход сумматора 1, регистра 3 и через логический элемент ИЛИ 8 на вход регистра 2, а также на входы регистров 4 и 5 и через элемент 22 задержки на собственные входы, устанавливая названные элементы в нулевое состояние.Работа интерполятора на этом прекращается, и схема готова к приему очередного кадра информации.
Поскольку, координатная ось с большей проекхдаёй отрезка может для раз- .ных кадров меняться, поэтому требуется коммутация единичных приращений по соответствующим осям координат. Для этой цели используется триггер 5 знака, определяющий знак отношения между проекциями отрезка X и У на оси координат. Если в качестве небольшой -проекции отрезка используется проекция отрезка на ось X, триггер 5 знака при вводе исходных данньк устанавливается сигналом со входа 35 интерполятора в единичное состояние и импульсы с выхода элемента И 16 в течение всего кадра интерполяции проходят на выход элемента И 18, обеспечивая вьщачу единичных приращений в канал X на выход 36 интерполятора. Если же в качестве наибольшей проекции отрезка используется его проекция на ось У, то. триггер 5 знака остается в нулевом состоянии и импульсы с выхода элемента И 16 проходят на выход элемент та И 19 и выход 37 интерполятора, обеспечивая выдачу единичных прира- 5 щений в канал У. ОдковременнБ1м пере-, мещениям .вдоль координатных осей X и У соответствует появление импульсов на выходе логического элемента
5
0
5
0
И 17 и выходе 38 интерполятора, при этом величина элементарного перемещения вдоль каддой координатной оси соответствует 0,75 величины единичного шага. Величина диагонального перемещения при этом составляет 0,75 2 1,06066, что уменьшает погрешность интерполирования по сравнению с известными методами.
Предлагаемое устройство обеспечивает более высокую точность интерполирования. Достоинством предлагаемого способа является также и возможность поворота формируемых траекто- рий на угол,кратный 45, без дополнительного пересчета координат, в то время как известные технические решения допускают повороты, кратные углу 90 .
Формула изобретения
Линейный интерполятор, содержащий сумматор накапливающего типа, у кото рого входы приема первого и второго слагаемых соединены с прямыми выходами первого регистра сдвига и инверсными выходами второго регистра сдвига, входы которого являются входами ввода меньший проекции отрезка на координатную ось, триггер режима работы, триггер знака, первый и второй элементы ИЛИ, выход второго элемента ИЛИ соединен с входом управления переносом содержимого первого регистра сдвига в сумматор, третий, четвертый пятый, шестой и седьмой элементы ИЛИ первый и второй элементы задержки, счетчик конца интерполяции, генератор тактовых импульсов, первый и второй элементы И, первые входы которых соединены соответственно с инверсным и прямым выходами знакового разряда сумматора, вторые входы соединены с прямым выходом триггера режима работы, третьи входы - с выходом генератора тактовых импульсов, выход первого элемента И соединен с первым входом вычитания счетчика конца интерполяции, выход второго элемента И соединен с первым входом второго элемента 1ШИ, третий и четвертый элементы И, первые входы которых соединены соответственно с прямым и инверсным выходами триггера знака, а выходы соединены с выходами интерполятора вьщачи единичных приращений по осям X и У соответственно, распределитель
|5 0
5
0
5
0
5
0
5
импульсов, соединенный первьЕм выходом с вторым входом шестого и вторым выходом с первым входом первого эле- ИНН, отличающи и . тем, что, с целью повьш1ения точности, в него дополнительно введен мультиплексор, в вычитающий счетчик конца интерполяции введены три младших разряда и распределитель импульсов, причем выходы мультиплексора соединены с входами первого регистра сдвига, первые информационные входы мультиплексора соединены с выходами сумматора, вторые информационные входы являются входами интерполятора для ввода большей проекции отрезка на координатную ось, первый вход мультиплексора соединен с выходом первого элемента ИЛИ, второй вход соединен с входом начала работы интерполятора и вторым входом второго элемента ИЛИ, первьй выход распределителя импульсов соединен с первым входом третьего элемента ИЛИ и со счетным входом первого младшего разряда счетчика конца интерполяции, второй выход соединен с первыми входами пятого и седьмого элементов ШШ, третий выход соединен с первым и вторым входами соответственно четвертого и пятого элементов ИЛИ, четверт й, пятый и шестой выходы соединены соответственно с третьим входом второго, вторым входом третьего и вторым входом первого элементов ИЛИ, седьмой выход соединен с вторым и третьим входами соответственно четвертого и шестого элементов ИЛИ, восьмой и девятый выходы соединены с третьим и прямыми входами соответственно пятого мента ШШ и триггера режима работы, выходы третьего и четвертого элементов ШШ соединены соответственно с входами установки нуля и управления сдвигом содержимого первого регистра сдвига, выход пятого элемента ИЛИ соединен с входом управления сдвигом содержимого второго регистра сдвига, счетные входы второго и третьего мпадиих разрядов счетчика конца интерполяции соединены соответственно с выходом седьмого элемента ИЛИ и выходом второго элемента И, вход перво- го элемента задержки соединен с выходом второго элемента И, а выход - с вторым входом седьмого элемента ИЛИ, инверсный выход старшего разряда счетчика конца интерполяции соединен
1515221
с третьим входом третьего элемента ИЛИ, входами установки нуля сумматора и второго регистра сдвига, инверсными входами триггера режима работы и триггера знака, прямой вход которого является входом интерполятора, ипдици- | ую1ций знак отношения больше или равно между координатами X и У, К , входом второго элемента задержки,
5f 33 3
57
16
соединенного выходом с входами установки нуля счетчика конца интерполяции, при этом информационные входы счетчика конца интерполяции соединены с информационным входом интерполя- тора для ввода большей проекции отрезка на координатную ось, выход второго элемента И соединен с выходом интерполятора.
5
JiУ
, /
Фиг.З
S 0,5 ffA 0.
О 10 to JO
kO 50 60 Фиг. 5
Та /гица 1
Фиг.2
Фи2А
70 80 90 сх.
nf fiMS4aHu.e: -f- - безразличное
Jafflu a 2
Фиг.6
